Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli,
Marina Paolanti,
Nicola Conci,
Filippo Tessaro,
Emanuele Frontoni,
Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Similar papers
RefiNet: 3D Human Pose Refinement with Depth Maps
Andrea D'Eusanio, Stefano Pini, Guido Borghi, Roberto Vezzani, Rita Cucchiara

Auto-TLDR; RefiNet: A Multi-stage Framework for 3D Human Pose Estimation
Surface Material Dataset for Robotics Applications (SMDRA): A Dataset with Friction Coefficient and RGB-D for Surface Segmentation
Donghun Noh, Hyunwoo Nam, Min Sung Ahn, Hosik Chae, Sangjoon Lee, Kyle Gillespie, Dennis Hong
Auto-TLDR; A Surface Material Dataset for Robotics Applications
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
A Systematic Investigation on Deep Architectures for Automatic Skin Lesions Classification
Pierluigi Carcagni, Marco Leo, Andrea Cuna, Giuseppe Celeste, Cosimo Distante
Auto-TLDR; RegNet: Deep Investigation of Convolutional Neural Networks for Automatic Classification of Skin Lesions
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
Anomaly Detection, Localization and Classification for Railway Inspection
Riccardo Gasparini, Andrea D'Eusanio, Guido Borghi, Stefano Pini, Giuseppe Scaglione, Simone Calderara, Eugenio Fedeli, Rita Cucchiara

Auto-TLDR; Anomaly Detection and Localization using thermal images in the lowlight environment
Video Analytics Gait Trend Measurement for Fall Prevention and Health Monitoring
Lawrence O'Gorman, Xinyi Liu, Md Imran Sarker, Mariofanna Milanova
Auto-TLDR; Towards Health Monitoring of Gait with Deep Learning
Abstract Slides Poster Similar
Vision-Based Multi-Modal Framework for Action Recognition
Djamila Romaissa Beddiar, Mourad Oussalah, Brahim Nini
Auto-TLDR; Multi-modal Framework for Human Activity Recognition Using RGB, Depth and Skeleton Data
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Two-Level Attention-Based Fusion Learning for RGB-D Face Recognition
Hardik Uppal, Alireza Sepas-Moghaddam, Michael Greenspan, Ali Etemad
Auto-TLDR; Fused RGB-D Facial Recognition using Attention-Aware Feature Fusion
Abstract Slides Poster Similar
A Systematic Investigation on End-To-End Deep Recognition of Grocery Products in the Wild
Marco Leo, Pierluigi Carcagni, Cosimo Distante
Auto-TLDR; Automatic Recognition of Products on grocery shelf images using Convolutional Neural Networks
Abstract Slides Poster Similar
Rotational Adjoint Methods for Learning-Free 3D Human Pose Estimation from IMU Data
Caterina Emilia Agelide Buizza, Yiannis Demiris

Auto-TLDR; Learning-free 3D Human Pose Estimation from Inertial Measurement Unit Data
Automatic Semantic Segmentation of Structural Elements related to the Spinal Cord in the Lumbar Region by Using Convolutional Neural Networks
Jhon Jairo Sáenz Gamboa, Maria De La Iglesia-Vaya, Jon Ander Gómez
Auto-TLDR; Semantic Segmentation of Lumbar Spine Using Convolutional Neural Networks
Abstract Slides Poster Similar
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
Motion U-Net: Multi-Cue Encoder-Decoder Network for Motion Segmentation
Gani Rahmon, Filiz Bunyak, Kannappan Palaniappan

