Motion U-Net: Multi-Cue Encoder-Decoder Network for Motion Segmentation
Gani Rahmon,
Filiz Bunyak,
Kannappan Palaniappan

Auto-TLDR; Motion U-Net: A Deep Learning Framework for Robust Moving Object Detection under Challenging Conditions
Similar papers
GraphBGS: Background Subtraction Via Recovery of Graph Signals
Jhony Heriberto Giraldo Zuluaga, Thierry Bouwmans
Auto-TLDR; Graph BackGround Subtraction using Graph Signals
Abstract Slides Poster Similar
Coarse-To-Fine Foreground Segmentation Based on Co-Occurrence Pixel-Block and Spatio-Temporal Attention Model
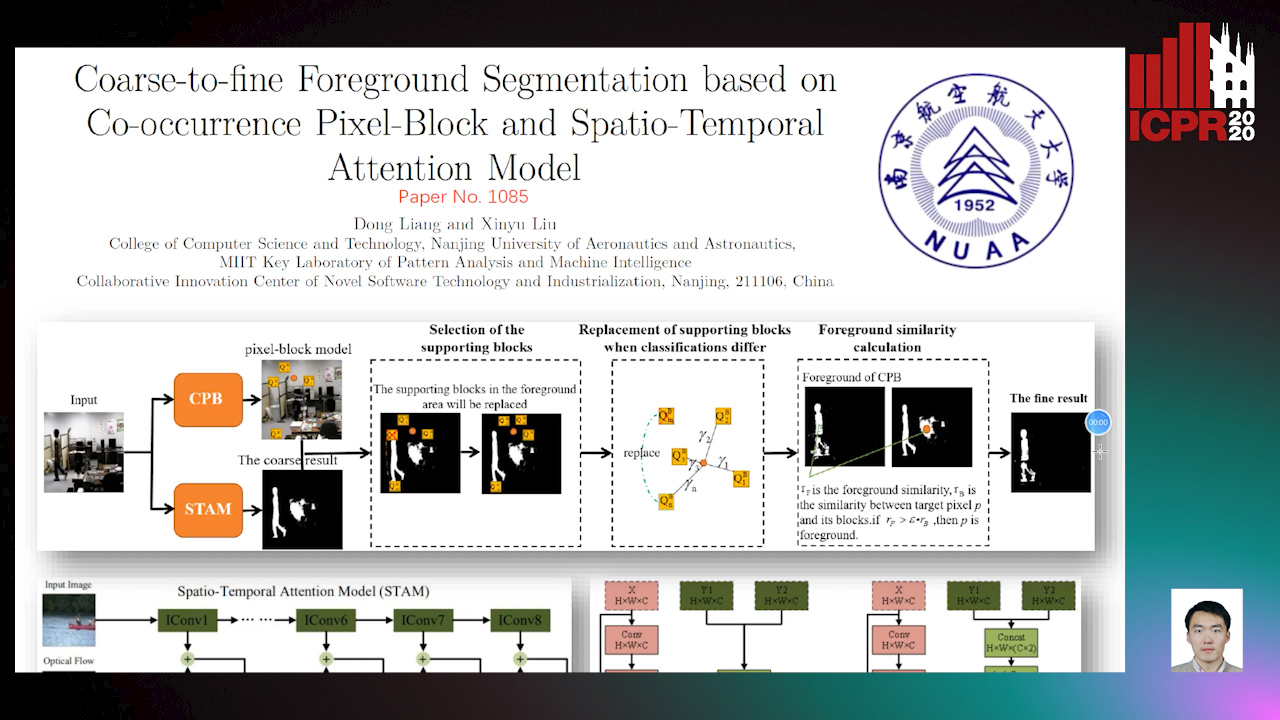
Auto-TLDR; Foreground Segmentation from coarse to Fine Using Co-occurrence Pixel-Block Model for Dynamic Scene
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
Video Semantic Segmentation Using Deep Multi-View Representation Learning
Akrem Sellami, Salvatore Tabbone

Auto-TLDR; Deep Multi-view Representation Learning for Video Object Segmentation
Abstract Slides Poster Similar
Gabriella: An Online System for Real-Time Activity Detection in Untrimmed Security Videos
Mamshad Nayeem Rizve, Ugur Demir, Praveen Praveen Tirupattur, Aayush Jung Rana, Kevin Duarte, Ishan Rajendrakumar Dave, Yogesh Rawat, Mubarak Shah
Auto-TLDR; Gabriella: A Real-Time Online System for Activity Detection in Surveillance Videos
Unsupervised Moving Object Detection through Background Models for PTZ Camera
Kimin Yun, Hyung-Il Kim, Kangmin Bae, Jongyoul Park
Auto-TLDR; Unsupervised Moving Object Detection in a PTZ Camera through Two Background Models
Abstract Slides Poster Similar
Learning Object Deformation and Motion Adaption for Semi-Supervised Video Object Segmentation
Xiaoyang Zheng, Xin Tan, Jianming Guo, Lizhuang Ma
Auto-TLDR; Semi-supervised Video Object Segmentation with Mask-propagation-based Model
Abstract Slides Poster Similar
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
Revisiting Sequence-To-Sequence Video Object Segmentation with Multi-Task Loss and Skip-Memory
Fatemeh Azimi, Benjamin Bischke, Sebastian Palacio, Federico Raue, Jörn Hees, Andreas Dengel

Auto-TLDR; Sequence-to-Sequence Learning for Video Object Segmentation
Abstract Slides Poster Similar
Human Segmentation with Dynamic LiDAR Data
Tao Zhong, Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi

Auto-TLDR; Spatiotemporal Neural Network for Human Segmentation with Dynamic Point Clouds
Accurate Background Subtraction Using Dynamic Object Presence Probability in Sports Scenes
Ryosuke Watanabe, Jun Chen, Tomoaki Konno, Sei Naito
Auto-TLDR; DOPP: Dynamic Object Presence Probabilistic Background Subtraction for Foreground Segmentation
Abstract Slides Poster Similar
Siamese Dynamic Mask Estimation Network for Fast Video Object Segmentation
Dexiang Hong, Guorong Li, Kai Xu, Li Su, Qingming Huang

Auto-TLDR; Siamese Dynamic Mask Estimation for Video Object Segmentation
Abstract Slides Poster Similar
Semantic Segmentation for Pedestrian Detection from Motion in Temporal Domain

Auto-TLDR; Motion Profile: Recognizing Pedestrians along with their Motion Directions in a Temporal Way
Abstract Slides Poster Similar
Object Segmentation Tracking from Generic Video Cues
Amirhossein Kardoost, Sabine Müller, Joachim Weickert, Margret Keuper

Auto-TLDR; A Light-Weight Variational Framework for Video Object Segmentation in Videos
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
SiamMT: Real-Time Arbitrary Multi-Object Tracking
Lorenzo Vaquero, Manuel Mucientes, Victor Brea

Auto-TLDR; SiamMT: A Deep-Learning-based Arbitrary Multi-Object Tracking System for Video
Abstract Slides Poster Similar
Human Embryo Cell Centroid Localization and Counting in Time-Lapse Sequences
Lisette Lockhart, Parvaneh Saeedi, Jason Au, Jon Havelock
Auto-TLDR; Automated Time-Lapse Estimation of Embryo Cell Stage in Time-lapse Sequences
Abstract Slides Poster Similar
ACCLVOS: Atrous Convolution with Spatial-Temporal ConvLSTM for Video Object Segmentation
Muzhou Xu, Shan Zong, Chunping Liu, Shengrong Gong, Zhaohui Wang, Yu Xia
Auto-TLDR; Semi-supervised Video Object Segmentation using U-shape Convolution and ConvLSTM
Abstract Slides Poster Similar
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
Video Reconstruction by Spatio-Temporal Fusion of Blurred-Coded Image Pair
Anupama S, Prasan Shedligeri, Abhishek Pal, Kaushik Mitr
Auto-TLDR; Recovering Video from Motion-Blurred and Coded Exposure Images Using Deep Learning
Abstract Slides Poster Similar
3D Attention Mechanism for Fine-Grained Classification of Table Tennis Strokes Using a Twin Spatio-Temporal Convolutional Neural Networks
Pierre-Etienne Martin, Jenny Benois-Pineau, Renaud Péteri, Julien Morlier
Auto-TLDR; Attentional Blocks for Action Recognition in Table Tennis Strokes
Abstract Slides Poster Similar
A GAN-Based Blind Inpainting Method for Masonry Wall Images
Yahya Ibrahim, Balázs Nagy, Csaba Benedek
Auto-TLDR; An End-to-End Blind Inpainting Algorithm for Masonry Wall Images
Abstract Slides Poster Similar
RescueNet: Joint Building Segmentation and Damage Assessment from Satellite Imagery
Auto-TLDR; RescueNet: End-to-End Building Segmentation and Damage Classification for Humanitarian Aid and Disaster Response
Abstract Slides Poster Similar
Real-time Pedestrian Lane Detection for Assistive Navigation using Neural Architecture Search
Sui Paul Ang, Son Lam Phung, Thi Nhat Anh Nguyen, Soan T. M. Duong, Abdesselam Bouzerdoum, Mark M. Schira
Auto-TLDR; Real-Time Pedestrian Lane Detection Using Deep Neural Networks
Abstract Slides Poster Similar
CT-UNet: An Improved Neural Network Based on U-Net for Building Segmentation in Remote Sensing Images
Huanran Ye, Sheng Liu, Kun Jin, Haohao Cheng
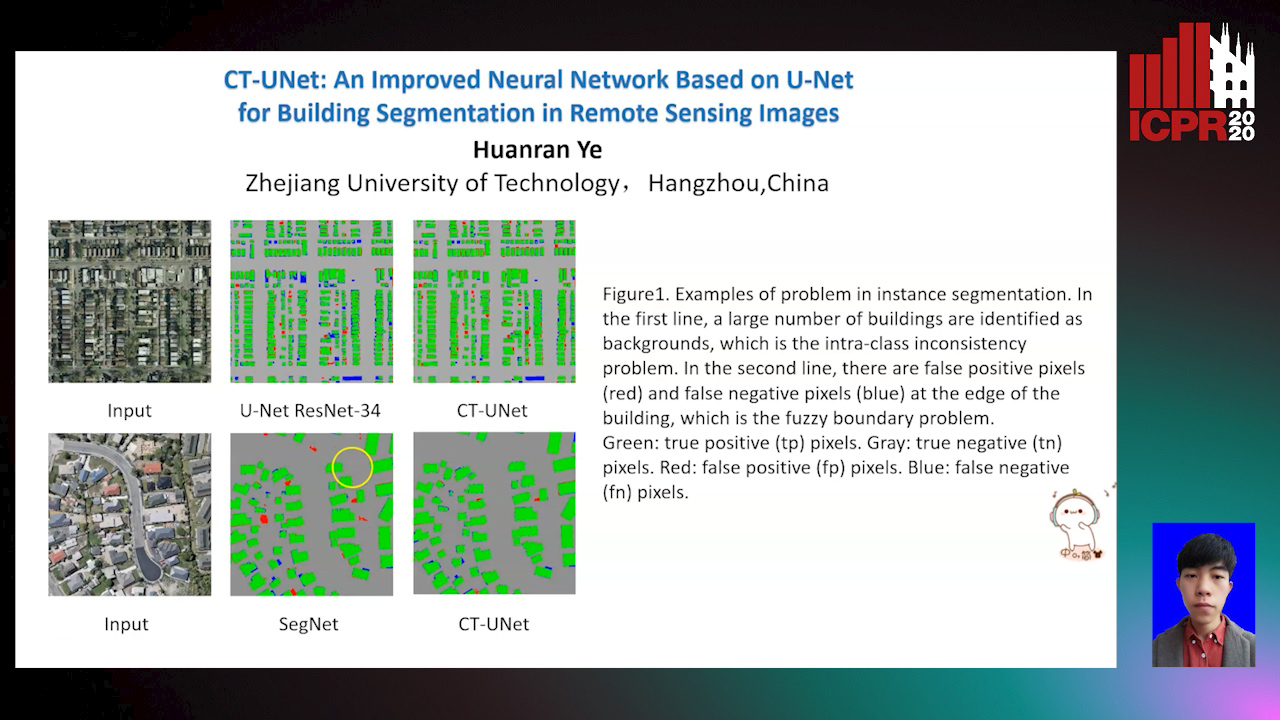
Auto-TLDR; Context-Transfer-UNet: A UNet-based Network for Building Segmentation in Remote Sensing Images
Abstract Slides Poster Similar
Triplet-Path Dilated Network for Detection and Segmentation of General Pathological Images
Jiaqi Luo, Zhicheng Zhao, Fei Su, Limei Guo
Auto-TLDR; Triplet-path Network for One-Stage Object Detection and Segmentation in Pathological Images
Motion and Region Aware Adversarial Learning for Fall Detection with Thermal Imaging
Vineet Mehta, Abhinav Dhall, Sujata Pal, Shehroz Khan
Auto-TLDR; Automatic Fall Detection with Adversarial Network using Thermal Imaging Camera
Abstract Slides Poster Similar
Robust Visual Object Tracking with Two-Stream Residual Convolutional Networks
Ning Zhang, Jingen Liu, Ke Wang, Dan Zeng, Tao Mei

Auto-TLDR; Two-Stream Residual Convolutional Network for Visual Tracking
Abstract Slides Poster Similar
Temporal Feature Enhancement Network with External Memory for Object Detection in Surveillance Video
Masato Fujitake, Akihiro Sugimoto

Auto-TLDR; Temporal Attention Based External Memory Network for Surveillance Object Detection
TinyVIRAT: Low-Resolution Video Action Recognition
Ugur Demir, Yogesh Rawat, Mubarak Shah
Auto-TLDR; TinyVIRAT: A Progressive Generative Approach for Action Recognition in Videos
Abstract Slides Poster Similar
NephCNN: A Deep-Learning Framework for Vessel Segmentation in Nephrectomy Laparoscopic Videos
Alessandro Casella, Sara Moccia, Chiara Carlini, Emanuele Frontoni, Elena De Momi, Leonardo Mattos

Auto-TLDR; Adversarial Fully Convolutional Neural Networks for kidney vessel segmentation from nephrectomy laparoscopic videos
Abstract Slides Poster Similar
A Grid-Based Representation for Human Action Recognition
Soufiane Lamghari, Guillaume-Alexandre Bilodeau, Nicolas Saunier

Auto-TLDR; GRAR: Grid-based Representation for Action Recognition in Videos
Abstract Slides Poster Similar
Self-Supervised Joint Encoding of Motion and Appearance for First Person Action Recognition
Mirco Planamente, Andrea Bottino, Barbara Caputo

Auto-TLDR; A Single Stream Architecture for Egocentric Action Recognition from the First-Person Point of View
Abstract Slides Poster Similar
Robust Pedestrian Detection in Thermal Imagery Using Synthesized Images
My Kieu, Lorenzo Berlincioni, Leonardo Galteri, Marco Bertini, Andrew Bagdanov, Alberto Del Bimbo

Auto-TLDR; Improving Pedestrian Detection in the thermal domain using Generative Adversarial Network
Abstract Slides Poster Similar
A Lumen Segmentation Method in Ureteroscopy Images Based on a Deep Residual U-Net Architecture
Jorge Lazo, Marzullo Aldo, Sara Moccia, Michele Catellani, Benoit Rosa, Elena De Momi, Michel De Mathelin, Francesco Calimeri
Auto-TLDR; A Deep Neural Network for Ureteroscopy with Residual Units
Abstract Slides Poster Similar
Estimation of Abundance and Distribution of SaltMarsh Plants from Images Using Deep Learning
Jayant Parashar, Suchendra Bhandarkar, Jacob Simon, Brian Hopkinson, Steven Pennings
Auto-TLDR; CNN-based approaches to automated plant identification and localization in salt marsh images
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
DE-Net: Dilated Encoder Network for Automated Tongue Segmentation
Hui Tang, Bin Wang, Jun Zhou, Yongsheng Gao

Auto-TLDR; Automated Tongue Image Segmentation using De-Net
Abstract Slides Poster Similar
A Benchmark Dataset for Segmenting Liver, Vasculature and Lesions from Large-Scale Computed Tomography Data
Bo Wang, Zhengqing Xu, Wei Xu, Qingsen Yan, Liang Zhang, Zheng You

Auto-TLDR; The Biggest Treatment-Oriented Liver Cancer Dataset for Segmentation
Abstract Slides Poster Similar
Relevance Detection in Cataract Surgery Videos by Spatio-Temporal Action Localization
Negin Ghamsarian, Mario Taschwer, Doris Putzgruber, Stephanie. Sarny, Klaus Schoeffmann
Auto-TLDR; relevance-based retrieval in cataract surgery videos
Video Lightening with Dedicated CNN Architecture
Li-Wen Wang, Wan-Chi Siu, Zhi-Song Liu, Chu-Tak Li, P. K. Daniel Lun
Auto-TLDR; VLN: Video Lightening Network for Driving Assistant Systems in Dark Environment
Abstract Slides Poster Similar
Transfer Learning through Weighted Loss Function and Group Normalization for Vessel Segmentation from Retinal Images
Abdullah Sarhan, Jon Rokne, Reda Alhajj, Andrew Crichton
Auto-TLDR; Deep Learning for Segmentation of Blood Vessels in Retinal Images
Abstract Slides Poster Similar
Automatic Semantic Segmentation of Structural Elements related to the Spinal Cord in the Lumbar Region by Using Convolutional Neural Networks
Jhon Jairo Sáenz Gamboa, Maria De La Iglesia-Vaya, Jon Ander Gómez
Auto-TLDR; Semantic Segmentation of Lumbar Spine Using Convolutional Neural Networks
Abstract Slides Poster Similar
What and How? Jointly Forecasting Human Action and Pose
Yanjun Zhu, Yanxia Zhang, Qiong Liu, Andreas Girgensohn

Auto-TLDR; Forecasting Human Actions and Motion Trajectories with Joint Action Classification and Pose Regression
Abstract Slides Poster Similar
Residual Learning of Video Frame Interpolation Using Convolutional LSTM
Auto-TLDR; Video Frame Interpolation Using Residual Learning and Convolutional LSTMs
Abstract Slides Poster Similar
CAggNet: Crossing Aggregation Network for Medical Image Segmentation
Auto-TLDR; Crossing Aggregation Network for Medical Image Segmentation
Abstract Slides Poster Similar