Ching-Chun Huang
Papers from this author
DEN: Disentangling and Exchanging Network for Depth Completion
You-Feng Wu, Vu-Hoang Tran, Ting-Wei Chang, Wei-Chen Chiu, Ching-Chun Huang
Auto-TLDR; Disentangling and Exchanging Network for Depth Completion
Vacant Parking Space Detection Based on Task Consistency and Reinforcement Learning
Manh Hung Nguyen, Tzu-Yin Chao, Ching-Chun Huang
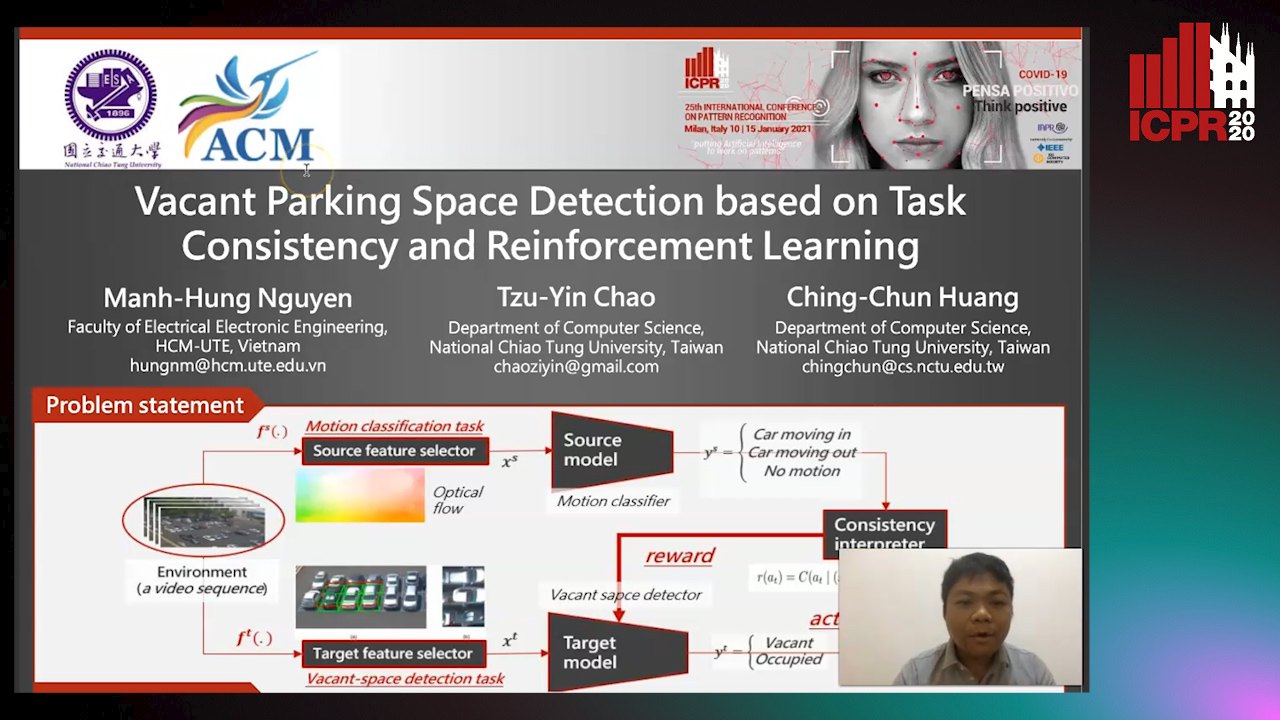
Auto-TLDR; Vacant Space Detection via Semantic Consistency Learning
Abstract Slides Poster Similar