Darius Burschka
Paper download is intended for registered attendees only, and is
subjected to the IEEE Copyright Policy. Any other use is strongly forbidden.
Papers from this author
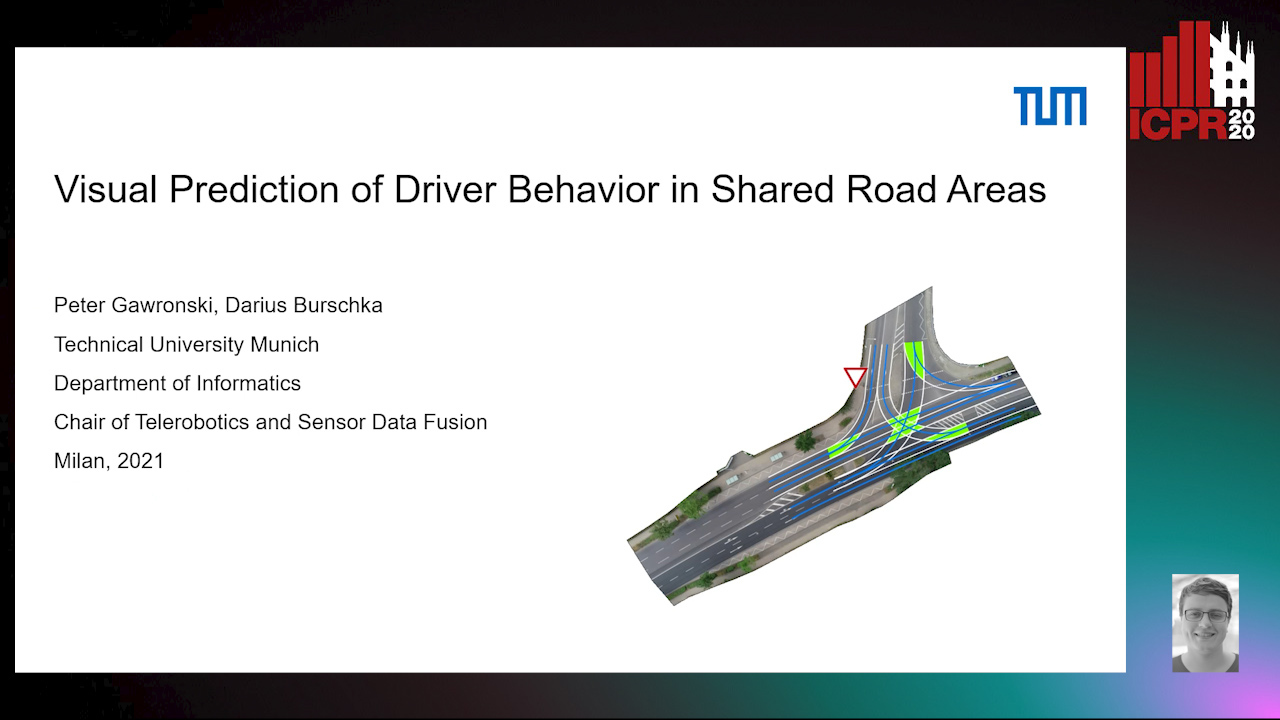
Visual Prediction of Driver Behavior in Shared Road Areas
Peter Gawronski, Darius Burschka
Auto-TLDR; Predicting Vehicle Behavior in Shared Road Segment Intersections Using Topological Knowledge
Abstract Slides Poster Similar
We propose a framework to analyze and predict vehicles behavior within shared road segments like intersections or at narrow passages. The system first identifies critical interaction regions based on topological knowledge. It then checks possible colliding trajectories from the current state of vehicles in the scene, defined by overlapping occupation times in road segments. For each possible interaction area, it analyzes the behavioral profile of both vehicles. Depending on right of way and (unpredictable) behavior parameters, different outcomes are expected and will be tested against input. The interaction between vehicles is analyzed over a short time horizon based on an initial action from one vehicle and the reaction by the other. The vehicle to yield most often performs the first action and the response of the opponent vehicle is measured after a reaction time. The observed reaction is classified by attention, if there was a reaction at all, and the collaboration of the opponent vehicle, whether it helps to resolve the situation or hinders it. The output is a classification of behavior of involved vehicles in terms of active participation in the interaction and assertiveness of driving style in terms of collaborative or disruptive behavior. The additional knowledge is used to refine the prediction of intention and outcome of a scene, which is then compared to the current status to catch unexpected behavior. The applicability of the concept and ideas of the approach is validated on scenarios from the recent Intersection Drone (inD) data set.