Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni,
Luca Bergamini,
Andrea Palazzi,
Simone Calderara,
Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Similar papers
Shape Consistent 2D Keypoint Estimation under Domain Shift
Levi Vasconcelos, Massimiliano Mancini, Davide Boscaini, Barbara Caputo, Elisa Ricci

Auto-TLDR; Deep Adaptation for Keypoint Prediction under Domain Shift
Abstract Slides Poster Similar
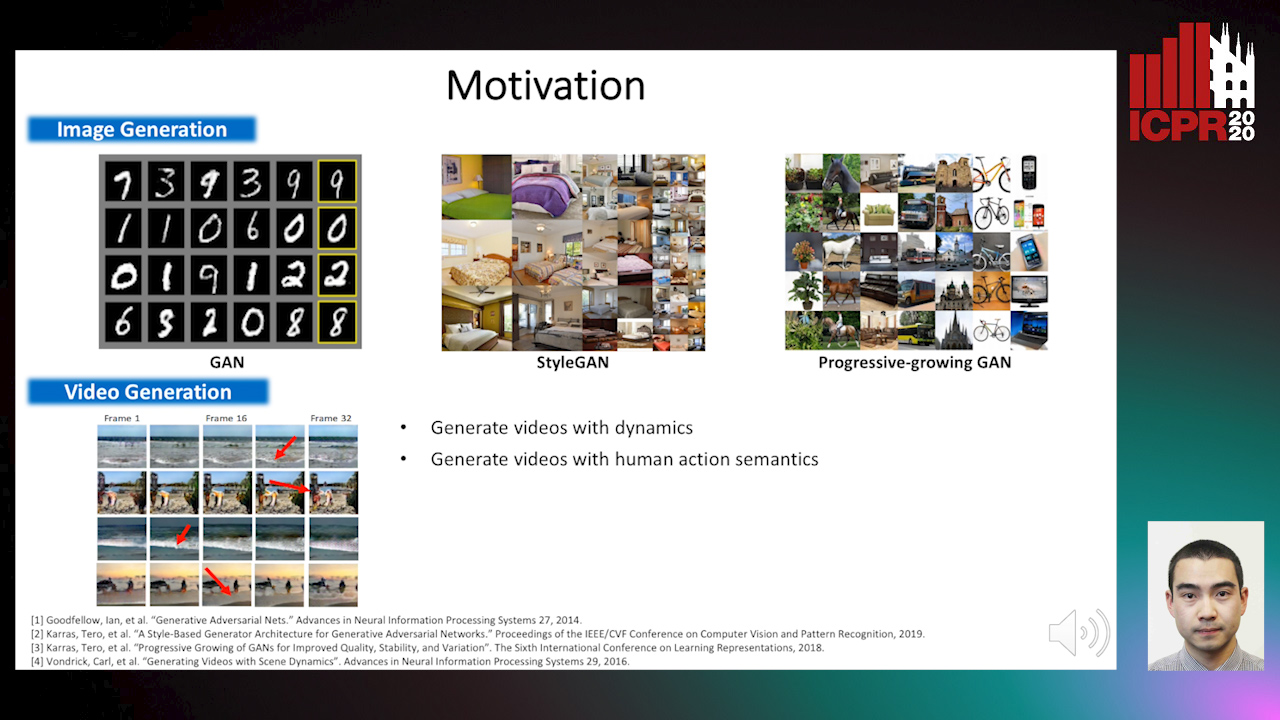
Dual-MTGAN: Stochastic and Deterministic Motion Transfer for Image-To-Video Synthesis
Fu-En Yang, Jing-Cheng Chang, Yuan-Hao Lee, Yu-Chiang Frank Wang
Auto-TLDR; Dual Motion Transfer GAN for Convolutional Neural Networks
Abstract Slides Poster Similar
Semantic-Guided Inpainting Network for Complex Urban Scenes Manipulation
Pierfrancesco Ardino, Yahui Liu, Elisa Ricci, Bruno Lepri, Marco De Nadai

Auto-TLDR; Semantic-Guided Inpainting of Complex Urban Scene Using Semantic Segmentation and Generation
Abstract Slides Poster Similar
Learning to Take Directions One Step at a Time
Qiyang Hu, Adrian Wälchli, Tiziano Portenier, Matthias Zwicker, Paolo Favaro
Auto-TLDR; Generating a Sequence of Motion Strokes from a Single Image
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
GarmentGAN: Photo-Realistic Adversarial Fashion Transfer
Amir Hossein Raffiee, Michael Sollami

Auto-TLDR; GarmentGAN: A Generative Adversarial Network for Image-Based Garment Transfer
Abstract Slides Poster Similar
The Role of Cycle Consistency for Generating Better Human Action Videos from a Single Frame
Auto-TLDR; Generating Videos with Human Action Semantics using Cycle Constraints
