DEN: Disentangling and Exchanging Network for Depth Completion
You-Feng Wu,
Vu-Hoang Tran,
Ting-Wei Chang,
Wei-Chen Chiu,
Ching-Chun Huang
Auto-TLDR; Disentangling and Exchanging Network for Depth Completion
Similar papers
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Towards Efficient 3D Point Cloud Scene Completion Via Novel Depth View Synthesis
Haiyan Wang, Liang Yang, Xuejian Rong, Ying-Li Tian

Auto-TLDR; 3D Point Cloud Completion with Depth View Synthesis and Depth View synthesis
Delivering Meaningful Representation for Monocular Depth Estimation
Doyeon Kim, Donggyu Joo, Junmo Kim

Auto-TLDR; Monocular Depth Estimation by Bridging the Context between Encoding and Decoding
Abstract Slides Poster Similar
Dynamic Guided Network for Monocular Depth Estimation
Xiaoxia Xing, Yinghao Cai, Yiping Yang, Dayong Wen

Auto-TLDR; DGNet: Dynamic Guidance Upsampling for Self-attention-Decoding for Monocular Depth Estimation
Abstract Slides Poster Similar
Cycle-Consistent Adversarial Networks and Fast Adaptive Bi-Dimensional Empirical Mode Decomposition for Style Transfer
Elissavet Batziou, Petros Alvanitopoulos, Konstantinos Ioannidis, Ioannis Patras, Stefanos Vrochidis, Ioannis Kompatsiaris
Auto-TLDR; FABEMD: Fast and Adaptive Bidimensional Empirical Mode Decomposition for Style Transfer on Images
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
Edge-Aware Monocular Dense Depth Estimation with Morphology
Zhi Li, Xiaoyang Zhu, Haitao Yu, Qi Zhang, Yongshi Jiang

Auto-TLDR; Spatio-Temporally Smooth Dense Depth Maps Using Only a CPU
Abstract Slides Poster Similar
Unsupervised Multi-Task Domain Adaptation
Auto-TLDR; Unsupervised Domain Adaptation with Multi-task Learning for Image Recognition
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Boundary Guided Image Translation for Pose Estimation from Ultra-Low Resolution Thermal Sensor
Kohei Kurihara, Tianren Wang, Teng Zhang, Brian Carrington Lovell
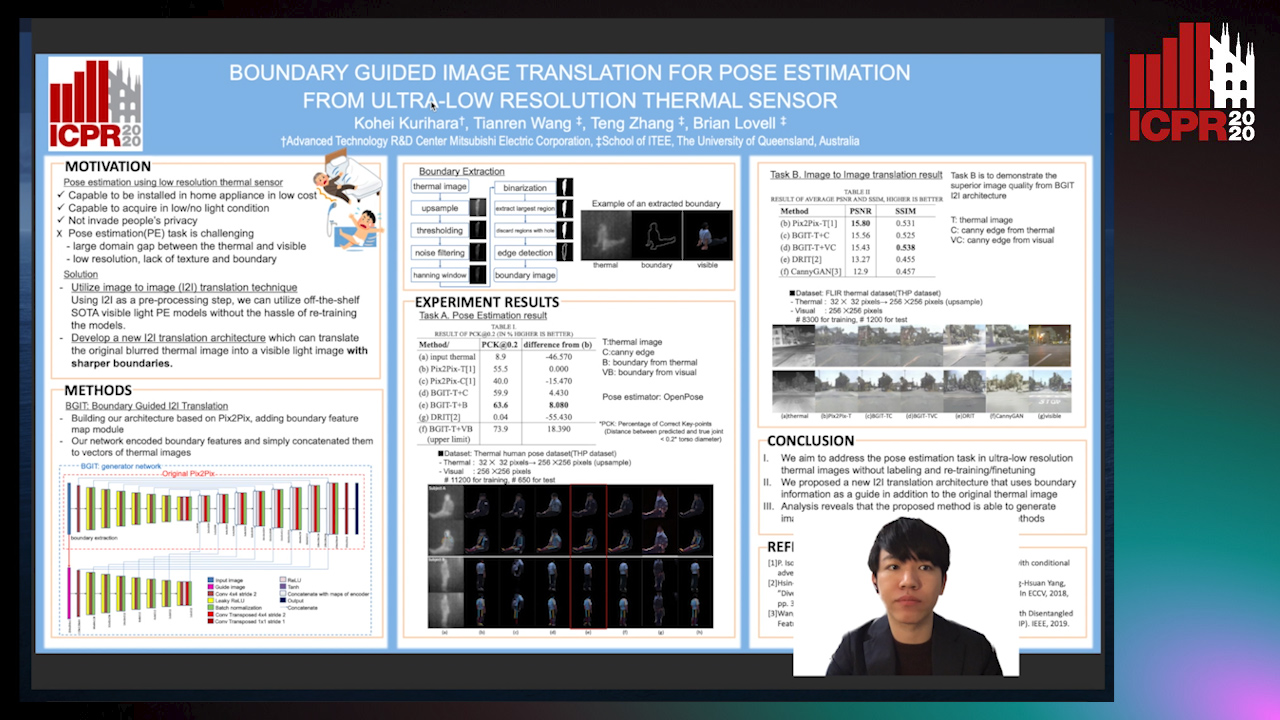
Auto-TLDR; Pose Estimation on Low-Resolution Thermal Images Using Image-to-Image Translation Architecture
Abstract Slides Poster Similar
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Semantic-Guided Inpainting Network for Complex Urban Scenes Manipulation
Pierfrancesco Ardino, Yahui Liu, Elisa Ricci, Bruno Lepri, Marco De Nadai

