Recovery of 2D and 3D Layout Information through an Advanced Image Stitching Algorithm Using Scanning Electron Microscope Images
Aayush Singla,
Bernhard Lippmann,
Helmut Graeb
Auto-TLDR; Image Stitching for True Geometrical Layout Recovery in Nanoscale Dimension
Similar papers
Localization and Transformation Reconstruction of Image Regions: An Extended Congruent Triangles Approach
Afra'A Ahmad Alyosef, Christian Elias, Andreas Nürnberger

Auto-TLDR; Outlier Filtering of Sub-Image Relations using Geometrical Information
Abstract Slides Poster Similar
ID Documents Matching and Localization with Multi-Hypothesis Constraints
Guillaume Chiron, Nabil Ghanmi, Ahmad Montaser Awal
Auto-TLDR; Identity Document Localization in the Wild Using Multi-hypothesis Exploration
Abstract Slides Poster Similar
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
3D Pots Configuration System by Optimizing Over Geometric Constraints
Jae Eun Kim, Muhammad Zeeshan Arshad, Seong Jong Yoo, Je Hyeong Hong, Jinwook Kim, Young Min Kim

Auto-TLDR; Optimizing 3D Configurations for Stable Pottery Restoration from irregular and noisy evidence
Abstract Slides Poster Similar
Semi-Supervised Deep Learning Techniques for Spectrum Reconstruction
Adriano Simonetto, Vincent Parret, Alexander Gatto, Piergiorgio Sartor, Pietro Zanuttigh
Auto-TLDR; hyperspectral data estimation from RGB data using semi-supervised learning
Abstract Slides Poster Similar
Graph-Based Image Decoding for Multiplexed in Situ RNA Detection
Gabriele Partel, Carolina Wahlby
Auto-TLDR; A Graph-based Decoding Approach for Multiplexed In situ RNA Detection
Can You Trust Your Pose? Confidence Estimation in Visual Localization
Luca Ferranti, Xiaotian Li, Jani Boutellier, Juho Kannala

Auto-TLDR; Pose Confidence Estimation in Large-Scale Environments: A Light-weight Approach to Improving Pose Estimation Pipeline
Abstract Slides Poster Similar
Walk the Lines: Object Contour Tracing CNN for Contour Completion of Ships
Auto-TLDR; Walk the Lines: A Convolutional Neural Network trained to follow object contours
Abstract Slides Poster Similar
A Plane-Based Approach for Indoor Point Clouds Registration
Ketty Favre, Muriel Pressigout, Luce Morin, Eric Marchand