Abstract Slides Poster Similar
DeepBEV: A Conditional Adversarial Network for Bird’s Eye View Generation
Auto-TLDR; A Generative Adversarial Network for Semantic Object Representation in Autonomous Vehicles
Abstract Slides Poster Similar
Local Facial Attribute Transfer through Inpainting
Ricard Durall, Franz-Josef Pfreundt, Janis Keuper
Auto-TLDR; Attribute Transfer Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
Let's Play Music: Audio-Driven Performance Video Generation
Hao Zhu, Yi Li, Feixia Zhu, Aihua Zheng, Ran He
Auto-TLDR; APVG: Audio-driven Performance Video Generation Using Structured Temporal UNet
Abstract Slides Poster Similar
SECI-GAN: Semantic and Edge Completion for Dynamic Objects Removal
Francesco Pinto, Andrea Romanoni, Matteo Matteucci, Phil Torr
Auto-TLDR; SECI-GAN: Semantic and Edge Conditioned Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
VITON-GT: An Image-Based Virtual Try-On Model with Geometric Transformations
Matteo Fincato, Federico Landi, Marcella Cornia, Fabio Cesari, Rita Cucchiara
Auto-TLDR; VITON-GT: An Image-based Virtual Try-on Architecture for Fashion Catalogs
Abstract Slides Poster Similar
Mutual Information Based Method for Unsupervised Disentanglement of Video Representation
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; MIPAE: Mutual Information Predictive Auto-Encoder for Video Prediction
Abstract Slides Poster Similar
Reducing the Variance of Variational Estimates of Mutual Information by Limiting the Critic's Hypothesis Space to RKHS
