Jenq-Neng Hwang
Papers from this author
CSpA-DN: Channel and Spatial Attention Dense Network for Fusing PET and MRI Images
Bicao Li, Zhoufeng Liu, Shan Gao, Jenq-Neng Hwang, Jun Sun, Zongmin Wang
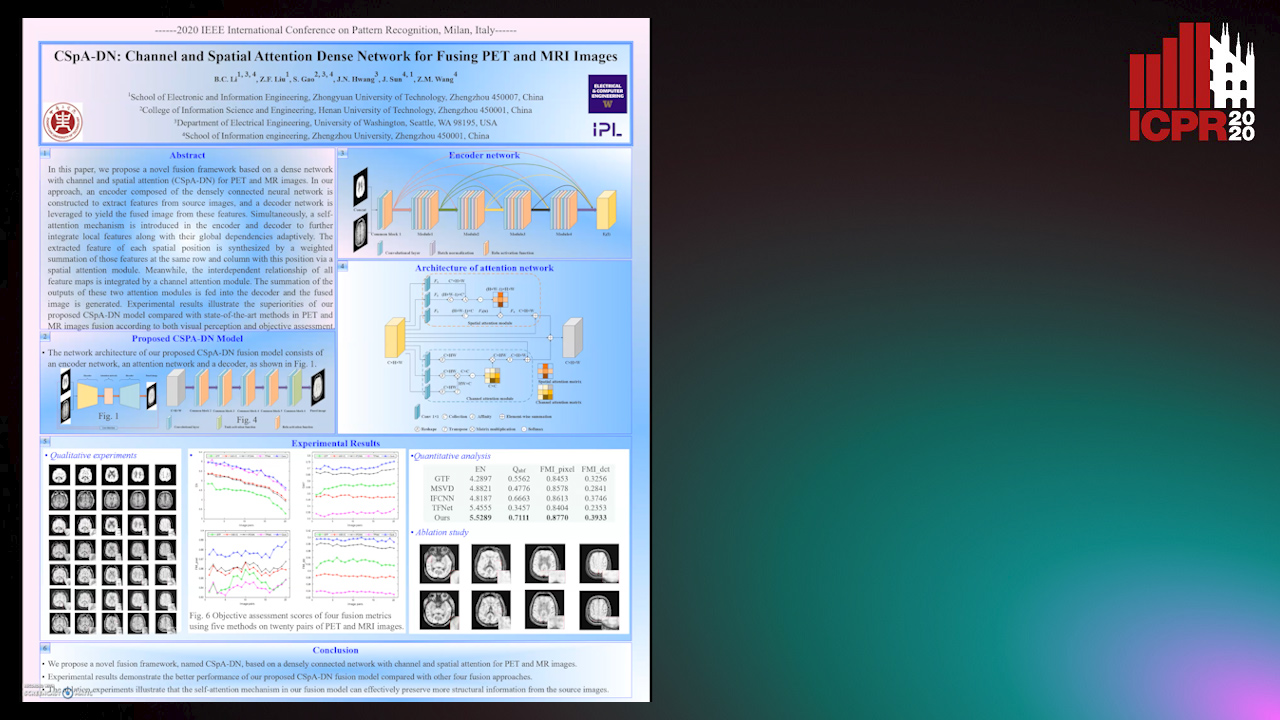
Auto-TLDR; CSpA-DN: Unsupervised Fusion of PET and MR Images with Channel and Spatial Attention
Abstract Slides Poster Similar
Exploring Severe Occlusion: Multi-Person 3D Pose Estimation with Gated Convolution
Renshu Gu, Gaoang Wang, Jenq-Neng Hwang

Auto-TLDR; 3D Human Pose Estimation for Multi-Human Videos with Occlusion