Auto-TLDR; Semantic-Guided Inpainting of Complex Urban Scene Using Semantic Segmentation and Generation
Abstract Slides Poster Similar
Exemplar Guided Cross-Spectral Face Hallucination Via Mutual Information Disentanglement
Haoxue Wu, Huaibo Huang, Aijing Yu, Jie Cao, Zhen Lei, Ran He
Auto-TLDR; Exemplar Guided Cross-Spectral Face Hallucination with Structural Representation Learning
Abstract Slides Poster Similar
Learning Interpretable Representation for 3D Point Clouds
Feng-Guang Su, Ci-Siang Lin, Yu-Chiang Frank Wang
Auto-TLDR; Disentangling Body-type and Pose Information from 3D Point Clouds Using Adversarial Learning
Abstract Slides Poster Similar
DAPC: Domain Adaptation People Counting Via Style-Level Transfer Learning and Scene-Aware Estimation
Na Jiang, Xingsen Wen, Zhiping Shi
Auto-TLDR; Domain Adaptation People counting via Style-Level Transfer Learning and Scene-Aware Estimation
Abstract Slides Poster Similar
Local Facial Attribute Transfer through Inpainting
Ricard Durall, Franz-Josef Pfreundt, Janis Keuper
Auto-TLDR; Attribute Transfer Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
Cross-Domain Semantic Segmentation of Urban Scenes Via Multi-Level Feature Alignment
Bin Zhang, Shengjie Zhao, Rongqing Zhang
Auto-TLDR; Cross-Domain Semantic Segmentation Using Generative Adversarial Networks
Abstract Slides Poster Similar
Detail Fusion GAN: High-Quality Translation for Unpaired Images with GAN-Based Data Augmentation
Ling Li, Yaochen Li, Chuan Wu, Hang Dong, Peilin Jiang, Fei Wang

Auto-TLDR; Data Augmentation with GAN-based Generative Adversarial Network
Abstract Slides Poster Similar
Ordinal Depth Classification Using Region-Based Self-Attention
Minh Hieu Phan, Son Lam Phung, Abdesselam Bouzerdoum

Auto-TLDR; Region-based Self-Attention for Multi-scale Depth Estimation from a Single 2D Image
Abstract Slides Poster Similar
MixedFusion: 6D Object Pose Estimation from Decoupled RGB-Depth Features
Hangtao Feng, Lu Zhang, Xu Yang, Zhiyong Liu

Auto-TLDR; MixedFusion: Combining Color and Point Clouds for 6D Pose Estimation
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
Efficient Shadow Detection and Removal Using Synthetic Data with Domain Adaptation
Rui Guo, Babajide Ayinde, Hao Sun
Auto-TLDR; Shadow Detection and Removal with Domain Adaptation and Synthetic Image Database
EdgeNet: Semantic Scene Completion from a Single RGB-D Image
Aloisio Dourado, Teofilo De Campos, Adrian Hilton, Hansung Kim

Auto-TLDR; Semantic Scene Completion using 3D Depth and RGB Information
Abstract Slides Poster Similar
Deep Reinforcement Learning for Autonomous Driving by Transferring Visual Features
Hongli Zhou, Guanwen Zhang, Wei Zhou
Auto-TLDR; Deep Reinforcement Learning for Autonomous Driving by Transferring Visual Features
Abstract Slides Poster Similar
Multi-Domain Image-To-Image Translation with Adaptive Inference Graph
The Phuc Nguyen, Stéphane Lathuiliere, Elisa Ricci
Auto-TLDR; Adaptive Graph Structure for Multi-Domain Image-to-Image Translation
Abstract Slides Poster Similar
Dual-MTGAN: Stochastic and Deterministic Motion Transfer for Image-To-Video Synthesis
Fu-En Yang, Jing-Cheng Chang, Yuan-Hao Lee, Yu-Chiang Frank Wang
Auto-TLDR; Dual Motion Transfer GAN for Convolutional Neural Networks
Abstract Slides Poster Similar
Shape Consistent 2D Keypoint Estimation under Domain Shift
Levi Vasconcelos, Massimiliano Mancini, Davide Boscaini, Barbara Caputo, Elisa Ricci