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; Mutual Information Estimation from Variational Lower Bounds Using a Critic's Hypothesis Space
Motion-Supervised Co-Part Segmentation
Aliaksandr Siarohin, Subhankar Roy, Stéphane Lathuiliere, Sergey Tulyakov, Elisa Ricci, Nicu Sebe
Auto-TLDR; Self-supervised Co-Part Segmentation Using Motion Information from Videos
Boundary Guided Image Translation for Pose Estimation from Ultra-Low Resolution Thermal Sensor
Kohei Kurihara, Tianren Wang, Teng Zhang, Brian Carrington Lovell
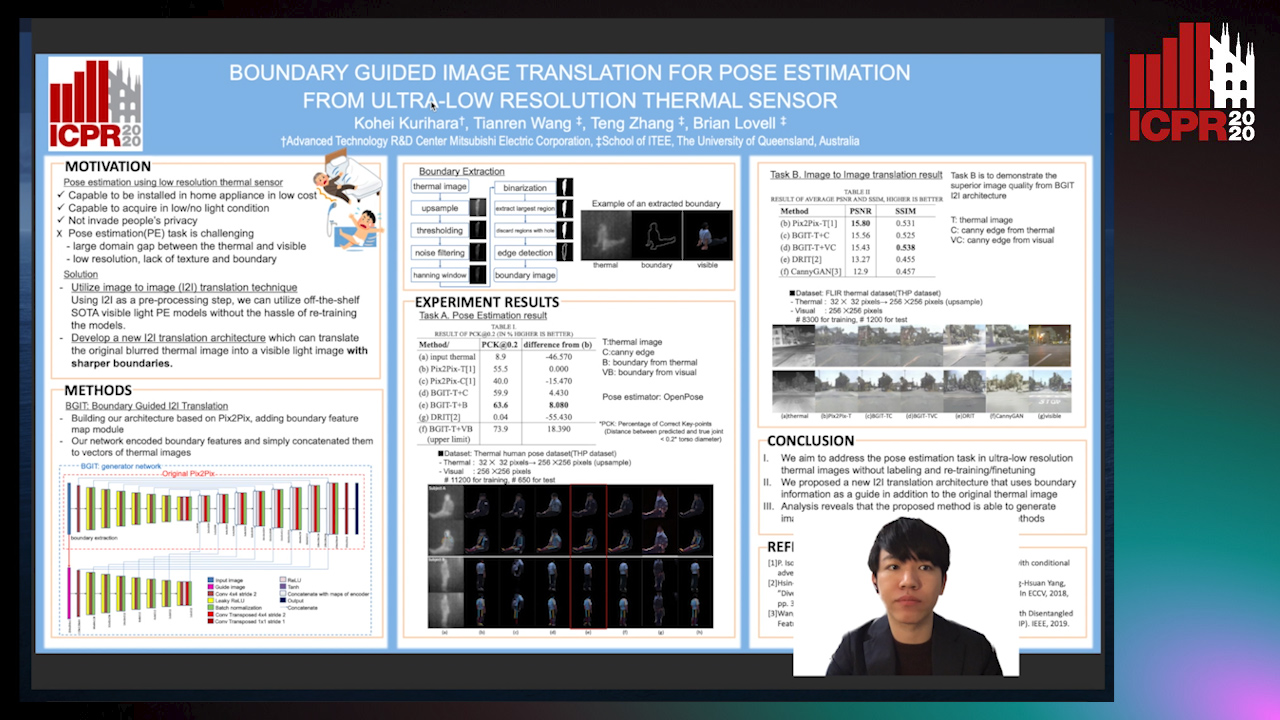
Auto-TLDR; Pose Estimation on Low-Resolution Thermal Images Using Image-to-Image Translation Architecture
Abstract Slides Poster Similar
AG-GAN: An Attentive Group-Aware GAN for Pedestrian Trajectory Prediction
Yue Song, Niccolò Bisagno, Syed Zohaib Hassan, Nicola Conci
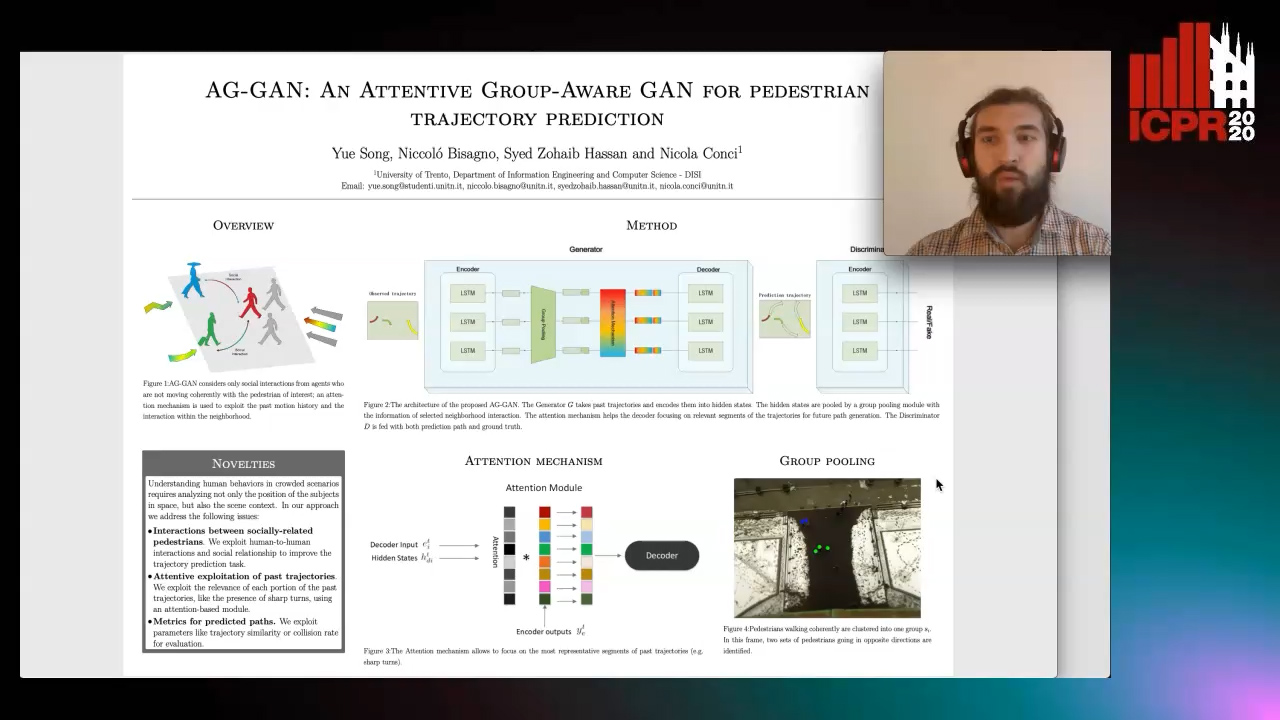
Auto-TLDR; An attentive group-aware GAN for motion prediction in crowded scenarios
Abstract Slides Poster Similar
Learning Disentangled Representations for Identity Preserving Surveillance Face Camouflage
Jingzhi Li, Lutong Han, Hua Zhang, Xiaoguang Han, Jingguo Ge, Xiaochu Cao
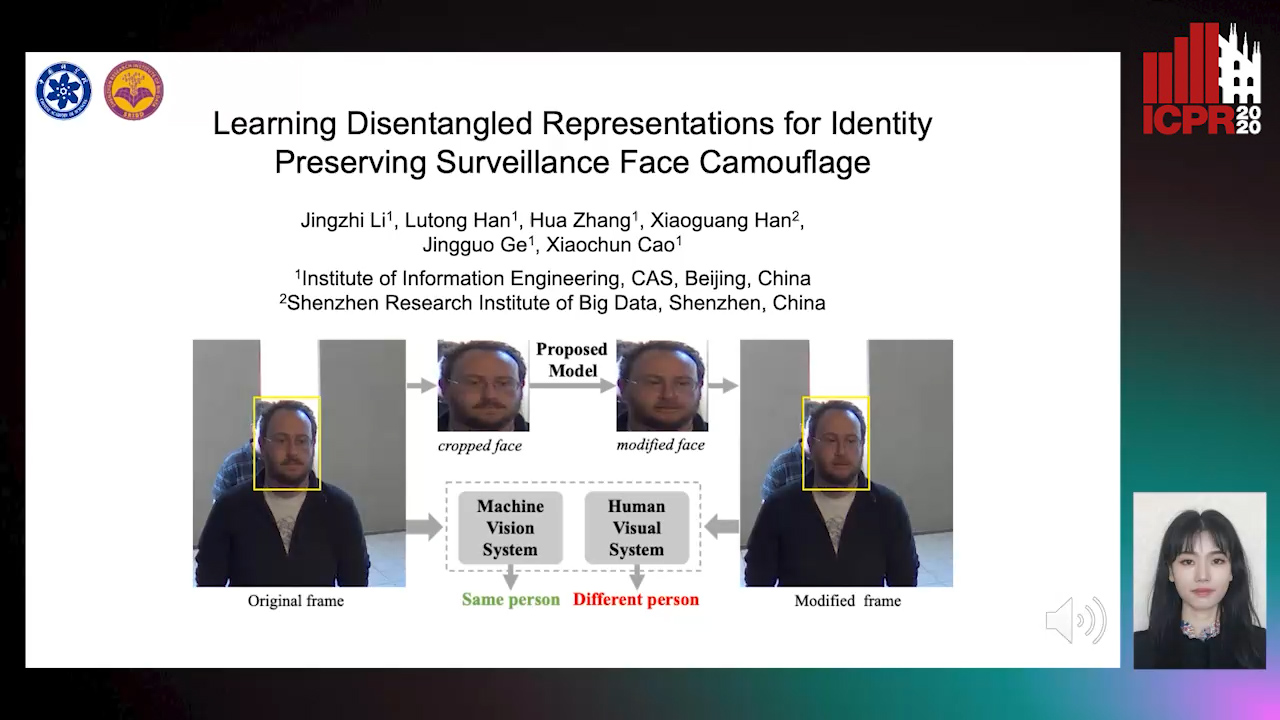
Auto-TLDR; Individual Face Privacy under Surveillance Scenario with Multi-task Loss Function
Free-Form Image Inpainting Via Contrastive Attention Network
Xin Ma, Xiaoqiang Zhou, Huaibo Huang, Zhenhua Chai, Xiaolin Wei, Ran He
Auto-TLDR; Self-supervised Siamese inference for image inpainting
UCCTGAN: Unsupervised Clothing Color Transformation Generative Adversarial Network
Shuming Sun, Xiaoqiang Li, Jide Li
