Robert Piechocki
Papers from this author
N2D: (Not Too) Deep Clustering Via Clustering the Local Manifold of an Autoencoded Embedding
Ryan Mcconville, Raul Santos-Rodriguez, Robert Piechocki, Ian Craddock
Auto-TLDR; Local Manifold Learning for Deep Clustering on Autoencoded Embeddings
Translation Resilient Opportunistic WiFi Sensing
Mohammud Junaid Bocus, Wenda Li, Jonas Paulavičius, Ryan Mcconville, Raul Santos-Rodriguez, Kevin Chetty, Robert Piechocki
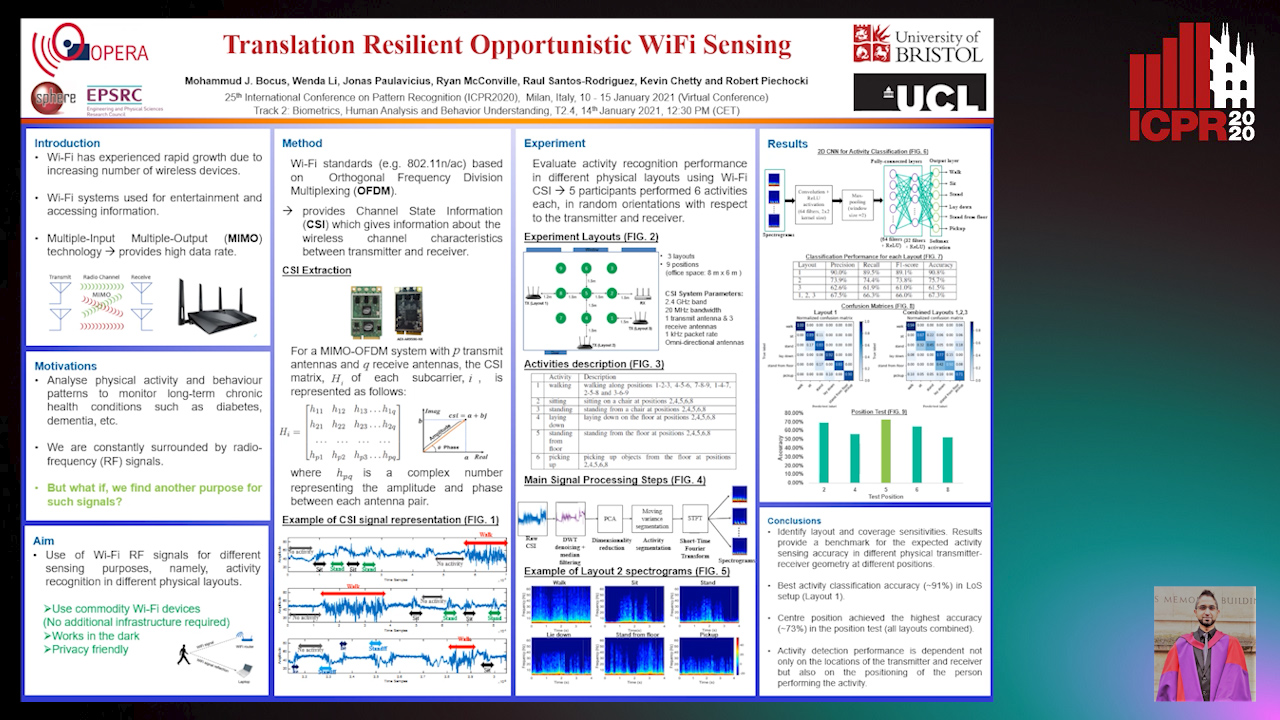
Auto-TLDR; Activity Recognition using Fine-Grained WiFi Channel State Information using WiFi CSI
Abstract Slides Poster Similar
Wireless Localisation in WiFi Using Novel Deep Architectures
Peizheng Li, Han Cui, Aftab Khan, Usman Raza, Robert Piechocki, Angela Doufexi, Tim Farnham
Auto-TLDR; Deep Neural Network for Indoor Localisation of WiFi Devices in Indoor Environments
Abstract Slides Poster Similar