User-Independent Gaze Estimation by Extracting Pupil Parameter and Its Mapping to the Gaze Angle

Auto-TLDR; Gaze Point Estimation using Pupil Shape for Generalization
Similar papers
Adaptive Feature Fusion Network for Gaze Tracking in Mobile Tablets
Yiwei Bao, Yihua Cheng, Yunfei Liu, Feng Lu
Auto-TLDR; Adaptive Feature Fusion Network for Multi-stream Gaze Estimation in Mobile Tablets
Abstract Slides Poster Similar
Detection and Correspondence Matching of Corneal Reflections for Eye Tracking Using Deep Learning
Soumil Chugh, Braiden Brousseau, Jonathan Rose, Moshe Eizenman
Auto-TLDR; A Fully Convolutional Neural Network for Corneal Reflection Detection and Matching in Extended Reality Eye Tracking Systems
Abstract Slides Poster Similar
Estimating Gaze Points from Facial Landmarks by a Remote Spherical Camera
Auto-TLDR; Gaze Point Estimation from a Spherical Image from Facial Landmarks
Abstract Slides Poster Similar
Classifying Eye-Tracking Data Using Saliency Maps
Shafin Rahman, Sejuti Rahman, Omar Shahid, Md. Tahmeed Abdullah, Jubair Ahmed Sourov
Auto-TLDR; Saliency-based Feature Extraction for Automatic Classification of Eye-tracking Data
Abstract Slides Poster Similar
Fully Convolutional Neural Networks for Raw Eye Tracking Data Segmentation, Generation, and Reconstruction
Wolfgang Fuhl, Yao Rong, Enkelejda Kasneci
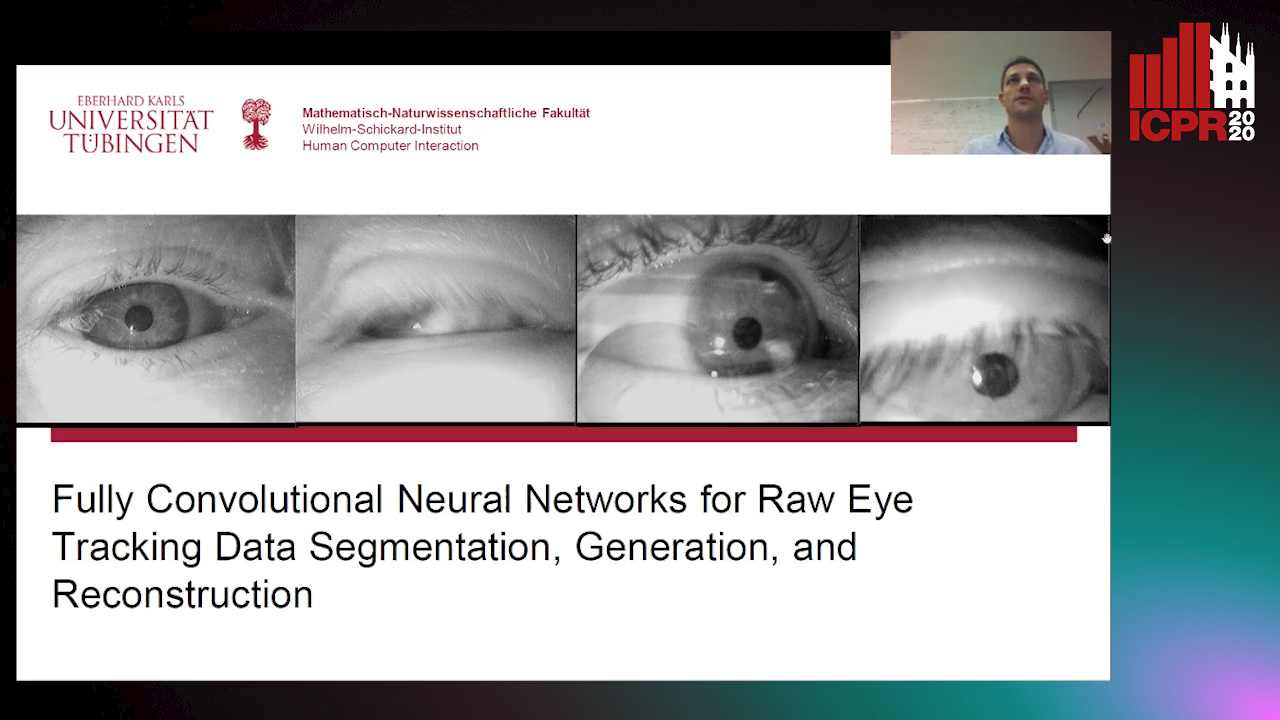
Auto-TLDR; Semantic Segmentation of Eye Tracking Data with Fully Convolutional Neural Networks
Abstract Slides Poster Similar
Exposing Deepfake Videos by Tracking Eye Movements
Meng Li, Beibei Liu, Yujiang Hu, Yufei Wang

Auto-TLDR; A Novel Approach to Detecting Deepfake Videos
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Explainable Online Validation of Machine Learning Models for Practical Applications
Wolfgang Fuhl, Yao Rong, Thomas Motz, Michael Scheidt, Andreas Markus Hartel, Andreas Koch, Enkelejda Kasneci
Auto-TLDR; A Reformulation of Regression and Classification for Machine Learning Algorithm Validation
Abstract Slides Poster Similar
Sequential Non-Rigid Factorisation for Head Pose Estimation
Stefania Cristina, Kenneth Patrick Camilleri
Auto-TLDR; Sequential Shape-and-Motion Factorisation for Head Pose Estimation in Eye-Gaze Tracking
Abstract Slides Poster Similar
A General End-To-End Method for Characterizing Neuropsychiatric Disorders Using Free-Viewing Visual Scanning Tasks
Hong Yue Sean Liu, Jonathan Chung, Moshe Eizenman
Auto-TLDR; A general, data-driven, end-to-end framework that extracts relevant features of attentional bias from visual scanning behaviour and uses these features
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
A Two-Step Approach to Lidar-Camera Calibration
Yingna Su, Yaqing Ding, Jian Yang, Hui Kong

Auto-TLDR; Closed-Form Calibration of Lidar-camera System for Ego-motion Estimation and Scene Understanding
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Inner Eye Canthus Localization for Human Body Temperature Screening
Claudio Ferrari, Lorenzo Berlincioni, Marco Bertini, Alberto Del Bimbo
Auto-TLDR; Automatic Localization of the Inner Eye Canthus in Thermal Face Images using 3D Morphable Face Model
Abstract Slides Poster Similar
Polarimetric Image Augmentation
Marc Blanchon, Fabrice Meriaudeau, Olivier Morel, Ralph Seulin, Desire Sidibe

Auto-TLDR; Polarimetric Augmentation for Deep Learning in Robotics Applications
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Exploring Severe Occlusion: Multi-Person 3D Pose Estimation with Gated Convolution
Renshu Gu, Gaoang Wang, Jenq-Neng Hwang

Auto-TLDR; 3D Human Pose Estimation for Multi-Human Videos with Occlusion
Camera Calibration Using Parallel Line Segments

Auto-TLDR; Closed-Form Calibration of Surveillance Cameras using Parallel 3D Line Segment Projections
Abstract Slides Poster Similar
Audio-Video Detection of the Active Speaker in Meetings
Francisco Madrigal, Frederic Lerasle, Lionel Pibre, Isabelle Ferrané

Auto-TLDR; Active Speaker Detection with Visual and Contextual Information from Meeting Context
Abstract Slides Poster Similar
Mobile Augmented Reality: Fast, Precise, and Smooth Planar Object Tracking
Dmitrii Matveichev, Daw-Tung Lin

Auto-TLDR; Planar Object Tracking with Sparse Optical Flow Tracking and Descriptor Matching
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
Wireless Localisation in WiFi Using Novel Deep Architectures
Peizheng Li, Han Cui, Aftab Khan, Usman Raza, Robert Piechocki, Angela Doufexi, Tim Farnham
Auto-TLDR; Deep Neural Network for Indoor Localisation of WiFi Devices in Indoor Environments
Abstract Slides Poster Similar
Approach for Document Detection by Contours and Contrasts
Daniil Tropin, Sergey Ilyuhin, Dmitry Nikolaev, Vladimir V. Arlazarov
Auto-TLDR; A countor-based method for arbitrary document detection on a mobile device
Abstract Slides Poster Similar
5D Light Field Synthesis from a Monocular Video
Kyuho Bae, Andre Ivan, Hajime Nagahara, In Kyu Park

Auto-TLDR; Synthesis of Light Field Video from Monocular Video using Deep Learning
RefiNet: 3D Human Pose Refinement with Depth Maps
Andrea D'Eusanio, Stefano Pini, Guido Borghi, Roberto Vezzani, Rita Cucchiara

Auto-TLDR; RefiNet: A Multi-stage Framework for 3D Human Pose Estimation
OmniFlowNet: A Perspective Neural Network Adaptation for Optical Flow Estimation in Omnidirectional Images
Charles-Olivier Artizzu, Haozhou Zhang, Guillaume Allibert, Cédric Demonceaux

Auto-TLDR; OmniFlowNet: A Convolutional Neural Network for Omnidirectional Optical Flow Estimation
Abstract Slides Poster Similar
Collaborative Human Machine Attention Module for Character Recognition
Chetan Ralekar, Tapan Gandhi, Santanu Chaudhury
Auto-TLDR; A Collaborative Human-Machine Attention Module for Deep Neural Networks
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
DE-Net: Dilated Encoder Network for Automated Tongue Segmentation
Hui Tang, Bin Wang, Jun Zhou, Yongsheng Gao

Auto-TLDR; Automated Tongue Image Segmentation using De-Net
Abstract Slides Poster Similar
Learning Knowledge-Rich Sequential Model for Planar Homography Estimation in Aerial Video

Auto-TLDR; Sequential Estimation of Planar Homographic Transformations over Aerial Videos
Abstract Slides Poster Similar
Electroencephalography Signal Processing Based on Textural Features for Monitoring the Driver’s State by a Brain-Computer Interface
Giulia Orrù, Marco Micheletto, Fabio Terranova, Gian Luca Marcialis

Auto-TLDR; One-dimensional Local Binary Pattern Algorithm for Estimating Driver Vigilance in a Brain-Computer Interface System
Abstract Slides Poster Similar
Detecting Manipulated Facial Videos: A Time Series Solution
Zhang Zhewei, Ma Can, Gao Meilin, Ding Bowen
Auto-TLDR; Face-Alignment Based Bi-LSTM for Fake Video Detection
Abstract Slides Poster Similar
GazeMAE: General Representations of Eye Movements Using a Micro-Macro Autoencoder
Louise Gillian C. Bautista, Prospero Naval
Auto-TLDR; Fast and Slow Eye Movement Representations for Sentiment-agnostic Eye Tracking
Abstract Slides Poster Similar
Rotational Adjoint Methods for Learning-Free 3D Human Pose Estimation from IMU Data
Caterina Emilia Agelide Buizza, Yiannis Demiris

Auto-TLDR; Learning-free 3D Human Pose Estimation from Inertial Measurement Unit Data
3D Semantic Labeling of Photogrammetry Meshes Based on Active Learning
Mengqi Rong, Shuhan Shen, Zhanyi Hu

Auto-TLDR; 3D Semantic Expression of Urban Scenes Based on Active Learning
Abstract Slides Poster Similar
PolyLaneNet: Lane Estimation Via Deep Polynomial Regression
Talles Torres, Rodrigo Berriel, Thiago Paixão, Claudine Badue, Alberto F. De Souza, Thiago Oliveira-Santos
Auto-TLDR; Real-Time Lane Detection with Deep Polynomial Regression
Abstract Slides Poster Similar
Edge-Aware Monocular Dense Depth Estimation with Morphology
Zhi Li, Xiaoyang Zhu, Haitao Yu, Qi Zhang, Yongshi Jiang

Auto-TLDR; Spatio-Temporally Smooth Dense Depth Maps Using Only a CPU
Abstract Slides Poster Similar
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
A Lumen Segmentation Method in Ureteroscopy Images Based on a Deep Residual U-Net Architecture
Jorge Lazo, Marzullo Aldo, Sara Moccia, Michele Catellani, Benoit Rosa, Elena De Momi, Michel De Mathelin, Francesco Calimeri
Auto-TLDR; A Deep Neural Network for Ureteroscopy with Residual Units
Abstract Slides Poster Similar
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Real-Time Driver Drowsiness Detection Using Facial Action Units
Malaika Vijay, Nandagopal Netrakanti Vinayak, Maanvi Nunna, Subramanyam Natarajan
Auto-TLDR; Real-Time Detection of Driver Drowsiness using Facial Action Units using Extreme Gradient Boosting
Abstract Slides Poster Similar
Siamese Fully Convolutional Tracker with Motion Correction
Mathew Francis, Prithwijit Guha

Auto-TLDR; A Siamese Ensemble for Visual Tracking with Appearance and Motion Components
Abstract Slides Poster Similar
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
Removing Raindrops from a Single Image Using Synthetic Data
Yoshihito Kokubo, Shusaku Asada, Hirotaka Maruyama, Masaru Koide, Kohei Yamamoto, Yoshihisa Suetsugu
Auto-TLDR; Raindrop Removal Using Synthetic Raindrop Data
Abstract Slides Poster Similar