Auto-TLDR; An Unsupervised Clothing Color Transformation Generative Adversarial Network
Abstract Slides Poster Similar
A Grid-Based Representation for Human Action Recognition
Soufiane Lamghari, Guillaume-Alexandre Bilodeau, Nicolas Saunier

Auto-TLDR; GRAR: Grid-based Representation for Action Recognition in Videos
Abstract Slides Poster Similar
What and How? Jointly Forecasting Human Action and Pose
Yanjun Zhu, Yanxia Zhang, Qiong Liu, Andreas Girgensohn

Auto-TLDR; Forecasting Human Actions and Motion Trajectories with Joint Action Classification and Pose Regression
Abstract Slides Poster Similar
Transformer Networks for Trajectory Forecasting
Francesco Giuliari, Hasan Irtiza, Marco Cristani, Fabio Galasso
Auto-TLDR; TransformerNetworks for Trajectory Prediction of People Interactions
Abstract Slides Poster Similar
Residual Learning of Video Frame Interpolation Using Convolutional LSTM
Auto-TLDR; Video Frame Interpolation Using Residual Learning and Convolutional LSTMs
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Talking Face Generation Via Learning Semantic and Temporal Synchronous Landmarks
Aihua Zheng, Feixia Zhu, Hao Zhu, Mandi Luo, Ran He
Auto-TLDR; A semantic and temporal synchronous landmark learning method for talking face generation
Abstract Slides Poster Similar
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar
Unsupervised Face Manipulation Via Hallucination
Keerthy Kusumam, Enrique Sanchez, Georgios Tzimiropoulos
Auto-TLDR; Unpaired Face Image Manipulation using Autoencoders
Abstract Slides Poster Similar
Anomaly Detection, Localization and Classification for Railway Inspection
