Unsupervised Moving Object Detection through Background Models for PTZ Camera
Kimin Yun,
Hyung-Il Kim,
Kangmin Bae,
Jongyoul Park
Auto-TLDR; Unsupervised Moving Object Detection in a PTZ Camera through Two Background Models
Similar papers
Coarse-To-Fine Foreground Segmentation Based on Co-Occurrence Pixel-Block and Spatio-Temporal Attention Model
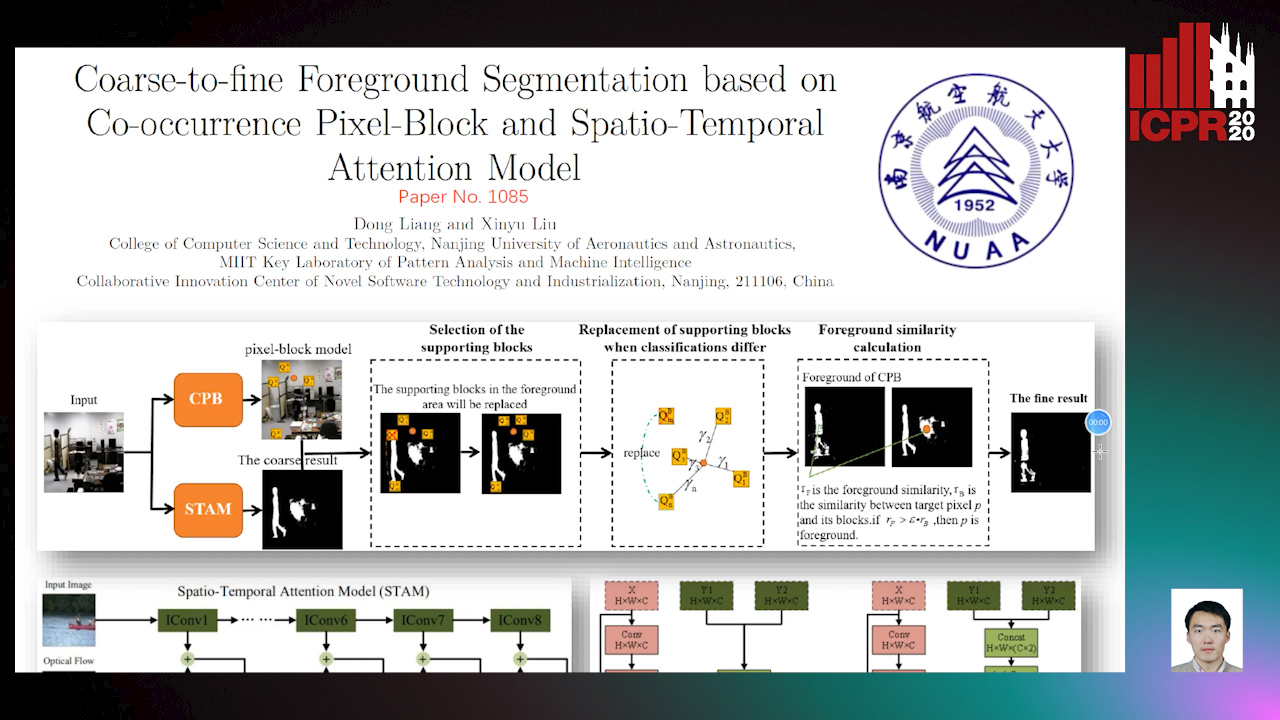
Auto-TLDR; Foreground Segmentation from coarse to Fine Using Co-occurrence Pixel-Block Model for Dynamic Scene
Abstract Slides Poster Similar
Motion U-Net: Multi-Cue Encoder-Decoder Network for Motion Segmentation
Gani Rahmon, Filiz Bunyak, Kannappan Palaniappan

Auto-TLDR; Motion U-Net: A Deep Learning Framework for Robust Moving Object Detection under Challenging Conditions
Abstract Slides Poster Similar
Accurate Background Subtraction Using Dynamic Object Presence Probability in Sports Scenes
Ryosuke Watanabe, Jun Chen, Tomoaki Konno, Sei Naito
Auto-TLDR; DOPP: Dynamic Object Presence Probabilistic Background Subtraction for Foreground Segmentation
Abstract Slides Poster Similar
GraphBGS: Background Subtraction Via Recovery of Graph Signals
Jhony Heriberto Giraldo Zuluaga, Thierry Bouwmans
Auto-TLDR; Graph BackGround Subtraction using Graph Signals
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Learning Object Deformation and Motion Adaption for Semi-Supervised Video Object Segmentation
Xiaoyang Zheng, Xin Tan, Jianming Guo, Lizhuang Ma
Auto-TLDR; Semi-supervised Video Object Segmentation with Mask-propagation-based Model
Abstract Slides Poster Similar
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
Reducing False Positives in Object Tracking with Siamese Network
Takuya Ogawa, Takashi Shibata, Shoji Yachida, Toshinori Hosoi
Auto-TLDR; Robust Long-Term Object Tracking with Adaptive Search based on Motion Models
Abstract Slides Poster Similar
Siamese Dynamic Mask Estimation Network for Fast Video Object Segmentation
Dexiang Hong, Guorong Li, Kai Xu, Li Su, Qingming Huang

Auto-TLDR; Siamese Dynamic Mask Estimation for Video Object Segmentation
Abstract Slides Poster Similar
Revisiting Sequence-To-Sequence Video Object Segmentation with Multi-Task Loss and Skip-Memory
Fatemeh Azimi, Benjamin Bischke, Sebastian Palacio, Federico Raue, Jörn Hees, Andreas Dengel

Auto-TLDR; Sequence-to-Sequence Learning for Video Object Segmentation
Abstract Slides Poster Similar
ACCLVOS: Atrous Convolution with Spatial-Temporal ConvLSTM for Video Object Segmentation
Muzhou Xu, Shan Zong, Chunping Liu, Shengrong Gong, Zhaohui Wang, Yu Xia
Auto-TLDR; Semi-supervised Video Object Segmentation using U-shape Convolution and ConvLSTM
Abstract Slides Poster Similar
Visual Saliency Oriented Vehicle Scale Estimation
Qixin Chen, Tie Liu, Jiali Ding, Zejian Yuan, Yuanyuan Shang

Auto-TLDR; Regularized Intensity Matching for Vehicle Scale Estimation with salient object detection
Abstract Slides Poster Similar
Learning Defects in Old Movies from Manually Assisted Restoration
Arthur Renaudeau, Travis Seng, Axel Carlier, Jean-Denis Durou, Fabien Pierre, Francois Lauze, Jean-François Aujol
Auto-TLDR; U-Net: Detecting Defects in Old Movies by Inpainting Techniques
Abstract Slides Poster Similar
Ground-truthing Large Human Behavior Monitoring Datasets
Tehreem Qasim, Robert Fisher, Naeem Bhatti
Auto-TLDR; Semi-automated Groundtruthing for Large Video Datasets
Abstract Slides Poster Similar
Human Segmentation with Dynamic LiDAR Data
Tao Zhong, Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi

Auto-TLDR; Spatiotemporal Neural Network for Human Segmentation with Dynamic Point Clouds
An Adaptive Fusion Model Based on Kalman Filtering and LSTM for Fast Tracking of Road Signs
Chengliang Wang, Xin Xie, Chao Liao

Auto-TLDR; Fusion of ThunderNet and Region Growing Detector for Road Sign Detection and Tracking
Abstract Slides Poster Similar
Object Segmentation Tracking from Generic Video Cues
Amirhossein Kardoost, Sabine Müller, Joachim Weickert, Margret Keuper

Auto-TLDR; A Light-Weight Variational Framework for Video Object Segmentation in Videos
Abstract Slides Poster Similar
Video Semantic Segmentation Using Deep Multi-View Representation Learning
Akrem Sellami, Salvatore Tabbone

Auto-TLDR; Deep Multi-view Representation Learning for Video Object Segmentation
Abstract Slides Poster Similar
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
Dynamic Resource-Aware Corner Detection for Bio-Inspired Vision Sensors
Sherif Abdelmonem Sayed Mohamed, Jawad Yasin, Mohammad-Hashem Haghbayan, Antonio Miele, Jukka Veikko Heikkonen, Hannu Tenhunen, Juha Plosila
Auto-TLDR; Three Layer Filtering-Harris Algorithm for Event-based Cameras in Real-Time
Online Object Recognition Using CNN-Based Algorithm on High-Speed Camera Imaging
Shigeaki Namiki, Keiko Yokoyama, Shoji Yachida, Takashi Shibata, Hiroyoshi Miyano, Masatoshi Ishikawa
Auto-TLDR; Real-Time Object Recognition with High-Speed Camera Imaging with Population Data Clearing and Data Ensemble
Abstract Slides Poster Similar
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
User-Independent Gaze Estimation by Extracting Pupil Parameter and Its Mapping to the Gaze Angle

Auto-TLDR; Gaze Point Estimation using Pupil Shape for Generalization
Abstract Slides Poster Similar
SiamMT: Real-Time Arbitrary Multi-Object Tracking
Lorenzo Vaquero, Manuel Mucientes, Victor Brea

Auto-TLDR; SiamMT: A Deep-Learning-based Arbitrary Multi-Object Tracking System for Video
Abstract Slides Poster Similar
Temporal Feature Enhancement Network with External Memory for Object Detection in Surveillance Video
Masato Fujitake, Akihiro Sugimoto

Auto-TLDR; Temporal Attention Based External Memory Network for Surveillance Object Detection
Mobile Augmented Reality: Fast, Precise, and Smooth Planar Object Tracking
Dmitrii Matveichev, Daw-Tung Lin

Auto-TLDR; Planar Object Tracking with Sparse Optical Flow Tracking and Descriptor Matching
Abstract Slides Poster Similar
Learning to Segment Clustered Amoeboid Cells from Brightfield Microscopy Via Multi-Task Learning with Adaptive Weight Selection
Rituparna Sarkar, Suvadip Mukherjee, Elisabeth Labruyere, Jean-Christophe Olivo-Marin
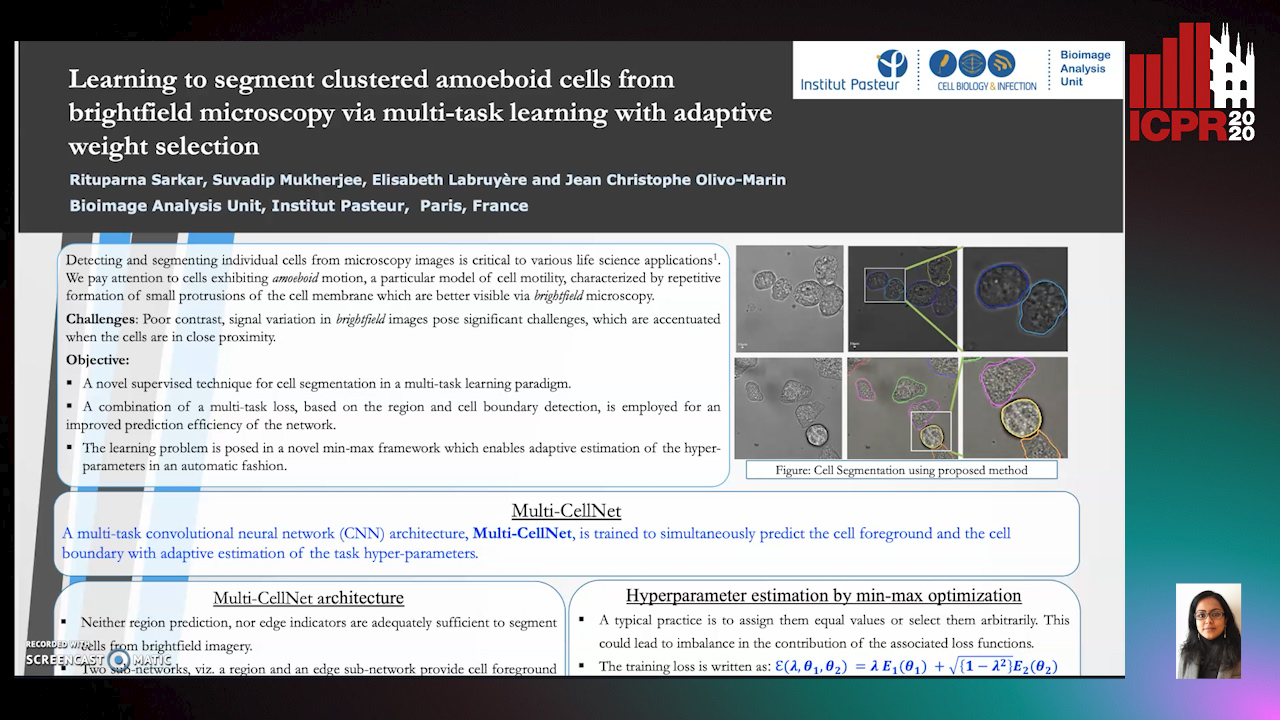
Auto-TLDR; Supervised Cell Segmentation from Microscopy Images using Multi-task Learning in a Multi-Task Learning Paradigm
RSINet: Rotation-Scale Invariant Network for Online Visual Tracking
Yang Fang, Geunsik Jo, Chang-Hee Lee

Auto-TLDR; RSINet: Rotation-Scale Invariant Network for Adaptive Tracking
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Learning to Segment Dynamic Objects Using SLAM Outliers
Dupont Romain, Mohamed Tamaazousti, Hervé Le Borgne

Auto-TLDR; Automatic Segmentation of Dynamic Objects Using SLAM Outliers Using Consensus Inversion
Abstract Slides Poster Similar
RONELD: Robust Neural Network Output Enhancement for Active Lane Detection
Zhe Ming Chng, Joseph Mun Hung Lew, Jimmy Addison Lee

Auto-TLDR; Real-Time Robust Neural Network Output Enhancement for Active Lane Detection
Abstract Slides Poster Similar
Approach for Document Detection by Contours and Contrasts
Daniil Tropin, Sergey Ilyuhin, Dmitry Nikolaev, Vladimir V. Arlazarov
Auto-TLDR; A countor-based method for arbitrary document detection on a mobile device
Abstract Slides Poster Similar
Motion-Supervised Co-Part Segmentation
Aliaksandr Siarohin, Subhankar Roy, Stéphane Lathuiliere, Sergey Tulyakov, Elisa Ricci, Nicu Sebe
Auto-TLDR; Self-supervised Co-Part Segmentation Using Motion Information from Videos
Unconstrained Vision Guided UAV Based Safe Helicopter Landing
Arindam Sikdar, Abhimanyu Sahu, Debajit Sen, Rohit Mahajan, Ananda Chowdhury

Auto-TLDR; Autonomous Helicopter Landing in Hazardous Environments from Unmanned Aerial Images Using Constrained Graph Clustering
Abstract Slides Poster Similar
Multi-Camera Sports Players 3D Localization with Identification Reasoning
Yukun Yang, Ruiheng Zhang, Wanneng Wu, Yu Peng, Xu Min

Auto-TLDR; Probabilistic and Identified Occupancy Map for Sports Players 3D Localization
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Semantic Segmentation for Pedestrian Detection from Motion in Temporal Domain

Auto-TLDR; Motion Profile: Recognizing Pedestrians along with their Motion Directions in a Temporal Way
Abstract Slides Poster Similar
Coarse to Fine: Progressive and Multi-Task Learning for Salient Object Detection
Dong-Goo Kang, Sangwoo Park, Joonki Paik
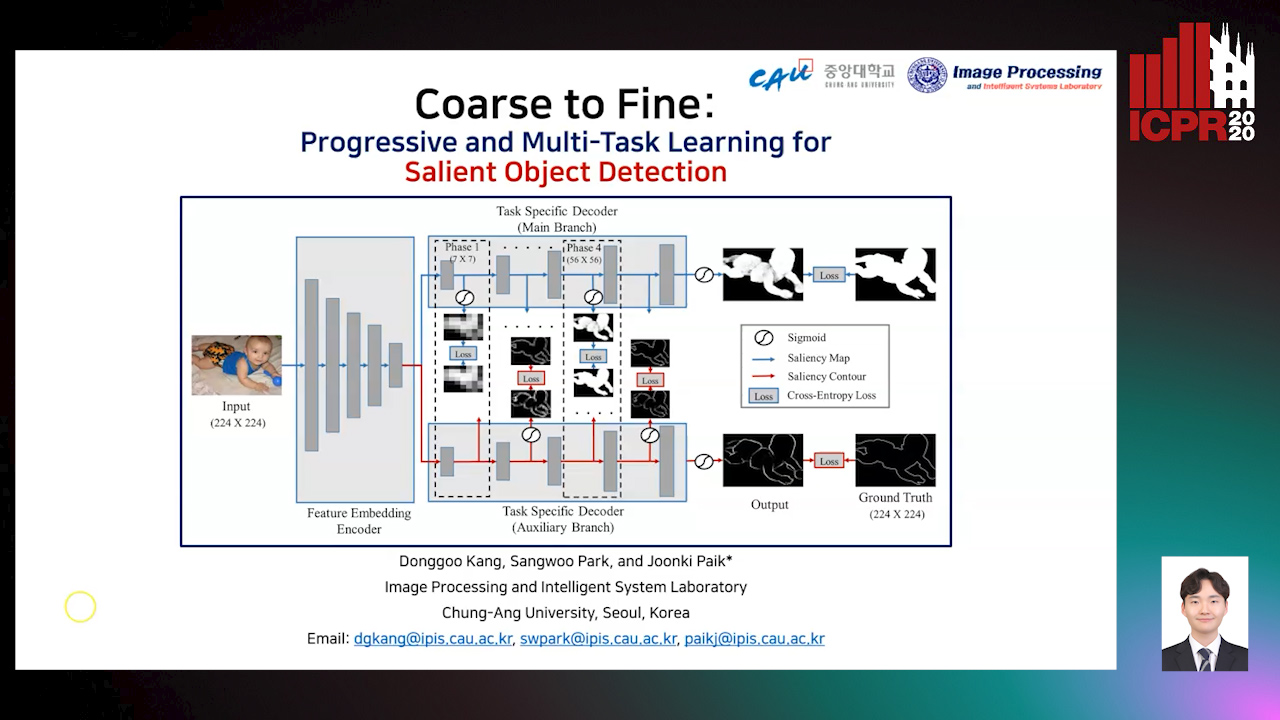
Auto-TLDR; Progressive and mutl-task learning scheme for salient object detection
Abstract Slides Poster Similar
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
Gabriella: An Online System for Real-Time Activity Detection in Untrimmed Security Videos
Mamshad Nayeem Rizve, Ugur Demir, Praveen Praveen Tirupattur, Aayush Jung Rana, Kevin Duarte, Ishan Rajendrakumar Dave, Yogesh Rawat, Mubarak Shah
Auto-TLDR; Gabriella: A Real-Time Online System for Activity Detection in Surveillance Videos
Adaptive Estimation of Optimal Color Transformations for Deep Convolutional Network Based Homography Estimation
Miguel A. Molina-Cabello, Jorge García-González, Rafael Marcos Luque-Baena, Karl Thurnhofer-Hemsi, Ezequiel López-Rubio
Auto-TLDR; Improving Homography Estimation from a Pair of Natural Images Using Deep Convolutional Neural Networks
Abstract Slides Poster Similar
Utilising Visual Attention Cues for Vehicle Detection and Tracking
Feiyan Hu, Venkatesh Gurram Munirathnam, Noel E O'Connor, Alan Smeaton, Suzanne Little

Auto-TLDR; Visual Attention for Object Detection and Tracking in Driver-Assistance Systems
Abstract Slides Poster Similar
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
PA-FlowNet: Pose-Auxiliary Optical Flow Network for Spacecraft Relative Pose Estimation
Zhi Yu Chen, Po-Heng Chen, Kuan-Wen Chen, Chen-Yu Chan
Auto-TLDR; PA-FlowNet: An End-to-End Pose-auxiliary Optical Flow Network for Space Travel and Landing
Abstract Slides Poster Similar
Visual Object Tracking in Drone Images with Deep Reinforcement Learning

Auto-TLDR; A Deep Reinforcement Learning based Single Object Tracker for Drone Applications
Abstract Slides Poster Similar
Real Time Fencing Move Classification and Detection at Touch Time During a Fencing Match
Cem Ekin Sunal, Chris G. Willcocks, Boguslaw Obara

Auto-TLDR; Fencing Body Move Classification and Detection Using Deep Learning
Object-Oriented Map Exploration and Construction Based on Auxiliary Task Aided DRL
Junzhe Xu, Jianhua Zhang, Shengyong Chen, Honghai Liu

Auto-TLDR; Auxiliary Task Aided Deep Reinforcement Learning for Environment Exploration by Autonomous Robots