Auto-TLDR; A plane-based registration approach for indoor environments based on LiDAR data
Abstract Slides Poster Similar
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
Robust Skeletonization for Plant Root Structure Reconstruction from MRI
Auto-TLDR; Structural reconstruction of plant roots from MRI using semantic root vs shoot segmentation and 3D skeletonization
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Learning to Segment Clustered Amoeboid Cells from Brightfield Microscopy Via Multi-Task Learning with Adaptive Weight Selection
Rituparna Sarkar, Suvadip Mukherjee, Elisabeth Labruyere, Jean-Christophe Olivo-Marin
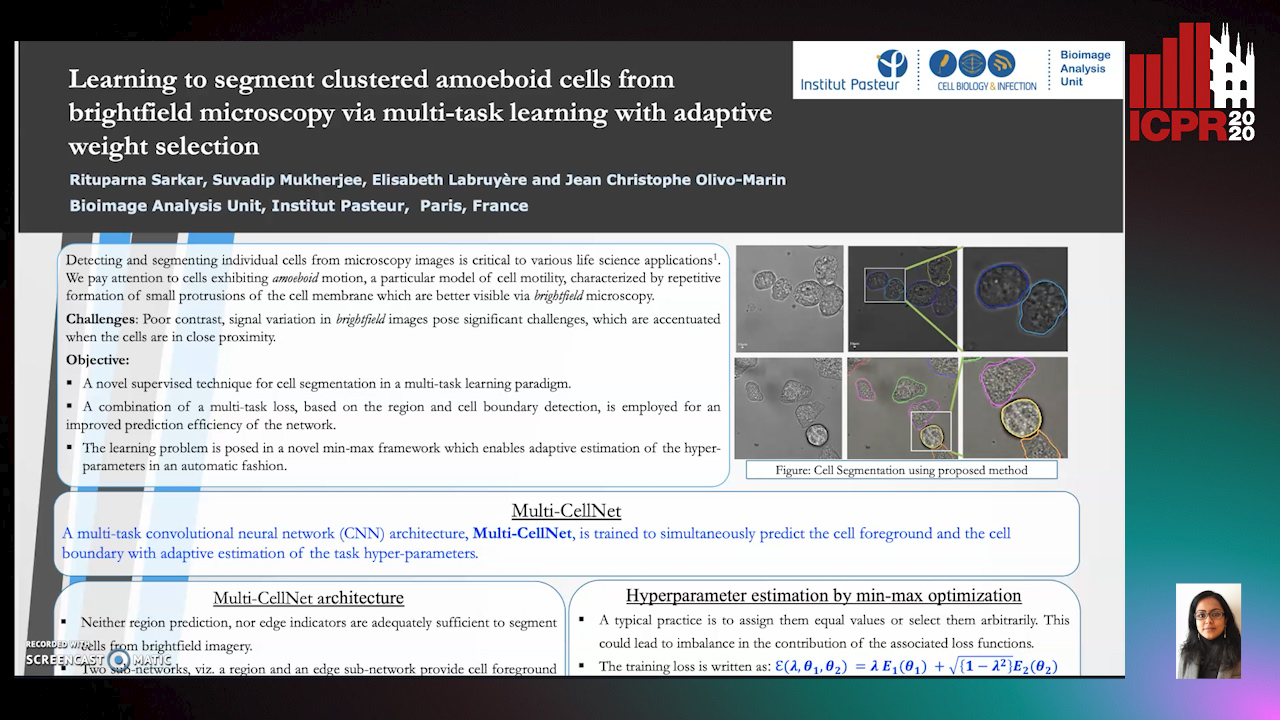
Auto-TLDR; Supervised Cell Segmentation from Microscopy Images using Multi-task Learning in a Multi-Task Learning Paradigm
Transferable Model for Shape Optimization subject to Physical Constraints
Lukas Harsch, Johannes Burgbacher, Stefan Riedelbauch
Auto-TLDR; U-Net with Spatial Transformer Network for Flow Simulations
Abstract Slides Poster Similar
Trainable Spectrally Initializable Matrix Transformations in Convolutional Neural Networks
Michele Alberti, Angela Botros, Schuetz Narayan, Rolf Ingold, Marcus Liwicki, Mathias Seuret
Auto-TLDR; Trainable and Spectrally Initializable Matrix Transformations for Neural Networks
Abstract Slides Poster Similar
Hyperspectral Imaging for Analysis and Classification of Plastic Waste
Jakub Kraśniewski, Łukasz Dąbała, Lewandowski Marcin

Auto-TLDR; A Hyperspectral Camera for Material Classification
Abstract Slides Poster Similar
3D Point Cloud Registration Based on Cascaded Mutual Information Attention Network
Auto-TLDR; Cascaded Mutual Information Attention Network for 3D Point Cloud Registration
Abstract Slides Poster Similar
3D Facial Matching by Spiral Convolutional Metric Learning and a Biometric Fusion-Net of Demographic Properties
Soha Sadat Mahdi, Nele Nauwelaers, Philip Joris, Giorgos Bouritsas, Imperial London, Sergiy Bokhnyak, Susan Walsh, Mark Shriver, Michael Bronstein, Peter Claes
Auto-TLDR; Multi-biometric Fusion for Biometric Verification using 3D Facial Mesures
Cost Volume Refinement for Depth Prediction
João L. Cardoso, Nuno Goncalves, Michael Wimmer

Auto-TLDR; Refining the Cost Volume for Depth Prediction from Light Field Cameras
Abstract Slides Poster Similar
Learning to Find Good Correspondences of Multiple Objects
Youye Xie, Yingheng Tang, Gongguo Tang, William Hoff
Auto-TLDR; Multi-Object Inliers and Outliers for Perspective-n-Point and Object Recognition
Abstract Slides Poster Similar
On Identification and Retrieval of Near-Duplicate Biological Images: A New Dataset and Protocol
Thomas E. Koker, Sai Spandana Chintapalli, San Wang, Blake A. Talbot, Daniel Wainstock, Marcelo Cicconet, Mary C. Walsh

Auto-TLDR; BINDER: Bio-Image Near-Duplicate Examples Repository for Image Identification and Retrieval
Fused 3-Stage Image Segmentation for Pleural Effusion Cell Clusters
Sike Ma, Meng Zhao, Hao Wang, Fan Shi, Xuguo Sun, Shengyong Chen, Hong-Ning Dai
Auto-TLDR; Coarse Segmentation of Stained and Stained Unstained Cell Clusters in pleural effusion using 3-stage segmentation method
Abstract Slides Poster Similar
Domain Siamese CNNs for Sparse Multispectral Disparity Estimation
David-Alexandre Beaupre, Guillaume-Alexandre Bilodeau

Auto-TLDR; Multispectral Disparity Estimation between Thermal and Visible Images using Deep Neural Networks
Abstract Slides Poster Similar
A Joint Super-Resolution and Deformable Registration Network for 3D Brain Images
Auto-TLDR; Joint Super-Resolution and Deformable Image Registration with Super-resolution
Abstract Slides Poster Similar
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
An Integrated Approach of Deep Learning and Symbolic Analysis for Digital PDF Table Extraction
Mengshi Zhang, Daniel Perelman, Vu Le, Sumit Gulwani
Auto-TLDR; Deep Learning and Symbolic Reasoning for Unstructured PDF Table Extraction
Abstract Slides Poster Similar
Inferring Functional Properties from Fluid Dynamics Features
Andrea Schillaci, Maurizio Quadrio, Carlotta Pipolo, Marcello Restelli, Giacomo Boracchi
Auto-TLDR; Exploiting Convective Properties of Computational Fluid Dynamics for Medical Diagnosis
Abstract Slides Poster Similar
The HisClima Database: Historical Weather Logs for Automatic Transcription and Information Extraction
Verónica Romero, Joan Andreu Sánchez
Auto-TLDR; Automatic Handwritten Text Recognition and Information Extraction from Historical Weather Logs
Abstract Slides Poster Similar
A Comparison of Neural Network Approaches for Melanoma Classification
Maria Frasca, Michele Nappi, Michele Risi, Genoveffa Tortora, Alessia Auriemma Citarella
Auto-TLDR; Classification of Melanoma Using Deep Neural Network Methodologies
Abstract Slides Poster Similar
Improving Image Matching with Varied Illumination
Auto-TLDR; Optimizing Feature Matching for Stereo Image Pairs by Stereo Illumination
Abstract Slides Poster Similar
Automatic Semantic Segmentation of Structural Elements related to the Spinal Cord in the Lumbar Region by Using Convolutional Neural Networks
Jhon Jairo Sáenz Gamboa, Maria De La Iglesia-Vaya, Jon Ander Gómez
Auto-TLDR; Semantic Segmentation of Lumbar Spine Using Convolutional Neural Networks
Abstract Slides Poster Similar
Extended Depth of Field Preserving Color Fidelity for Automated Digital Cytology
Alexandre Bouyssoux, Riadh Fezzani, Jean-Christophe Olivo-Marin
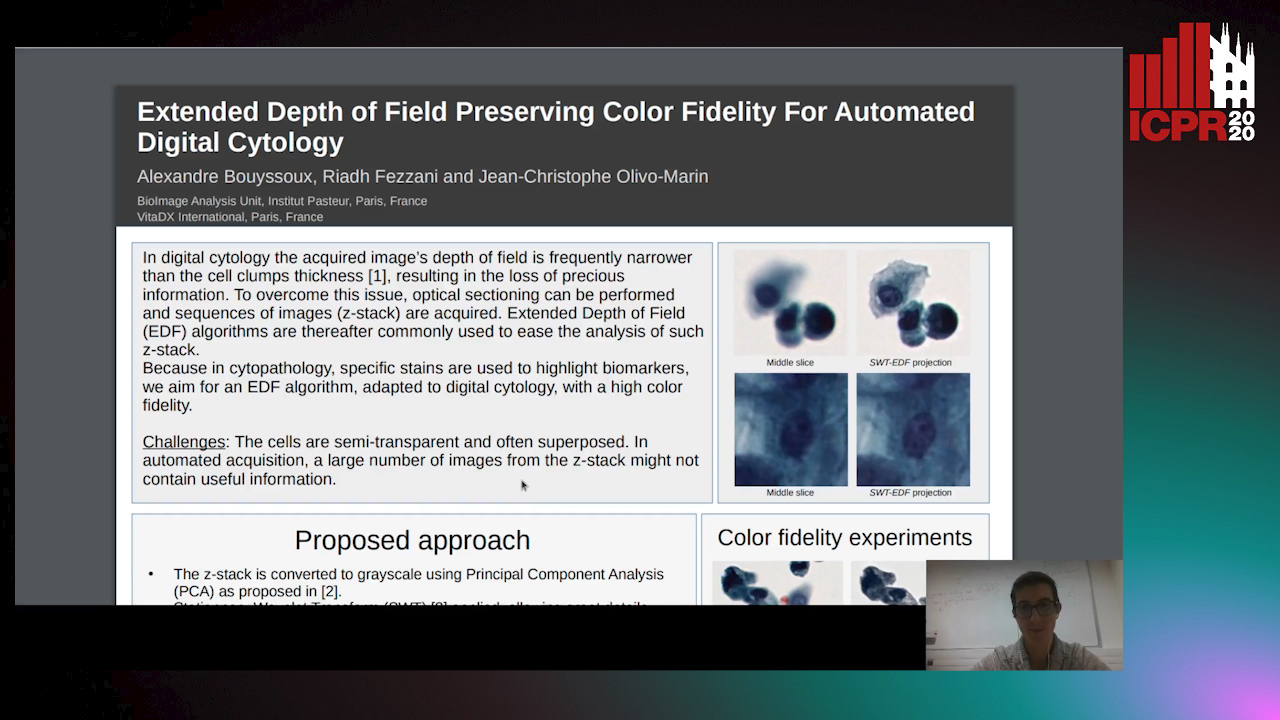
Auto-TLDR; Multi-Channel Extended Depth of Field for Digital cytology based on the stationary wavelet transform
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Street-Map Based Validation of Semantic Segmentation in Autonomous Driving
Laura Von Rueden, Tim Wirtz, Fabian Hueger, Jan David Schneider, Nico Piatkowski, Christian Bauckhage

Auto-TLDR; Semantic Segmentation Mask Validation Using A-priori Knowledge from Street Maps
Abstract Slides Poster Similar
Multi-View Object Detection Using Epipolar Constraints within Cluttered X-Ray Security Imagery
Brian Kostadinov Shalon Isaac-Medina, Chris G. Willcocks, Toby Breckon

Auto-TLDR; Exploiting Epipolar Constraints for Multi-View Object Detection in X-ray Security Images
Abstract Slides Poster Similar
Detecting Marine Species in Echograms Via Traditional, Hybrid, and Deep Learning Frameworks
Porto Marques Tunai, Alireza Rezvanifar, Melissa Cote, Alexandra Branzan Albu, Kaan Ersahin, Todd Mudge, Stephane Gauthier
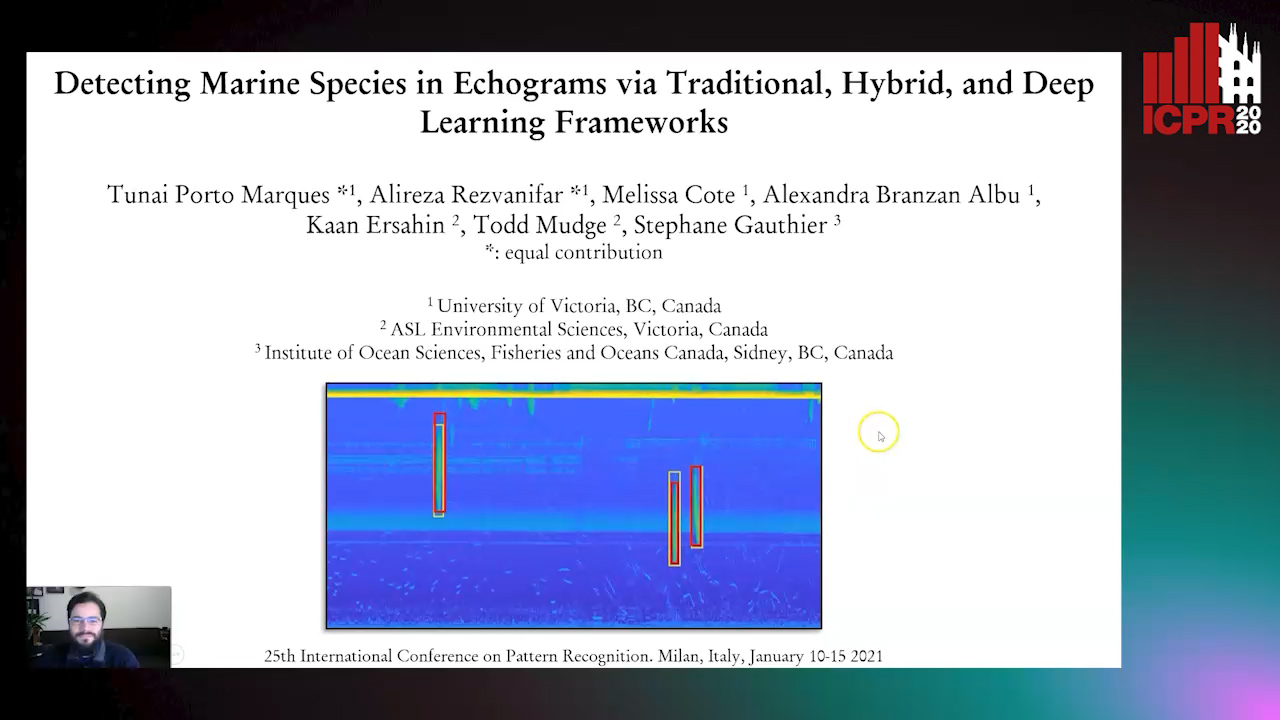
Auto-TLDR; End-to-End Deep Learning for Echogram Interpretation of Marine Species in Echograms
Abstract Slides Poster Similar
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Gabrielle Flood, David Gillsjö, Patrik Persson, Anders Heyden, Kalle Åström

Auto-TLDR; A Low-Memory Footprint Representation for Robust Map Merge
Abstract Slides Poster Similar
Learning Knowledge-Rich Sequential Model for Planar Homography Estimation in Aerial Video

Auto-TLDR; Sequential Estimation of Planar Homographic Transformations over Aerial Videos
Abstract Slides Poster Similar
Dimensionality Reduction for Data Visualization and Linear Classification, and the Trade-Off between Robustness and Classification Accuracy
Martin Becker, Jens Lippel, Thomas Zielke
Auto-TLDR; Robustness Assessment of Deep Autoencoder for Data Visualization using Scatter Plots
Abstract Slides Poster Similar
Documents Counterfeit Detection through a Deep Learning Approach
Darwin Danilo Saire Pilco, Salvatore Tabbone
Auto-TLDR; End-to-End Learning for Counterfeit Documents Detection using Deep Neural Network
Abstract Slides Poster Similar
Feature Engineering and Stacked Echo State Networks for Musical Onset Detection
Peter Steiner, Azarakhsh Jalalvand, Simon Stone, Peter Birkholz
Auto-TLDR; Echo State Networks for Onset Detection in Music Analysis
Abstract Slides Poster Similar
Segmentation of Axillary and Supraclavicular Tumoral Lymph Nodes in PET/CT: A Hybrid CNN/Component-Tree Approach
Diana Lucia Farfan Cabrera, Nicolas Gogin, David Morland, Benoît Naegel, Dimitri Papathanassiou, Nicolas Passat
Auto-TLDR; Coupling Convolutional Neural Networks and Component-Trees for Lymph node Segmentation from PET/CT Images
Approach for Document Detection by Contours and Contrasts
Daniil Tropin, Sergey Ilyuhin, Dmitry Nikolaev, Vladimir V. Arlazarov
Auto-TLDR; A countor-based method for arbitrary document detection on a mobile device
Abstract Slides Poster Similar
A Two-Step Approach to Lidar-Camera Calibration
Yingna Su, Yaqing Ding, Jian Yang, Hui Kong

Auto-TLDR; Closed-Form Calibration of Lidar-camera System for Ego-motion Estimation and Scene Understanding
Abstract Slides Poster Similar
Rotation Detection in Finger Vein Biometrics Using CNNs
Bernhard Prommegger, Georg Wimmer, Andreas Uhl
Auto-TLDR; A CNN based rotation detector for finger vein recognition
Abstract Slides Poster Similar
Level Three Synthetic Fingerprint Generation
Andre Wyzykowski, Mauricio Pamplona Segundo, Rubisley Lemes
Auto-TLDR; Synthesis of High-Resolution Fingerprints with Pore Detection Using CycleGAN
Abstract Slides Poster Similar
Automated Whiteboard Lecture Video Summarization by Content Region Detection and Representation
Bhargava Urala Kota, Alexander Stone, Kenny Davila, Srirangaraj Setlur, Venu Govindaraju
Auto-TLDR; A Framework for Summarizing Whiteboard Lecture Videos Using Feature Representations of Handwritten Content Regions