Riccardo Gasparini, Andrea D'Eusanio, Guido Borghi, Stefano Pini, Giuseppe Scaglione, Simone Calderara, Eugenio Fedeli, Rita Cucchiara

Auto-TLDR; Anomaly Detection and Localization using thermal images in the lowlight environment
Novel View Synthesis from a 6-DoF Pose by Two-Stage Networks
Xiang Guo, Bo Li, Yuchao Dai, Tongxin Zhang, Hui Deng
Auto-TLDR; Novel View Synthesis from a 6-DoF Pose Using Generative Adversarial Network
Abstract Slides Poster Similar
Exploring Severe Occlusion: Multi-Person 3D Pose Estimation with Gated Convolution
Renshu Gu, Gaoang Wang, Jenq-Neng Hwang

Auto-TLDR; 3D Human Pose Estimation for Multi-Human Videos with Occlusion
Cycle-Consistent Adversarial Networks and Fast Adaptive Bi-Dimensional Empirical Mode Decomposition for Style Transfer
Elissavet Batziou, Petros Alvanitopoulos, Konstantinos Ioannidis, Ioannis Patras, Stefanos Vrochidis, Ioannis Kompatsiaris
Auto-TLDR; FABEMD: Fast and Adaptive Bidimensional Empirical Mode Decomposition for Style Transfer on Images
Abstract Slides Poster Similar
Cascade Attention Guided Residue Learning GAN for Cross-Modal Translation
Bin Duan, Wei Wang, Hao Tang, Hugo Latapie, Yan Yan
Auto-TLDR; Cascade Attention-Guided Residue GAN for Cross-modal Audio-Visual Learning
Abstract Slides Poster Similar
Deep Photo Relighting by Integrating Both 2D and 3D Lighting Information
Takashi Machida, Satoru Nakanishi
Auto-TLDR; DPR: Deep Photorelighting for Image Detection/Classification and Data Augmentation
Abstract Slides Poster Similar
Deep Realistic Novel View Generation for City-Scale Aerial Images