Auto-TLDR; Deep Adaptation for Keypoint Prediction under Domain Shift
Abstract Slides Poster Similar
FastCompletion: A Cascade Network with Multiscale Group-Fused Inputs for Real-Time Depth Completion
Ang Li, Zejian Yuan, Yonggen Ling, Wanchao Chi, Shenghao Zhang, Chong Zhang
Auto-TLDR; Efficient Depth Completion with Clustered Hourglass Networks
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
High Resolution Face Age Editing
Xu Yao, Gilles Puy, Alasdair Newson, Yann Gousseau, Pierre Hellier
Auto-TLDR; An Encoder-Decoder Architecture for Face Age editing on High Resolution Images
Abstract Slides Poster Similar
Augmented Cyclic Consistency Regularization for Unpaired Image-To-Image Translation
Takehiko Ohkawa, Naoto Inoue, Hirokatsu Kataoka, Nakamasa Inoue
Auto-TLDR; Augmented Cyclic Consistency Regularization for Unpaired Image-to-Image Translation
Abstract Slides Poster Similar
SECI-GAN: Semantic and Edge Completion for Dynamic Objects Removal
Francesco Pinto, Andrea Romanoni, Matteo Matteucci, Phil Torr
Auto-TLDR; SECI-GAN: Semantic and Edge Conditioned Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
SIDGAN: Single Image Dehazing without Paired Supervision
Pan Wei, Xin Wang, Lei Wang, Ji Xiang, Zihan Wang
Auto-TLDR; DehazeGAN: An End-to-End Generative Adversarial Network for Image Dehazing
Abstract Slides Poster Similar
Improving Visual Relation Detection Using Depth Maps
Sahand Sharifzadeh, Sina Moayed Baharlou, Max Berrendorf, Rajat Koner, Volker Tresp
Auto-TLDR; Exploiting Depth Maps for Visual Relation Detection
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
The Aleatoric Uncertainty Estimation Using a Separate Formulation with Virtual Residuals
Takumi Kawashima, Qing Yu, Akari Asai, Daiki Ikami, Kiyoharu Aizawa
Auto-TLDR; Aleatoric Uncertainty Estimation in Regression Problems
UDBNET: Unsupervised Document Binarization Network Via Adversarial Game
Amandeep Kumar, Shuvozit Ghose, Pinaki Nath Chowdhury, Partha Pratim Roy, Umapada Pal
Auto-TLDR; Three-player Min-max Adversarial Game for Unsupervised Document Binarization
Abstract Slides Poster Similar
PEAN: 3D Hand Pose Estimation Adversarial Network
Linhui Sun, Yifan Zhang, Jing Lu, Jian Cheng, Hanqing Lu
Auto-TLDR; PEAN: 3D Hand Pose Estimation with Adversarial Learning Framework
Abstract Slides Poster Similar
Foreground-Focused Domain Adaption for Object Detection
Auto-TLDR; Unsupervised Domain Adaptation for Unsupervised Object Detection
A GAN-Based Blind Inpainting Method for Masonry Wall Images
Yahya Ibrahim, Balázs Nagy, Csaba Benedek
Auto-TLDR; An End-to-End Blind Inpainting Algorithm for Masonry Wall Images
Abstract Slides Poster Similar
RefiNet: 3D Human Pose Refinement with Depth Maps
Andrea D'Eusanio, Stefano Pini, Guido Borghi, Roberto Vezzani, Rita Cucchiara

Auto-TLDR; RefiNet: A Multi-stage Framework for 3D Human Pose Estimation
GarmentGAN: Photo-Realistic Adversarial Fashion Transfer
Amir Hossein Raffiee, Michael Sollami

Auto-TLDR; GarmentGAN: A Generative Adversarial Network for Image-Based Garment Transfer
Abstract Slides Poster Similar
Learning Low-Shot Generative Networks for Cross-Domain Data
Hsuan-Kai Kao, Cheng-Che Lee, Wei-Chen Chiu
Auto-TLDR; Learning Generators for Cross-Domain Data under Low-Shot Learning
Abstract Slides Poster Similar
Adaptive Image Compression Using GAN Based Semantic-Perceptual Residual Compensation
Ruojing Wang, Zitang Sun, Sei-Ichiro Kamata, Weili Chen
Auto-TLDR; Adaptive Image Compression using GAN based Semantic-Perceptual Residual Compensation
Abstract Slides Poster Similar
Manual-Label Free 3D Detection Via an Open-Source Simulator
Zhen Yang, Chi Zhang, Zhaoxiang Zhang, Huiming Guo

Auto-TLDR; DA-VoxelNet: A Novel Domain Adaptive VoxelNet for LIDAR-based 3D Object Detection
Abstract Slides Poster Similar
Free-Form Image Inpainting Via Contrastive Attention Network
Xin Ma, Xiaoqiang Zhou, Huaibo Huang, Zhenhua Chai, Xiaolin Wei, Ran He
Auto-TLDR; Self-supervised Siamese inference for image inpainting