Exploring Severe Occlusion: Multi-Person 3D Pose Estimation with Gated Convolution
Renshu Gu,
Gaoang Wang,
Jenq-Neng Hwang

Auto-TLDR; 3D Human Pose Estimation for Multi-Human Videos with Occlusion
Similar papers
Orthographic Projection Linear Regression for Single Image 3D Human Pose Estimation
Yahui Zhang, Shaodi You, Theo Gevers

Auto-TLDR; A Deep Neural Network for 3D Human Pose Estimation from a Single 2D Image in the Wild
Abstract Slides Poster Similar
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar
Unsupervised 3D Human Pose Estimation in Multi-view-multi-pose Video
Cheng Sun, Diego Thomas, Hiroshi Kawasaki
Auto-TLDR; Unsupervised 3D Human Pose Estimation from 2D Videos Using Generative Adversarial Network
Abstract Slides Poster Similar
A Multi-Task Neural Network for Action Recognition with 3D Key-Points
Rongxiao Tang, Wang Luyang, Zhenhua Guo
Auto-TLDR; Multi-task Neural Network for Action Recognition and 3D Human Pose Estimation
Abstract Slides Poster Similar
JUMPS: Joints Upsampling Method for Pose Sequences
Lucas Mourot, Francois Le Clerc, Cédric Thébault, Pierre Hellier
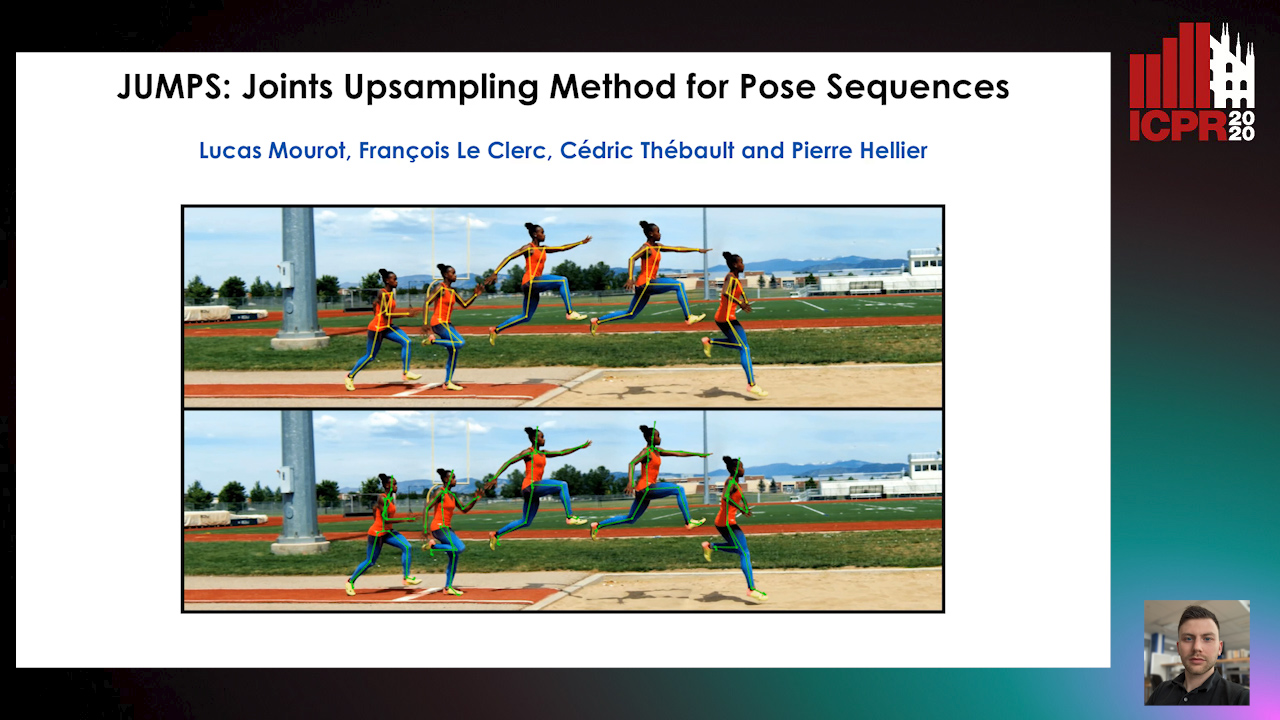
Auto-TLDR; JUMPS: Increasing the Number of Joints in 2D Pose Estimation and Recovering Occluded or Missing Joints
Abstract Slides Poster Similar
StrongPose: Bottom-up and Strong Keypoint Heat Map Based Pose Estimation
Auto-TLDR; StrongPose: A bottom-up box-free approach for human pose estimation and action recognition
Abstract Slides Poster Similar
Occlusion-Tolerant and Personalized 3D Human Pose Estimation in RGB Images

Auto-TLDR; Real-Time 3D Human Pose Estimation in BVH using Inverse Kinematics Solver and Neural Networks
What and How? Jointly Forecasting Human Action and Pose
Yanjun Zhu, Yanxia Zhang, Qiong Liu, Andreas Girgensohn

Auto-TLDR; Forecasting Human Actions and Motion Trajectories with Joint Action Classification and Pose Regression
Abstract Slides Poster Similar
A Grid-Based Representation for Human Action Recognition
Soufiane Lamghari, Guillaume-Alexandre Bilodeau, Nicolas Saunier

Auto-TLDR; GRAR: Grid-based Representation for Action Recognition in Videos
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
RefiNet: 3D Human Pose Refinement with Depth Maps
Andrea D'Eusanio, Stefano Pini, Guido Borghi, Roberto Vezzani, Rita Cucchiara

Auto-TLDR; RefiNet: A Multi-stage Framework for 3D Human Pose Estimation
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
Rotational Adjoint Methods for Learning-Free 3D Human Pose Estimation from IMU Data
Caterina Emilia Agelide Buizza, Yiannis Demiris

Auto-TLDR; Learning-free 3D Human Pose Estimation from Inertial Measurement Unit Data
PEAN: 3D Hand Pose Estimation Adversarial Network
Linhui Sun, Yifan Zhang, Jing Lu, Jian Cheng, Hanqing Lu
Auto-TLDR; PEAN: 3D Hand Pose Estimation with Adversarial Learning Framework
Abstract Slides Poster Similar
P2 Net: Augmented Parallel-Pyramid Net for Attention Guided Pose Estimation
Luanxuan Hou, Jie Cao, Yuan Zhao, Haifeng Shen, Jian Tang, Ran He
Auto-TLDR; Parallel-Pyramid Net with Partial Attention for Human Pose Estimation
Abstract Slides Poster Similar
LFIR2Pose: Pose Estimation from an Extremely Low-Resolution FIR Image Sequence
Saki Iwata, Yasutomo Kawanishi, Daisuke Deguchi, Ichiro Ide, Hiroshi Murase, Tomoyoshi Aizawa
Auto-TLDR; LFIR2Pose: Human Pose Estimation from a Low-Resolution Far-InfraRed Image Sequence
Abstract Slides Poster Similar
Simple Multi-Resolution Representation Learning for Human Pose Estimation
Trung Tran Quang, Van Giang Nguyen, Daeyoung Kim
Auto-TLDR; Multi-resolution Heatmap Learning for Human Pose Estimation
Abstract Slides Poster Similar
On the Robustness of 3D Human Pose Estimation
Zerui Chen, Yan Huang, Liang Wang
Auto-TLDR; Robustness of 3D Human Pose Estimation Methods to Adversarial Attacks
Pose-Based Body Language Recognition for Emotion and Psychiatric Symptom Interpretation
Zhengyuan Yang, Amanda Kay, Yuncheng Li, Wendi Cross, Jiebo Luo
Auto-TLDR; Body Language Based Emotion Recognition for Psychiatric Symptoms Prediction
Abstract Slides Poster Similar
DeepPear: Deep Pose Estimation and Action Recognition
Wen-Jiin Tsai, You-Ying Jhuang
Auto-TLDR; Human Action Recognition Using RGB Video Using 3D Human Pose and Appearance Features
Abstract Slides Poster Similar
Weakly Supervised Body Part Segmentation with Pose Based Part Priors
Zhengyuan Yang, Yuncheng Li, Linjie Yang, Ning Zhang, Jiebo Luo
Auto-TLDR; Weakly Supervised Body Part Segmentation Using Weak Labels
Tilting at Windmills: Data Augmentation for Deeppose Estimation Does Not Help with Occlusions
Rafal Pytel, Osman Semih Kayhan, Jan Van Gemert
Auto-TLDR; Targeted Keypoint and Body Part Occlusion Attacks for Human Pose Estimation
Abstract Slides Poster Similar
Learning Group Activities from Skeletons without Individual Action Labels
Fabio Zappardino, Tiberio Uricchio, Lorenzo Seidenari, Alberto Del Bimbo
Auto-TLDR; Lean Pose Only for Group Activity Recognition
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
Attention-Oriented Action Recognition for Real-Time Human-Robot Interaction
Ziyang Song, Ziyi Yin, Zejian Yuan, Chong Zhang, Wanchao Chi, Yonggen Ling, Shenghao Zhang
Auto-TLDR; Attention-Oriented Multi-Level Network for Action Recognition in Interaction Scenes
Abstract Slides Poster Similar
Inner Eye Canthus Localization for Human Body Temperature Screening
Claudio Ferrari, Lorenzo Berlincioni, Marco Bertini, Alberto Del Bimbo
Auto-TLDR; Automatic Localization of the Inner Eye Canthus in Thermal Face Images using 3D Morphable Face Model
Abstract Slides Poster Similar
Learning to Implicitly Represent 3D Human Body from Multi-Scale Features and Multi-View Images
Zhongguo Li, Magnus Oskarsson, Anders Heyden
Auto-TLDR; Reconstruction of 3D human bodies from multi-view images using multi-stage end-to-end neural networks
Abstract Slides Poster Similar
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
RWF-2000: An Open Large Scale Video Database for Violence Detection
Ming Cheng, Kunjing Cai, Ming Li
Auto-TLDR; Flow Gated Network for Violence Detection in Surveillance Cameras
Abstract Slides Poster Similar
Temporal Attention-Augmented Graph Convolutional Network for Efficient Skeleton-Based Human Action Recognition
Negar Heidari, Alexandros Iosifidis
Auto-TLDR; Temporal Attention Module for Efficient Graph Convolutional Network-based Action Recognition
Abstract Slides Poster Similar
Let's Play Music: Audio-Driven Performance Video Generation
Hao Zhu, Yi Li, Feixia Zhu, Aihua Zheng, Ran He
Auto-TLDR; APVG: Audio-driven Performance Video Generation Using Structured Temporal UNet
Abstract Slides Poster Similar
Efficient High-Resolution High-Level-Semantic Representation Learning for Human Pose Estimation
Auto-TLDR; Spatial enhanced separated temporal spatial convolutional neural network
Abstract Slides Poster Similar
MixedFusion: 6D Object Pose Estimation from Decoupled RGB-Depth Features
Hangtao Feng, Lu Zhang, Xu Yang, Zhiyong Liu

Auto-TLDR; MixedFusion: Combining Color and Point Clouds for 6D Pose Estimation
Abstract Slides Poster Similar
6D Pose Estimation with Correlation Fusion
Yi Cheng, Hongyuan Zhu, Ying Sun, Cihan Acar, Wei Jing, Yan Wu, Liyuan Li, Cheston Tan, Joo-Hwee Lim

Auto-TLDR; Intra- and Inter-modality Fusion for 6D Object Pose Estimation with Attention Mechanism
Abstract Slides Poster Similar
Edge-Aware Monocular Dense Depth Estimation with Morphology
Zhi Li, Xiaoyang Zhu, Haitao Yu, Qi Zhang, Yongshi Jiang

Auto-TLDR; Spatio-Temporally Smooth Dense Depth Maps Using Only a CPU
Abstract Slides Poster Similar
Shape Consistent 2D Keypoint Estimation under Domain Shift
Levi Vasconcelos, Massimiliano Mancini, Davide Boscaini, Barbara Caputo, Elisa Ricci

Auto-TLDR; Deep Adaptation for Keypoint Prediction under Domain Shift
Abstract Slides Poster Similar
The Role of Cycle Consistency for Generating Better Human Action Videos from a Single Frame
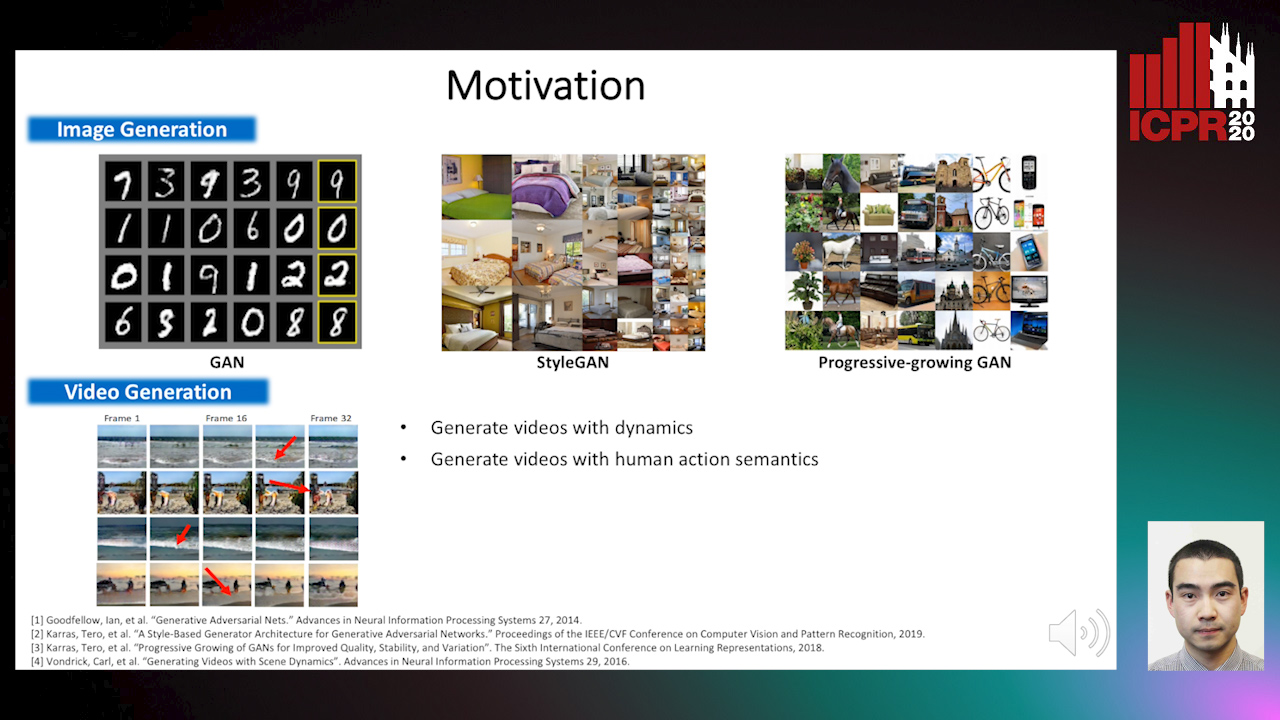
Auto-TLDR; Generating Videos with Human Action Semantics using Cycle Constraints
Abstract Slides Poster Similar
SECI-GAN: Semantic and Edge Completion for Dynamic Objects Removal
Francesco Pinto, Andrea Romanoni, Matteo Matteucci, Phil Torr
Auto-TLDR; SECI-GAN: Semantic and Edge Conditioned Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
A Two-Stream Recurrent Network for Skeleton-Based Human Interaction Recognition
Qianhui Men, Edmond S. L. Ho, Shum Hubert P. H., Howard Leung
Auto-TLDR; Two-Stream Recurrent Neural Network for Human-Human Interaction Recognition
Abstract Slides Poster Similar