Koundinya Nouduri, Ke Gao, Joshua Fraser, Shizeng Yao, Hadi Aliakbarpour, Filiz Bunyak, Kannappan Palaniappan
Auto-TLDR; End-to-End 3D Voxel Renderer for Multi-View Stereo Data Generation and Evaluation
Abstract Slides Poster Similar
Self-Supervised Learning of Dynamic Representations for Static Images
Siyang Song, Enrique Sanchez, Linlin Shen, Michel Valstar

Auto-TLDR; Facial Action Unit Intensity Estimation and Affect Estimation from Still Images with Multiple Temporal Scale
Abstract Slides Poster Similar
A GAN-Based Blind Inpainting Method for Masonry Wall Images
Yahya Ibrahim, Balázs Nagy, Csaba Benedek
Auto-TLDR; An End-to-End Blind Inpainting Algorithm for Masonry Wall Images
Abstract Slides Poster Similar
JUMPS: Joints Upsampling Method for Pose Sequences
Lucas Mourot, Francois Le Clerc, Cédric Thébault, Pierre Hellier
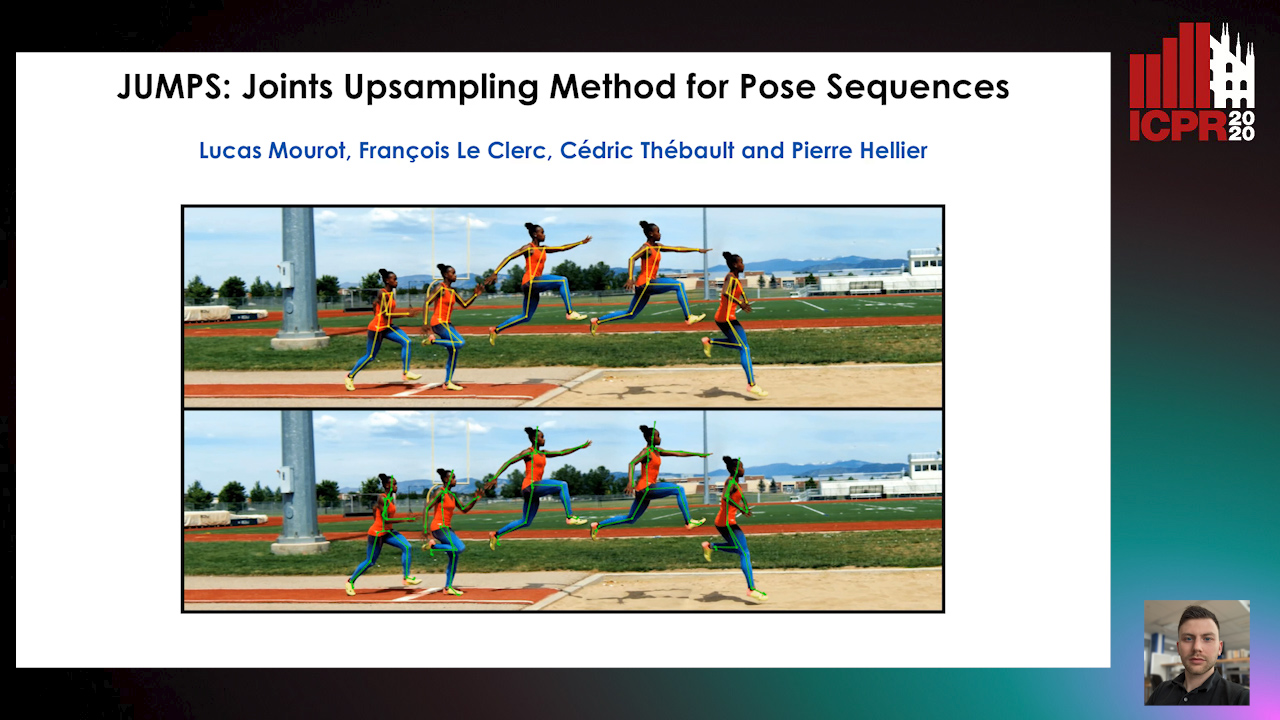
Auto-TLDR; JUMPS: Increasing the Number of Joints in 2D Pose Estimation and Recovering Occluded or Missing Joints
Abstract Slides Poster Similar
DAG-Net: Double Attentive Graph Neural Network for Trajectory Forecasting
Alessio Monti, Alessia Bertugli, Simone Calderara, Rita Cucchiara
Auto-TLDR; Recurrent Generative Model for Multi-modal Human Motion Behaviour in Urban Environments
Abstract Slides Poster Similar
Towards Efficient 3D Point Cloud Scene Completion Via Novel Depth View Synthesis
Haiyan Wang, Liang Yang, Xuejian Rong, Ying-Li Tian

Auto-TLDR; 3D Point Cloud Completion with Depth View Synthesis and Depth View synthesis
Quantifying the Use of Domain Randomization
Mohammad Ani, Hector Basevi, Ales Leonardis
Auto-TLDR; Evaluating Domain Randomization for Synthetic Image Generation by directly measuring the difference between realistic and synthetic data distributions
Abstract Slides Poster Similar
Disentangle, Assemble, and Synthesize: Unsupervised Learning to Disentangle Appearance and Location
Hiroaki Aizawa, Hirokatsu Kataoka, Yutaka Satoh, Kunihito Kato
Auto-TLDR; Generative Adversarial Networks with Structural Constraint for controllability of latent space
Abstract Slides Poster Similar
Robust Pedestrian Detection in Thermal Imagery Using Synthesized Images
My Kieu, Lorenzo Berlincioni, Leonardo Galteri, Marco Bertini, Andrew Bagdanov, Alberto Del Bimbo

Auto-TLDR; Improving Pedestrian Detection in the thermal domain using Generative Adversarial Network
Abstract Slides Poster Similar
An Unsupervised Approach towards Varying Human Skin Tone Using Generative Adversarial Networks
Debapriya Roy, Diganta Mukherjee, Bhabatosh Chanda
Auto-TLDR; Unsupervised Skin Tone Change Using Augmented Reality Based Models
Abstract Slides Poster Similar
A Quantitative Evaluation Framework of Video De-Identification Methods
Sathya Bursic, Alessandro D'Amelio, Marco Granato, Giuliano Grossi, Raffaella Lanzarotti
Auto-TLDR; Face de-identification using photo-reality and facial expressions
Abstract Slides Poster Similar
Unsupervised 3D Human Pose Estimation in Multi-view-multi-pose Video
Cheng Sun, Diego Thomas, Hiroshi Kawasaki
Auto-TLDR; Unsupervised 3D Human Pose Estimation from 2D Videos Using Generative Adversarial Network
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar