Walk the Lines: Object Contour Tracing CNN for Contour Completion of Ships
Auto-TLDR; Walk the Lines: A Convolutional Neural Network trained to follow object contours
Similar papers
Quantization in Relative Gradient Angle Domain for Building Polygon Estimation
Yuhao Chen, Yifan Wu, Linlin Xu, Alexander Wong
Auto-TLDR; Relative Gradient Angle Transform for Building Footprint Extraction from Remote Sensing Data
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
EdgeNet: Semantic Scene Completion from a Single RGB-D Image
Aloisio Dourado, Teofilo De Campos, Adrian Hilton, Hansung Kim

Auto-TLDR; Semantic Scene Completion using 3D Depth and RGB Information
Abstract Slides Poster Similar
RLST: A Reinforcement Learning Approach to Scene Text Detection Refinement
Xuan Peng, Zheng Huang, Kai Chen, Jie Guo, Weidong Qiu
Auto-TLDR; Saccadic Eye Movements and Peripheral Vision for Scene Text Detection using Reinforcement Learning
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
Coarse to Fine: Progressive and Multi-Task Learning for Salient Object Detection
Dong-Goo Kang, Sangwoo Park, Joonki Paik
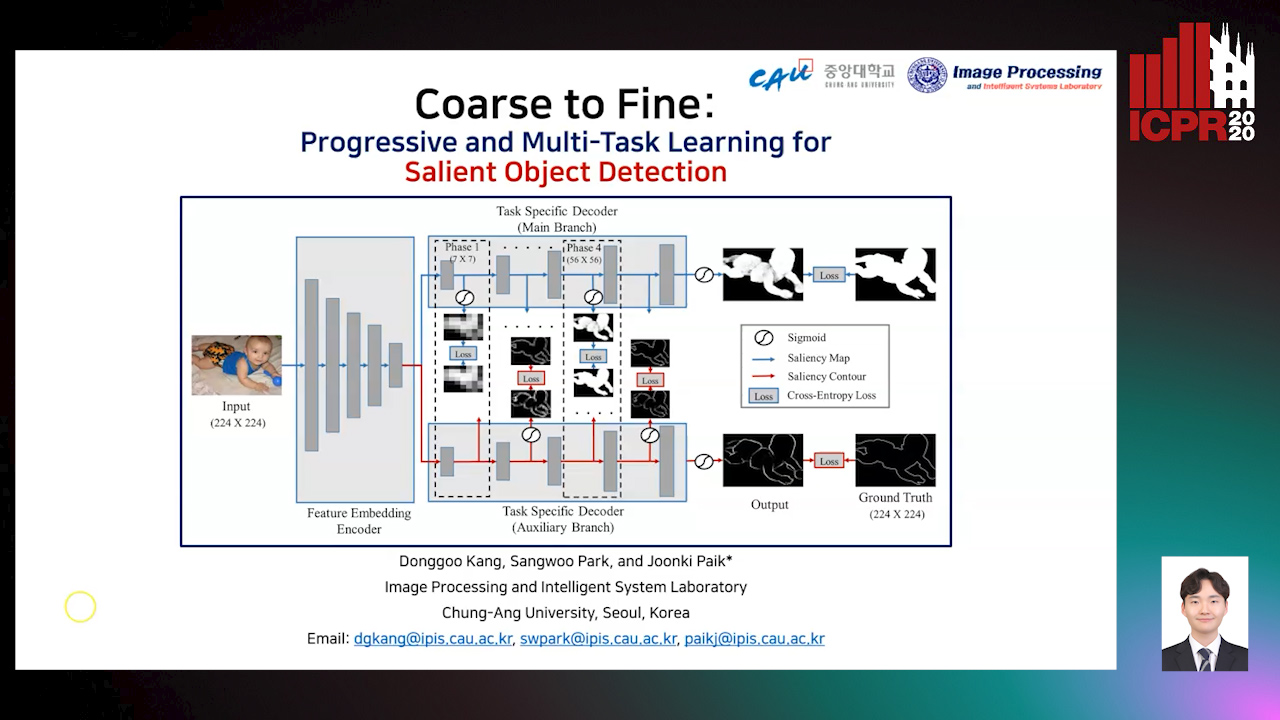
Auto-TLDR; Progressive and mutl-task learning scheme for salient object detection
Abstract Slides Poster Similar
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Approach for Document Detection by Contours and Contrasts
Daniil Tropin, Sergey Ilyuhin, Dmitry Nikolaev, Vladimir V. Arlazarov
Auto-TLDR; A countor-based method for arbitrary document detection on a mobile device
Abstract Slides Poster Similar
Domain Siamese CNNs for Sparse Multispectral Disparity Estimation
David-Alexandre Beaupre, Guillaume-Alexandre Bilodeau

Auto-TLDR; Multispectral Disparity Estimation between Thermal and Visible Images using Deep Neural Networks
Abstract Slides Poster Similar
A Fast and Accurate Object Detector for Handwritten Digit String Recognition
Jun Guo, Wenjing Wei, Yifeng Ma, Cong Peng
Auto-TLDR; ChipNet: An anchor-free object detector for handwritten digit string recognition
Abstract Slides Poster Similar
Directional Graph Networks with Hard Weight Assignments
Miguel Dominguez, Raymond Ptucha
Auto-TLDR; Hard Directional Graph Networks for Point Cloud Analysis
Abstract Slides Poster Similar
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
Recovery of 2D and 3D Layout Information through an Advanced Image Stitching Algorithm Using Scanning Electron Microscope Images
Aayush Singla, Bernhard Lippmann, Helmut Graeb
Auto-TLDR; Image Stitching for True Geometrical Layout Recovery in Nanoscale Dimension
Abstract Slides Poster Similar
Global-Local Attention Network for Semantic Segmentation in Aerial Images
Minglong Li, Lianlei Shan, Weiqiang Wang

Auto-TLDR; GLANet: Global-Local Attention Network for Semantic Segmentation
Abstract Slides Poster Similar
Learning to Segment Clustered Amoeboid Cells from Brightfield Microscopy Via Multi-Task Learning with Adaptive Weight Selection
Rituparna Sarkar, Suvadip Mukherjee, Elisabeth Labruyere, Jean-Christophe Olivo-Marin
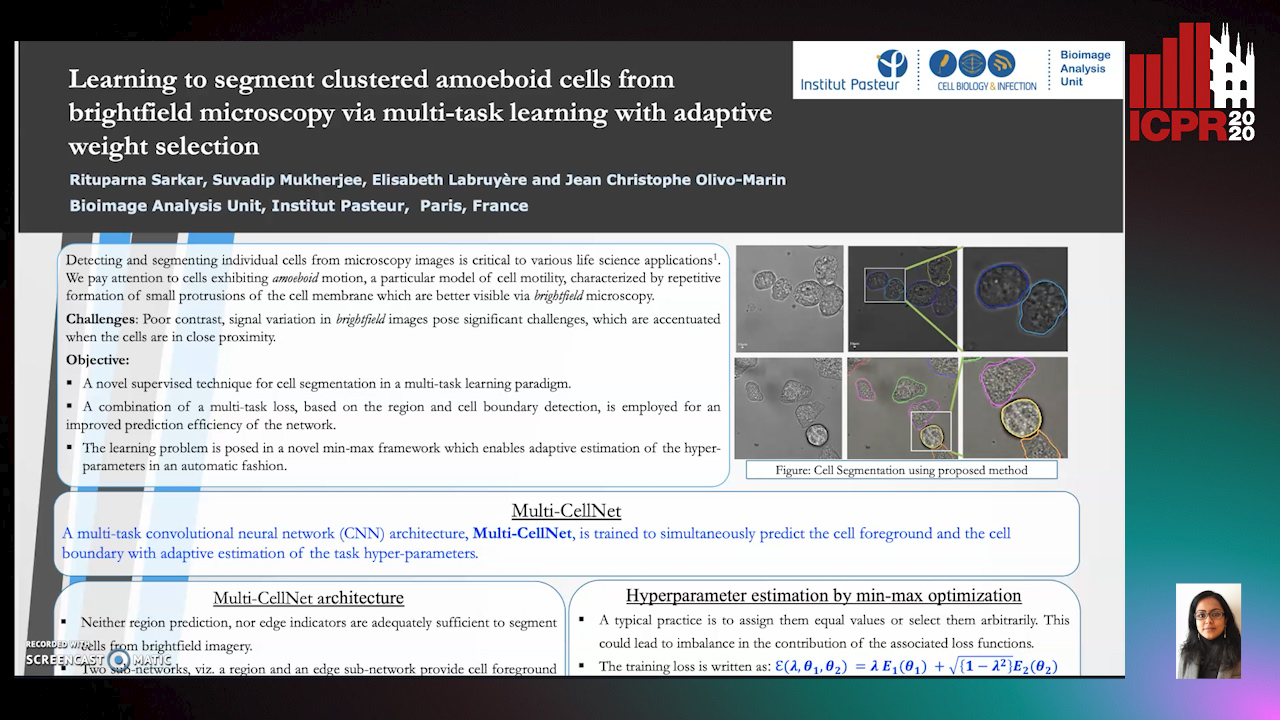
Auto-TLDR; Supervised Cell Segmentation from Microscopy Images using Multi-task Learning in a Multi-Task Learning Paradigm
Automatically Gather Address Specific Dwelling Images Using Google Street View
Auto-TLDR; Automatic Address Specific Dwelling Image Collection Using Google Street View Data
Abstract Slides Poster Similar
Hierarchical Head Design for Object Detectors
Shivang Agarwal, Frederic Jurie
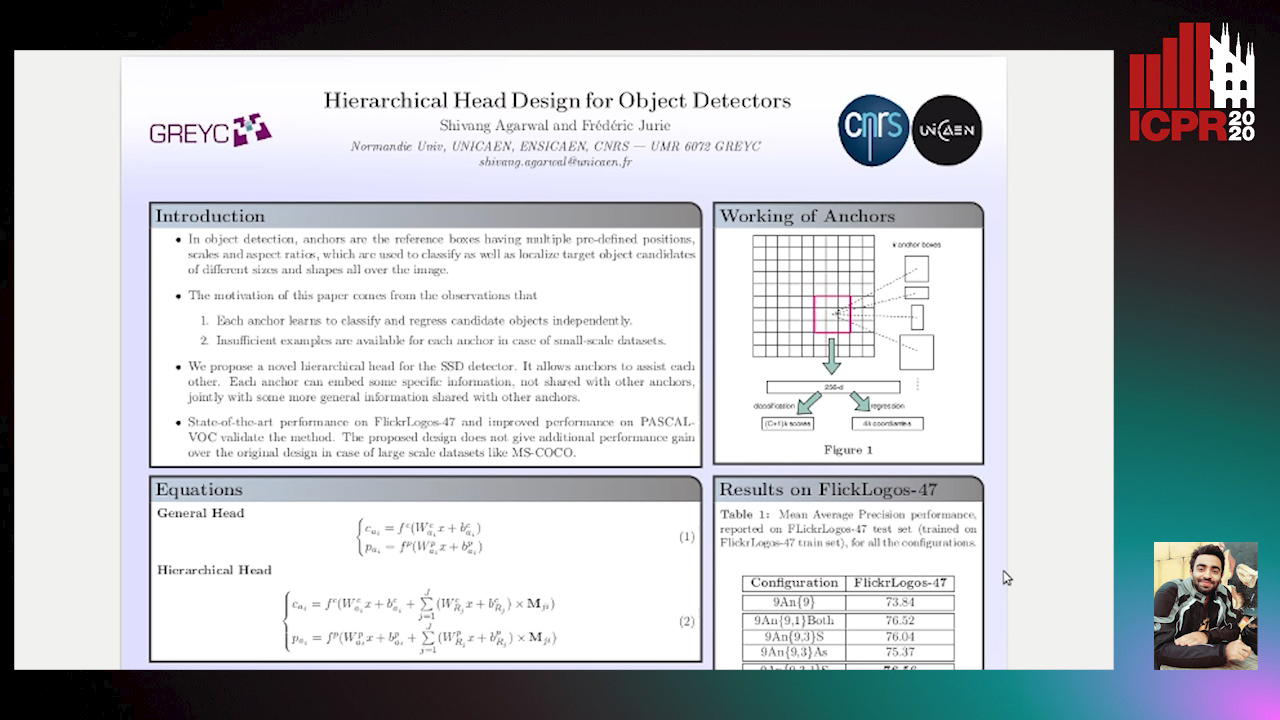
Auto-TLDR; Hierarchical Anchor for SSD Detector
Abstract Slides Poster Similar
Handwritten Digit String Recognition Using Deep Autoencoder Based Segmentation and ResNet Based Recognition Approach
Anuran Chakraborty, Rajonya De, Samir Malakar, Friedhelm Schwenker, Ram Sarkar
Auto-TLDR; Handwritten Digit Strings Recognition Using Residual Network and Deep Autoencoder Based Segmentation
Abstract Slides Poster Similar
Machine-Learned Regularization and Polygonization of Building Segmentation Masks
Stefano Zorzi, Ksenia Bittner, Friedrich Fraundorfer

Auto-TLDR; Automatic Regularization and Polygonization of Building Segmentation masks using Generative Adversarial Network
Abstract Slides Poster Similar
Uncertainty Guided Recognition of Tiny Craters on the Moon
Thorsten Wilhelm, Christian Wöhler

Auto-TLDR; Accurately Detecting Tiny Craters in Remote Sensed Images Using Deep Neural Networks
Abstract Slides Poster Similar
Multi-View Object Detection Using Epipolar Constraints within Cluttered X-Ray Security Imagery
Brian Kostadinov Shalon Isaac-Medina, Chris G. Willcocks, Toby Breckon

Auto-TLDR; Exploiting Epipolar Constraints for Multi-View Object Detection in X-ray Security Images
Abstract Slides Poster Similar
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar
Lane Detection Based on Object Detection and Image-To-Image Translation
Hiroyuki Komori, Kazunori Onoguchi

Auto-TLDR; Lane Marking and Road Boundary Detection from Monocular Camera Images using Inverse Perspective Mapping
Abstract Slides Poster Similar
Superpixel-Based Refinement for Object Proposal Generation
Christian Wilms, Simone Frintrop
Auto-TLDR; Superpixel-based Refinement of AttentionMask for Object Segmentation
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Learning Defects in Old Movies from Manually Assisted Restoration
Arthur Renaudeau, Travis Seng, Axel Carlier, Jean-Denis Durou, Fabien Pierre, Francois Lauze, Jean-François Aujol
Auto-TLDR; U-Net: Detecting Defects in Old Movies by Inpainting Techniques
Abstract Slides Poster Similar
Object Segmentation Tracking from Generic Video Cues
Amirhossein Kardoost, Sabine Müller, Joachim Weickert, Margret Keuper

Auto-TLDR; A Light-Weight Variational Framework for Video Object Segmentation in Videos
Abstract Slides Poster Similar
Semantic Segmentation Refinement Using Entropy and Boundary-guided Monte Carlo Sampling and Directed Regional Search
Zitang Sun, Sei-Ichiro Kamata, Ruojing Wang, Weili Chen
Auto-TLDR; Directed Region Search and Refinement for Semantic Segmentation
Abstract Slides Poster Similar
Siamese Dynamic Mask Estimation Network for Fast Video Object Segmentation
Dexiang Hong, Guorong Li, Kai Xu, Li Su, Qingming Huang

Auto-TLDR; Siamese Dynamic Mask Estimation for Video Object Segmentation
Abstract Slides Poster Similar
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
Enhancing Semantic Segmentation of Aerial Images with Inhibitory Neurons
Ihsan Ullah, Sean Reilly, Michael Madden
Auto-TLDR; Lateral Inhibition in Deep Neural Networks for Object Recognition and Semantic Segmentation
Abstract Slides Poster Similar
BP-Net: Deep Learning-Based Superpixel Segmentation for RGB-D Image
Bin Zhang, Xuejing Kang, Anlong Ming
Auto-TLDR; A Deep Learning-based Superpixel Segmentation Algorithm for RGB-D Image
Abstract Slides Poster Similar
ActionSpotter: Deep Reinforcement Learning Framework for Temporal Action Spotting in Videos
Guillaume Vaudaux-Ruth, Adrien Chan-Hon-Tong, Catherine Achard
Auto-TLDR; ActionSpotter: A Reinforcement Learning Algorithm for Action Spotting in Video
Abstract Slides Poster Similar
FourierNet: Compact Mask Representation for Instance Segmentation Using Differentiable Shape Decoders
Hamd Ul Moqeet Riaz, Nuri Benbarka, Andreas Zell

Auto-TLDR; FourierNet: A Single shot, anchor-free, fully convolutional instance segmentation method that predicts a shape vector
Abstract Slides Poster Similar
A Versatile Crack Inspection Portable System Based on Classifier Ensemble and Controlled Illumination
Milind Gajanan Padalkar, Carlos Beltran-Gonzalez, Matteo Bustreo, Alessio Del Bue, Vittorio Murino
Auto-TLDR; Lighting Conditions for Crack Detection in Ceramic Tile
Abstract Slides Poster Similar
Detective: An Attentive Recurrent Model for Sparse Object Detection
Amine Kechaou, Manuel Martinez, Monica Haurilet, Rainer Stiefelhagen

Auto-TLDR; Detective: An attentive object detector that identifies objects in images in a sequential manner
Abstract Slides Poster Similar
DualBox: Generating BBox Pair with Strong Correspondence Via Occlusion Pattern Clustering and Proposal Refinement
Zheng Ge, Chuyu Hu, Xin Huang, Baiqiao Qiu, Osamu Yoshie
Auto-TLDR; R2NMS: Combining Full and Visible Body Bounding Box for Dense Pedestrian Detection
Abstract Slides Poster Similar
OmniFlowNet: A Perspective Neural Network Adaptation for Optical Flow Estimation in Omnidirectional Images
Charles-Olivier Artizzu, Haozhou Zhang, Guillaume Allibert, Cédric Demonceaux

Auto-TLDR; OmniFlowNet: A Convolutional Neural Network for Omnidirectional Optical Flow Estimation
Abstract Slides Poster Similar
Polarimetric Image Augmentation
Marc Blanchon, Fabrice Meriaudeau, Olivier Morel, Ralph Seulin, Desire Sidibe

Auto-TLDR; Polarimetric Augmentation for Deep Learning in Robotics Applications
Aggregating Object Features Based on Attention Weights for Fine-Grained Image Retrieval
Hongli Lin, Yongqi Song, Zixuan Zeng, Weisheng Wang

Auto-TLDR; DSAW: Unsupervised Dual-selection for Fine-Grained Image Retrieval
FeatureNMS: Non-Maximum Suppression by Learning Feature Embeddings

Auto-TLDR; FeatureNMS: Non-Maximum Suppression for Multiple Object Detection
Abstract Slides Poster Similar
Force Banner for the Recognition of Spatial Relations
Robin Deléarde, Camille Kurtz, Laurent Wendling, Philippe Dejean
Auto-TLDR; Spatial Relation Recognition using Force Banners
CASNet: Common Attribute Support Network for Image Instance and Panoptic Segmentation
Xiaolong Liu, Yuqing Hou, Anbang Yao, Yurong Chen, Keqiang Li

Auto-TLDR; Common Attribute Support Network for instance segmentation and panoptic segmentation
Abstract Slides Poster Similar
Image Sequence Based Cyclist Action Recognition Using Multi-Stream 3D Convolution
Stefan Zernetsch, Steven Schreck, Viktor Kress, Konrad Doll, Bernhard Sick

Auto-TLDR; 3D-ConvNet: A Multi-stream 3D Convolutional Neural Network for Detecting Cyclists in Real World Traffic Situations
Abstract Slides Poster Similar
SECI-GAN: Semantic and Edge Completion for Dynamic Objects Removal
Francesco Pinto, Andrea Romanoni, Matteo Matteucci, Phil Torr
Auto-TLDR; SECI-GAN: Semantic and Edge Conditioned Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
BiLuNet: A Multi-Path Network for Semantic Segmentation on X-Ray Images
Van Luan Tran, Huei-Yung Lin, Rachel Liu, Chun-Han Tseng, Chun-Han Tseng

Auto-TLDR; BiLuNet: Multi-path Convolutional Neural Network for Semantic Segmentation of Lumbar vertebrae, sacrum,
Level Three Synthetic Fingerprint Generation
Andre Wyzykowski, Mauricio Pamplona Segundo, Rubisley Lemes
Auto-TLDR; Synthesis of High-Resolution Fingerprints with Pore Detection Using CycleGAN
Abstract Slides Poster Similar