Auto-TLDR; Motion U-Net: A Deep Learning Framework for Robust Moving Object Detection under Challenging Conditions
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Fine-Tuning Convolutional Neural Networks: A Comprehensive Guide and Benchmark Analysis for Glaucoma Screening
Amed Mvoulana, Rostom Kachouri, Mohamed Akil
Auto-TLDR; Fine-tuning Convolutional Neural Networks for Glaucoma Screening
Abstract Slides Poster Similar
Inner Eye Canthus Localization for Human Body Temperature Screening
Claudio Ferrari, Lorenzo Berlincioni, Marco Bertini, Alberto Del Bimbo
Auto-TLDR; Automatic Localization of the Inner Eye Canthus in Thermal Face Images using 3D Morphable Face Model
Abstract Slides Poster Similar
Depth Videos for the Classification of Micro-Expressions
Ankith Jain Rakesh Kumar, Bir Bhanu, Christopher Casey, Sierra Cheung, Aaron Seitz
Auto-TLDR; RGB-D Dataset for the Classification of Facial Micro-expressions
Abstract Slides Poster Similar
Attribute-Based Quality Assessment for Demographic Estimation in Face Videos
Fabiola Becerra-Riera, Annette Morales-González, Heydi Mendez-Vazquez, Jean-Luc Dugelay
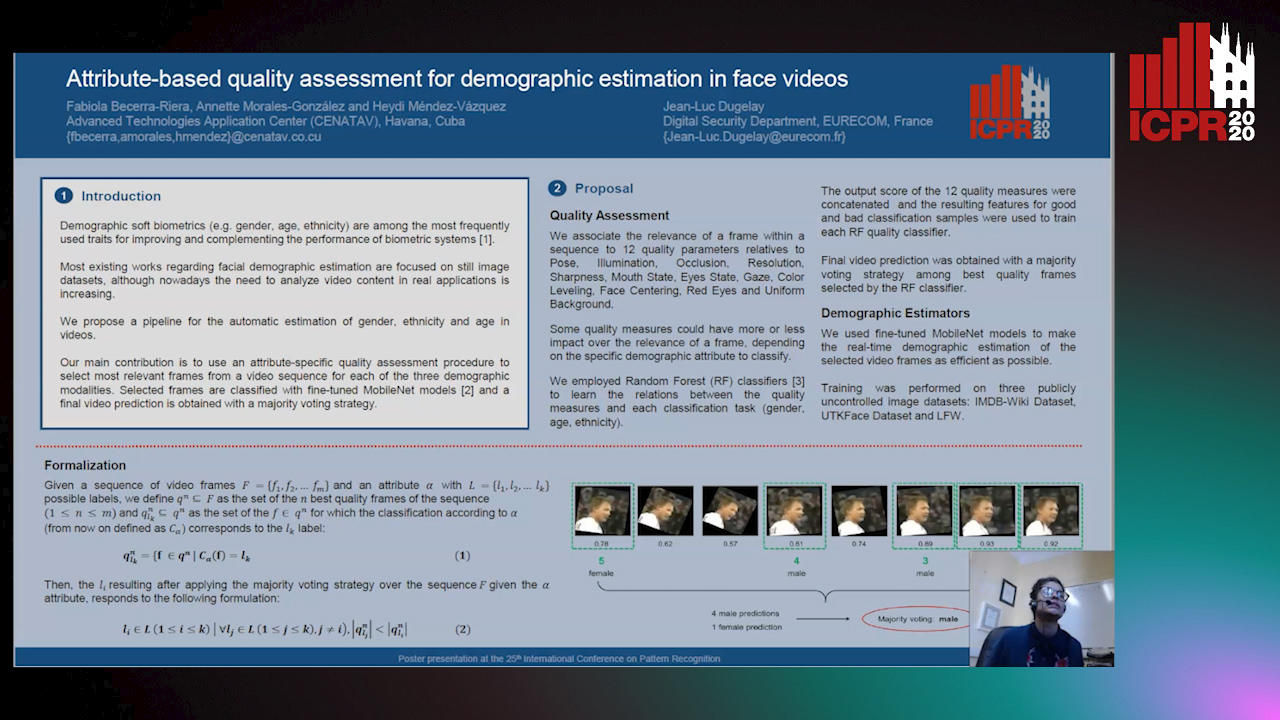
Auto-TLDR; Facial Demographic Estimation in Video Scenarios Using Quality Assessment
Gender Classification Using Video Sequences of Body Sway Recorded by Overhead Camera
Takuya Kamitani, Yuta Yamaguchi, Shintaro Nakatani, Masashi Nishiyama, Yoshio Iwai
Auto-TLDR; Spatio-Temporal Feature for Gender Classification of a Standing Person Using Body Stance Using Time-Series Signals
Abstract Slides Poster Similar
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
A Quantitative Evaluation Framework of Video De-Identification Methods
Sathya Bursic, Alessandro D'Amelio, Marco Granato, Giuliano Grossi, Raffaella Lanzarotti
Auto-TLDR; Face de-identification using photo-reality and facial expressions
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Encoder-Decoder Based Convolutional Neural Networks with Multi-Scale-Aware Modules for Crowd Counting
Pongpisit Thanasutives, Ken-Ichi Fukui, Masayuki Numao, Boonserm Kijsirikul
Auto-TLDR; M-SFANet and M-SegNet for Crowd Counting Using Multi-Scale Fusion Networks
Abstract Slides Poster Similar
PHNet: Parasite-Host Network for Video Crowd Counting
Shiqiao Meng, Jiajie Li, Weiwei Guo, Jinfeng Jiang, Lai Ye
Auto-TLDR; PHNet: A Parasite-Host Network for Video Crowd Counting
Abstract Slides Poster Similar
Exploring Severe Occlusion: Multi-Person 3D Pose Estimation with Gated Convolution
Renshu Gu, Gaoang Wang, Jenq-Neng Hwang

Auto-TLDR; 3D Human Pose Estimation for Multi-Human Videos with Occlusion
Location Prediction in Real Homes of Older Adults based on K-Means in Low-Resolution Depth Videos
Simon Simonsson, Flávia Dias Casagrande, Evi Zouganeli
Auto-TLDR; Semi-supervised Learning for Location Recognition and Prediction in Smart Homes using Depth Video Cameras
Abstract Slides Poster Similar
Silhouette Body Measurement Benchmarks
Song Yan, Johan Wirta, Joni-Kristian Kamarainen
Auto-TLDR; BODY-fit: A Realistic 3D Body Measurement Dataset for Anthropometric Measurement
Abstract Slides Poster Similar
From Early Biological Models to CNNs: Do They Look Where Humans Look?
Marinella Iole Cadoni, Andrea Lagorio, Enrico Grosso, Jia Huei Tan, Chee Seng Chan
Auto-TLDR; Comparing Neural Networks to Human Fixations for Semantic Learning
Abstract Slides Poster Similar
A Cross Domain Multi-Modal Dataset for Robust Face Anti-Spoofing
Qiaobin Ji, Shugong Xu, Xudong Chen, Shan Cao, Shunqing Zhang
Auto-TLDR; Cross domain multi-modal FAS dataset GREAT-FASD and several evaluation protocols for academic community
Abstract Slides Poster Similar
A Comparison of Neural Network Approaches for Melanoma Classification
Maria Frasca, Michele Nappi, Michele Risi, Genoveffa Tortora, Alessia Auriemma Citarella
Auto-TLDR; Classification of Melanoma Using Deep Neural Network Methodologies
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Wireless Localisation in WiFi Using Novel Deep Architectures
Peizheng Li, Han Cui, Aftab Khan, Usman Raza, Robert Piechocki, Angela Doufexi, Tim Farnham
Auto-TLDR; Deep Neural Network for Indoor Localisation of WiFi Devices in Indoor Environments
Abstract Slides Poster Similar
Anticipating Activity from Multimodal Signals
Tiziana Rotondo, Giovanni Maria Farinella, Davide Giacalone, Sebastiano Mauro Strano, Valeria Tomaselli, Sebastiano Battiato
Auto-TLDR; Exploiting Multimodal Signal Embedding Space for Multi-Action Prediction
Abstract Slides Poster Similar
Which are the factors affecting the performance of audio surveillance systems?
Antonio Greco, Antonio Roberto, Alessia Saggese, Mario Vento
Auto-TLDR; Sound Event Recognition Using Convolutional Neural Networks and Visual Representations on MIVIA Audio Events
Activity Recognition Using First-Person-View Cameras Based on Sparse Optical Flows
Peng-Yuan Kao, Yan-Jing Lei, Chia-Hao Chang, Chu-Song Chen, Ming-Sui Lee, Yi-Ping Hung
Auto-TLDR; 3D Convolutional Neural Network for Activity Recognition with FPV Videos
Abstract Slides Poster Similar
EdgeNet: Semantic Scene Completion from a Single RGB-D Image
Aloisio Dourado, Teofilo De Campos, Adrian Hilton, Hansung Kim

Auto-TLDR; Semantic Scene Completion using 3D Depth and RGB Information
Abstract Slides Poster Similar
Deep Gait Relative Attribute Using a Signed Quadratic Contrastive Loss
Yuta Hayashi, Shehata Allam, Yasushi Makihara, Daigo Muramatsu, Yasushi Yagi

Auto-TLDR; Signal-Contrastive Loss for Gait Attributes Estimation
Deep Convolutional Embedding for Digitized Painting Clustering
Giovanna Castellano, Gennaro Vessio
Auto-TLDR; A Deep Convolutional Embedding Model for Clustering Artworks
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
Confidence Calibration for Deep Renal Biopsy Immunofluorescence Image Classification
Federico Pollastri, Juan Maroñas, Federico Bolelli, Giulia Ligabue, Roberto Paredes, Riccardo Magistroni, Costantino Grana
Auto-TLDR; A Probabilistic Convolutional Neural Network for Immunofluorescence Classification in Renal Biopsy
Abstract Slides Poster Similar
LFIR2Pose: Pose Estimation from an Extremely Low-Resolution FIR Image Sequence
Saki Iwata, Yasutomo Kawanishi, Daisuke Deguchi, Ichiro Ide, Hiroshi Murase, Tomoyoshi Aizawa
Auto-TLDR; LFIR2Pose: Human Pose Estimation from a Low-Resolution Far-InfraRed Image Sequence
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Self-Supervised Joint Encoding of Motion and Appearance for First Person Action Recognition
Mirco Planamente, Andrea Bottino, Barbara Caputo

Auto-TLDR; A Single Stream Architecture for Egocentric Action Recognition from the First-Person Point of View
Abstract Slides Poster Similar
Real Time Fencing Move Classification and Detection at Touch Time During a Fencing Match
Cem Ekin Sunal, Chris G. Willcocks, Boguslaw Obara

Auto-TLDR; Fencing Body Move Classification and Detection Using Deep Learning