Efficient Grouping for Keypoint Detection
Alexey Sidnev, Ekaterina Krasikova, Maxim Kazakov
Auto-TLDR; Automatic Keypoint Grouping for DeepFashion2 Dataset
Abstract Slides Poster Similar
Space-Time Domain Tensor Neural Networks: An Application on Human Pose Classification
Konstantinos Makantasis, Athanasios Voulodimos, Anastasios Doulamis, Nikolaos Doulamis, Nikolaos Bakalos
Auto-TLDR; Tensor-Based Neural Network for Spatiotemporal Pose Classifiaction using Three-Dimensional Skeleton Data
Abstract Slides Poster Similar
Vertex Feature Encoding and Hierarchical Temporal Modeling in a Spatio-Temporal Graph Convolutional Network for Action Recognition
Konstantinos Papadopoulos, Enjie Ghorbel, Djamila Aouada, Bjorn Ottersten
Auto-TLDR; Spatio-Temporal Graph Convolutional Network for Skeleton-Based Action Recognition
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
GarmentGAN: Photo-Realistic Adversarial Fashion Transfer
Amir Hossein Raffiee, Michael Sollami

Auto-TLDR; GarmentGAN: A Generative Adversarial Network for Image-Based Garment Transfer
Abstract Slides Poster Similar
Motion-Supervised Co-Part Segmentation
Aliaksandr Siarohin, Subhankar Roy, Stéphane Lathuiliere, Sergey Tulyakov, Elisa Ricci, Nicu Sebe
Auto-TLDR; Self-supervised Co-Part Segmentation Using Motion Information from Videos
Self-Supervised Joint Encoding of Motion and Appearance for First Person Action Recognition
Mirco Planamente, Andrea Bottino, Barbara Caputo

Auto-TLDR; A Single Stream Architecture for Egocentric Action Recognition from the First-Person Point of View
Abstract Slides Poster Similar