OmniFlowNet: A Perspective Neural Network Adaptation for Optical Flow Estimation in Omnidirectional Images
Charles-Olivier Artizzu,
Haozhou Zhang,
Guillaume Allibert,
Cédric Demonceaux

Auto-TLDR; OmniFlowNet: A Convolutional Neural Network for Omnidirectional Optical Flow Estimation
Similar papers
Revisiting Optical Flow Estimation in 360 Videos
Keshav Bhandari, Ziliang Zong, Yan Yan
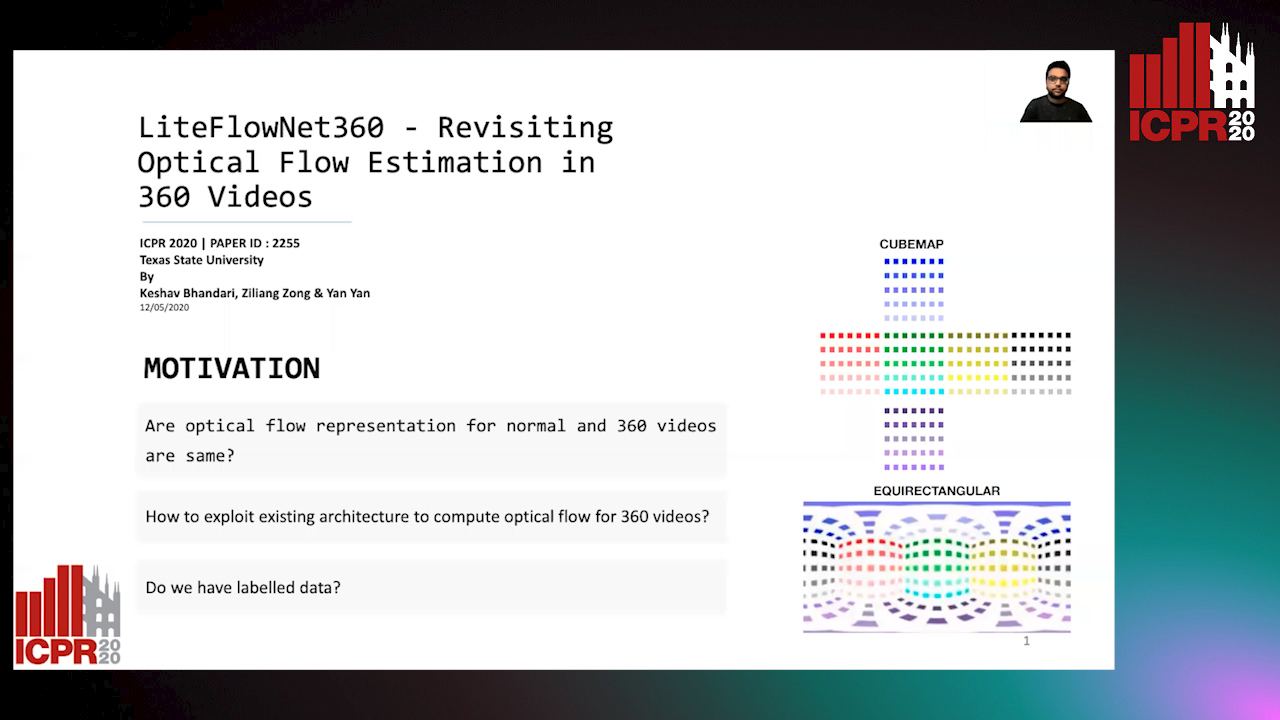
Auto-TLDR; LiteFlowNet360: A Domain Adaptation Framework for 360 Video Optical Flow Estimation
PA-FlowNet: Pose-Auxiliary Optical Flow Network for Spacecraft Relative Pose Estimation
Zhi Yu Chen, Po-Heng Chen, Kuan-Wen Chen, Chen-Yu Chan
Auto-TLDR; PA-FlowNet: An End-to-End Pose-auxiliary Optical Flow Network for Space Travel and Landing
Abstract Slides Poster Similar
HMFlow: Hybrid Matching Optical Flow Network for Small and Fast-Moving Objects
Suihanjin Yu, Youmin Zhang, Chen Wang, Xiao Bai, Liang Zhang, Edwin Hancock
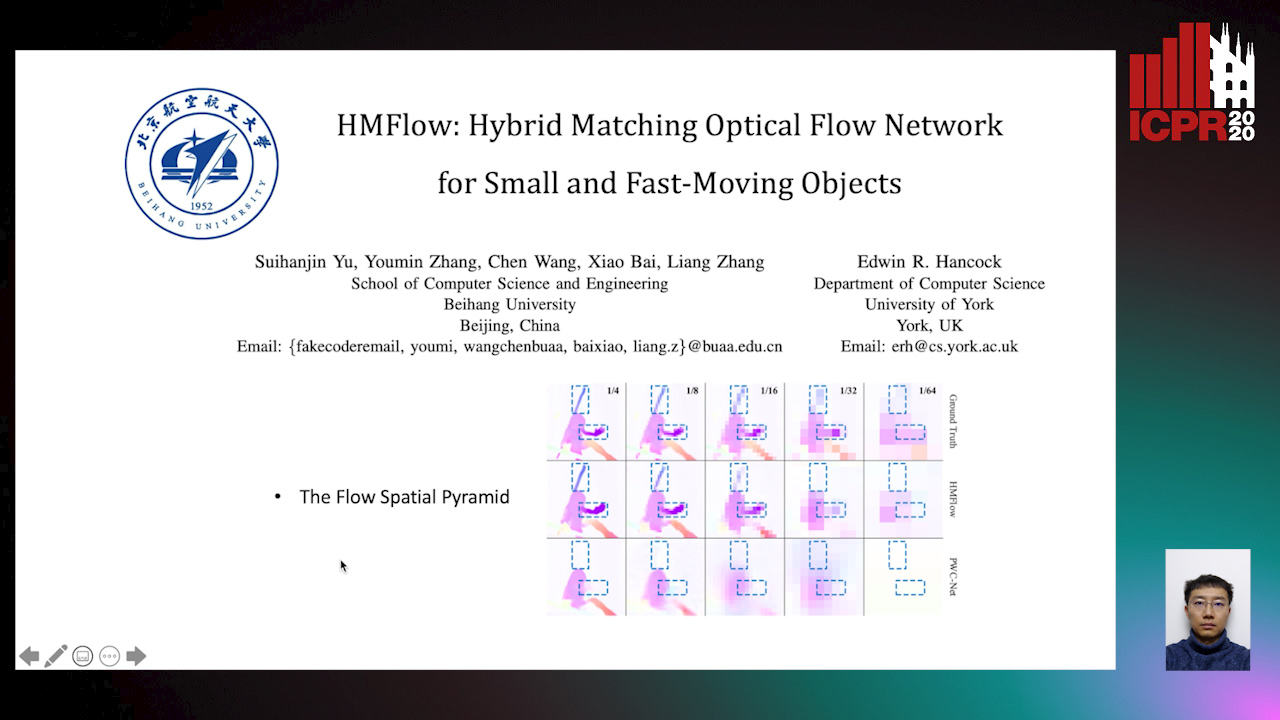
Auto-TLDR; Hybrid Matching Optical Flow Network with Global Matching Component
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
STaRFlow: A SpatioTemporal Recurrent Cell for Lightweight Multi-Frame Optical Flow Estimation
Pierre Godet, Alexandre Boulch, Aurélien Plyer, Guy Le Besnerais
Auto-TLDR; STaRFlow: A lightweight CNN-based algorithm for optical flow estimation
Abstract Slides Poster Similar
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
ResFPN: Residual Skip Connections in Multi-Resolution Feature Pyramid Networks for Accurate Dense Pixel Matching
Rishav ., René Schuster, Ramy Battrawy, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Resolution Feature Pyramid Networks for Dense Pixel Matching
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
Distortion-Adaptive Grape Bunch Counting for Omnidirectional Images
Ryota Akai, Yuzuko Utsumi, Yuka Miwa, Masakazu Iwamura, Koichi Kise
Auto-TLDR; Object Counting for Omnidirectional Images Using Stereographic Projection
Photometric Stereo with Twin-Fisheye Cameras
Jordan Caracotte, Fabio Morbidi, El Mustapha Mouaddib
Auto-TLDR; Photometric stereo problem for low-cost 360-degree cameras
Abstract Slides Poster Similar
Object Segmentation Tracking from Generic Video Cues
Amirhossein Kardoost, Sabine Müller, Joachim Weickert, Margret Keuper

Auto-TLDR; A Light-Weight Variational Framework for Video Object Segmentation in Videos
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
A Lightweight Network to Learn Optical Flow from Event Data

Auto-TLDR; A lightweight pyramid network with attention mechanism to learn optical flow from events data
Deep Homography-Based Video Stabilization
Maria Silvia Ito, Ebroul Izquierdo
Auto-TLDR; Video Stabilization using Deep Learning and Spatial Transformer Networks
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
SAILenv: Learning in Virtual Visual Environments Made Simple
Enrico Meloni, Luca Pasqualini, Matteo Tiezzi, Marco Gori, Stefano Melacci

Auto-TLDR; SAILenv: A Simple and Customized Platform for Visual Recognition in Virtual 3D Environment
Abstract Slides Poster Similar
User-Independent Gaze Estimation by Extracting Pupil Parameter and Its Mapping to the Gaze Angle

Auto-TLDR; Gaze Point Estimation using Pupil Shape for Generalization
Abstract Slides Poster Similar
Derivation of Geometrically and Semantically Annotated UAV Datasets at Large Scales from 3D City Models
Sidi Wu, Lukas Liebel, Marco Körner

Auto-TLDR; Large-Scale Dataset of Synthetic UAV Imagery for Geometric and Semantic Annotation
Abstract Slides Poster Similar
Polarimetric Image Augmentation
Marc Blanchon, Fabrice Meriaudeau, Olivier Morel, Ralph Seulin, Desire Sidibe

Auto-TLDR; Polarimetric Augmentation for Deep Learning in Robotics Applications
Estimating Gaze Points from Facial Landmarks by a Remote Spherical Camera
Auto-TLDR; Gaze Point Estimation from a Spherical Image from Facial Landmarks
Abstract Slides Poster Similar
Localization of Unmanned Aerial Vehicles in Corridor Environments Using Deep Learning
Ram Padhy, Shahzad Ahmad, Sachin Verma, Sambit Bakshi, Pankaj Kumar Sa
Auto-TLDR; A monocular vision assisted localization algorithm for indoor corridor environments
Abstract Slides Poster Similar
Learning Non-Rigid Surface Reconstruction from Spatio-Temporal Image Patches
Matteo Pedone, Abdelrahman Mostafa, Janne Heikkilä

Auto-TLDR; Dense Spatio-Temporal Depth Maps of Deformable Objects from Video Sequences
Abstract Slides Poster Similar
Estimation of Clinical Tremor Using Spatio-Temporal Adversarial AutoEncoder
Li Zhang, Vidya Koesmahargyo, Isaac Galatzer-Levy
Auto-TLDR; ST-AAE: Spatio-temporal Adversarial Autoencoder for Clinical Assessment of Hand Tremor Frequency and Severity
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Residual Learning of Video Frame Interpolation Using Convolutional LSTM
Auto-TLDR; Video Frame Interpolation Using Residual Learning and Convolutional LSTMs
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Position-Aware and Symmetry Enhanced GAN for Radial Distortion Correction
Yongjie Shi, Xin Tong, Jingsi Wen, He Zhao, Xianghua Ying, Jinshi Hongbin Zha
Auto-TLDR; Generative Adversarial Network for Radial Distorted Image Correction
Abstract Slides Poster Similar
Siamese Fully Convolutional Tracker with Motion Correction
Mathew Francis, Prithwijit Guha

Auto-TLDR; A Siamese Ensemble for Visual Tracking with Appearance and Motion Components
Abstract Slides Poster Similar
Audio-Video Detection of the Active Speaker in Meetings
Francisco Madrigal, Frederic Lerasle, Lionel Pibre, Isabelle Ferrané

Auto-TLDR; Active Speaker Detection with Visual and Contextual Information from Meeting Context
Abstract Slides Poster Similar
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
Learning Stereo Matchability in Disparity Regression Networks
Jingyang Zhang, Yao Yao, Zixin Luo, Shiwei Li, Tianwei Shen, Tian Fang, Long Quan
Auto-TLDR; Deep Stereo Matchability for Weakly Matchable Regions
Extraction and Analysis of 3D Kinematic Parameters of Table Tennis Ball from a Single Camera
Jordan Calandre, Renaud Péteri, Laurent Mascarilla, Benoit Tremblais
Auto-TLDR; 3D Ball Trajectories Analysis using a Single Camera for Sport Gesture Analysis
Abstract Slides Poster Similar
Generalized Shortest Path-Based Superpixels for Accurate Segmentation of Spherical Images
Rémi Giraud, Rodrigo Borba Pinheiro, Yannick Berthoumieu
Auto-TLDR; SPS: Spherical Shortest Path-based Superpixels
Abstract Slides Poster Similar
Leveraging a Weakly Adversarial Paradigm for Joint Learning of Disparity and Confidence Estimation
Matteo Poggi, Fabio Tosi, Filippo Aleotti, Stefano Mattoccia

Auto-TLDR; Joint Training of Deep-Networks for Outlier Detection from Stereo Images
Abstract Slides Poster Similar
Deeply-Fused Attentive Network for Stereo Matching
Zuliu Yang, Xindong Ai, Weida Yang, Yong Zhao, Qifei Dai, Fuchi Li

Auto-TLDR; DF-Net: Deep Learning-based Network for Stereo Matching
Abstract Slides Poster Similar
Human Segmentation with Dynamic LiDAR Data
Tao Zhong, Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi

Auto-TLDR; Spatiotemporal Neural Network for Human Segmentation with Dynamic Point Clouds
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
Removing Raindrops from a Single Image Using Synthetic Data
Yoshihito Kokubo, Shusaku Asada, Hirotaka Maruyama, Masaru Koide, Kohei Yamamoto, Yoshihisa Suetsugu
Auto-TLDR; Raindrop Removal Using Synthetic Raindrop Data
Abstract Slides Poster Similar
Mobile Augmented Reality: Fast, Precise, and Smooth Planar Object Tracking
Dmitrii Matveichev, Daw-Tung Lin

Auto-TLDR; Planar Object Tracking with Sparse Optical Flow Tracking and Descriptor Matching
Abstract Slides Poster Similar
Walk the Lines: Object Contour Tracing CNN for Contour Completion of Ships
Auto-TLDR; Walk the Lines: A Convolutional Neural Network trained to follow object contours
Abstract Slides Poster Similar
5D Light Field Synthesis from a Monocular Video
Kyuho Bae, Andre Ivan, Hajime Nagahara, In Kyu Park

Auto-TLDR; Synthesis of Light Field Video from Monocular Video using Deep Learning
Self-Supervised Joint Encoding of Motion and Appearance for First Person Action Recognition
Mirco Planamente, Andrea Bottino, Barbara Caputo

Auto-TLDR; A Single Stream Architecture for Egocentric Action Recognition from the First-Person Point of View
Abstract Slides Poster Similar
Generic Document Image Dewarping by Probabilistic Discretization of Vanishing Points
Gilles Simon, Salvatore Tabbone
Auto-TLDR; Robust Document Dewarping using vanishing points
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar