Graph-Based Image Decoding for Multiplexed in Situ RNA Detection
Gabriele Partel,
Carolina Wahlby
Auto-TLDR; A Graph-based Decoding Approach for Multiplexed In situ RNA Detection
Similar papers
Recovery of 2D and 3D Layout Information through an Advanced Image Stitching Algorithm Using Scanning Electron Microscope Images
Aayush Singla, Bernhard Lippmann, Helmut Graeb
Auto-TLDR; Image Stitching for True Geometrical Layout Recovery in Nanoscale Dimension
Abstract Slides Poster Similar
From Certain to Uncertain: Toward Optimal Solution for Offline Multiple Object Tracking
Kaikai Zhao, Takashi Imaseki, Hiroshi Mouri, Einoshin Suzuki, Tetsu Matsukawa
Auto-TLDR; Agglomerative Hierarchical Clustering with Ensemble of Tracking Experts for Object Tracking
Abstract Slides Poster Similar
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
Uncertainty Guided Recognition of Tiny Craters on the Moon
Thorsten Wilhelm, Christian Wöhler

Auto-TLDR; Accurately Detecting Tiny Craters in Remote Sensed Images Using Deep Neural Networks
Abstract Slides Poster Similar
Robust Skeletonization for Plant Root Structure Reconstruction from MRI
Auto-TLDR; Structural reconstruction of plant roots from MRI using semantic root vs shoot segmentation and 3D skeletonization
Abstract Slides Poster Similar
3D Pots Configuration System by Optimizing Over Geometric Constraints
Jae Eun Kim, Muhammad Zeeshan Arshad, Seong Jong Yoo, Je Hyeong Hong, Jinwook Kim, Young Min Kim

Auto-TLDR; Optimizing 3D Configurations for Stable Pottery Restoration from irregular and noisy evidence
Abstract Slides Poster Similar
Detecting Marine Species in Echograms Via Traditional, Hybrid, and Deep Learning Frameworks
Porto Marques Tunai, Alireza Rezvanifar, Melissa Cote, Alexandra Branzan Albu, Kaan Ersahin, Todd Mudge, Stephane Gauthier
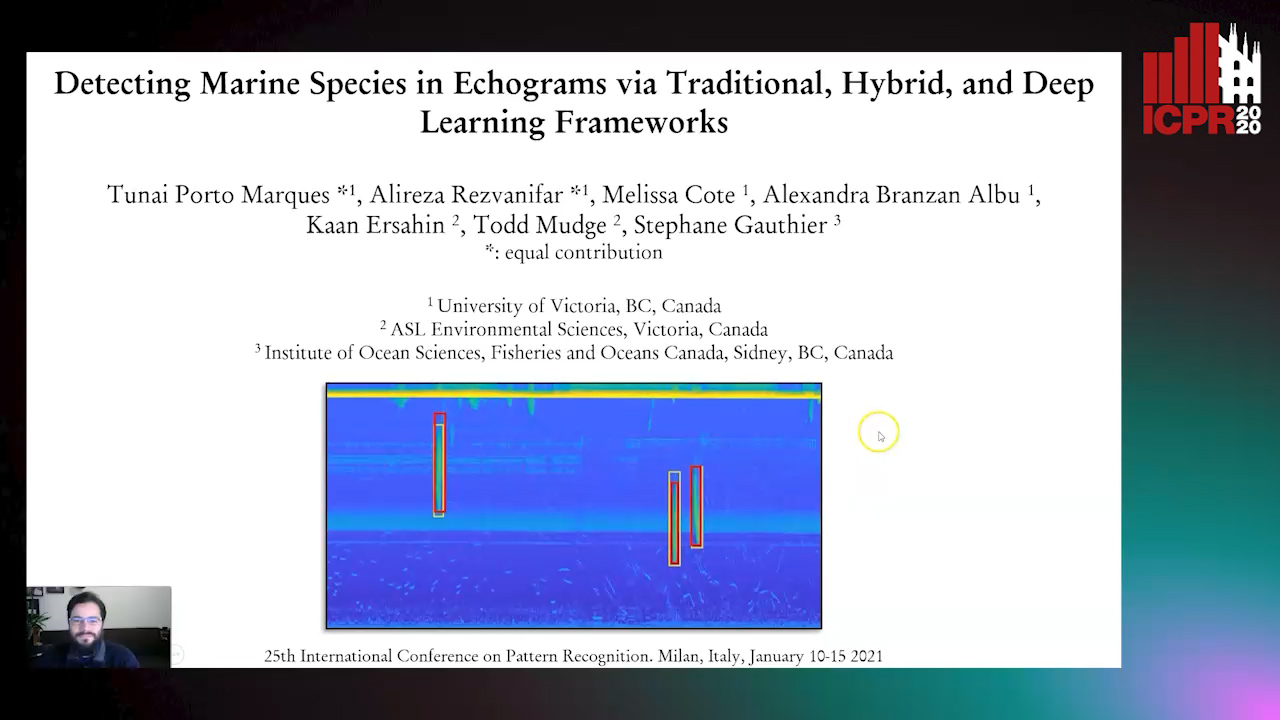
Auto-TLDR; End-to-End Deep Learning for Echogram Interpretation of Marine Species in Echograms
Abstract Slides Poster Similar
On Morphological Hierarchies for Image Sequences
Caglayan Tuna, Alain Giros, François Merciol, Sébastien Lefèvre
Auto-TLDR; Comparison of Hierarchies for Image Sequences
Abstract Slides Poster Similar
Vesselness Filters: A Survey with Benchmarks Applied to Liver Imaging
Jonas Lamy, Odyssée Merveille, Bertrand Kerautret, Nicolas Passat, Antoine Vacavant
Auto-TLDR; Comparison of Vessel Enhancement Filters for Liver Vascular Network Segmentation
Abstract Slides Poster Similar
Story Comparison for Estimating Field of View Overlap in a Video Collection
Thierry Malon, Sylvie Chambon, Alain Crouzil, Vincent Charvillat
Auto-TLDR; Finding Videos with Overlapping Fields of View Using Video Data
Multi-View Object Detection Using Epipolar Constraints within Cluttered X-Ray Security Imagery
Brian Kostadinov Shalon Isaac-Medina, Chris G. Willcocks, Toby Breckon

Auto-TLDR; Exploiting Epipolar Constraints for Multi-View Object Detection in X-ray Security Images
Abstract Slides Poster Similar
Active Sampling for Pairwise Comparisons via Approximate Message Passing and Information Gain Maximization
Aliaksei Mikhailiuk, Clifford Wilmot, Maria Perez-Ortiz, Dingcheng Yue, Rafal Mantiuk
Auto-TLDR; ASAP: An Active Sampling Algorithm for Pairwise Comparison Data
A New Geodesic-Based Feature for Characterization of 3D Shapes: Application to Soft Tissue Organ Temporal Deformations
Karim Makki, Amine Bohi, Augustin Ogier, Marc-Emmanuel Bellemare
Auto-TLDR; Spatio-Temporal Feature Descriptors for 3D Shape Characterization from Point Clouds
Abstract Slides Poster Similar
How to Define a Rejection Class Based on Model Learning?
Sarah Laroui, Xavier Descombes, Aurelia Vernay, Florent Villiers, Francois Villalba, Eric Debreuve
Auto-TLDR; An innovative learning strategy for supervised classification that is able, by design, to reject a sample as not belonging to any of the known classes
Abstract Slides Poster Similar
Automated Whiteboard Lecture Video Summarization by Content Region Detection and Representation
Bhargava Urala Kota, Alexander Stone, Kenny Davila, Srirangaraj Setlur, Venu Govindaraju
Auto-TLDR; A Framework for Summarizing Whiteboard Lecture Videos Using Feature Representations of Handwritten Content Regions
Learning Defects in Old Movies from Manually Assisted Restoration
Arthur Renaudeau, Travis Seng, Axel Carlier, Jean-Denis Durou, Fabien Pierre, Francois Lauze, Jean-François Aujol
Auto-TLDR; U-Net: Detecting Defects in Old Movies by Inpainting Techniques
Abstract Slides Poster Similar
Learning Embeddings for Image Clustering: An Empirical Study of Triplet Loss Approaches
Kalun Ho, Janis Keuper, Franz-Josef Pfreundt, Margret Keuper
Auto-TLDR; Clustering Objectives for K-means and Correlation Clustering Using Triplet Loss
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
Learning Neural Textual Representations for Citation Recommendation
Thanh Binh Kieu, Inigo Jauregi Unanue, Son Bao Pham, Xuan-Hieu Phan, M. Piccardi
Auto-TLDR; Sentence-BERT cascaded with Siamese and triplet networks for citation recommendation
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
Segmentation of Axillary and Supraclavicular Tumoral Lymph Nodes in PET/CT: A Hybrid CNN/Component-Tree Approach
Diana Lucia Farfan Cabrera, Nicolas Gogin, David Morland, Benoît Naegel, Dimitri Papathanassiou, Nicolas Passat
Auto-TLDR; Coupling Convolutional Neural Networks and Component-Trees for Lymph node Segmentation from PET/CT Images
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Gabrielle Flood, David Gillsjö, Patrik Persson, Anders Heyden, Kalle Åström

Auto-TLDR; A Low-Memory Footprint Representation for Robust Map Merge
Abstract Slides Poster Similar
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
Automatic Classification of Human Granulosa Cells in Assisted Reproductive Technology Using Vibrational Spectroscopy Imaging
Marina Paolanti, Emanuele Frontoni, Giorgia Gioacchini, Giorgini Elisabetta, Notarstefano Valentina, Zacà Carlotta, Carnevali Oliana, Andrea Borini, Marco Mameli

Auto-TLDR; Predicting Oocyte Quality in Assisted Reproductive Technology Using Machine Learning Techniques
Abstract Slides Poster Similar
Learning to Segment Clustered Amoeboid Cells from Brightfield Microscopy Via Multi-Task Learning with Adaptive Weight Selection
Rituparna Sarkar, Suvadip Mukherjee, Elisabeth Labruyere, Jean-Christophe Olivo-Marin
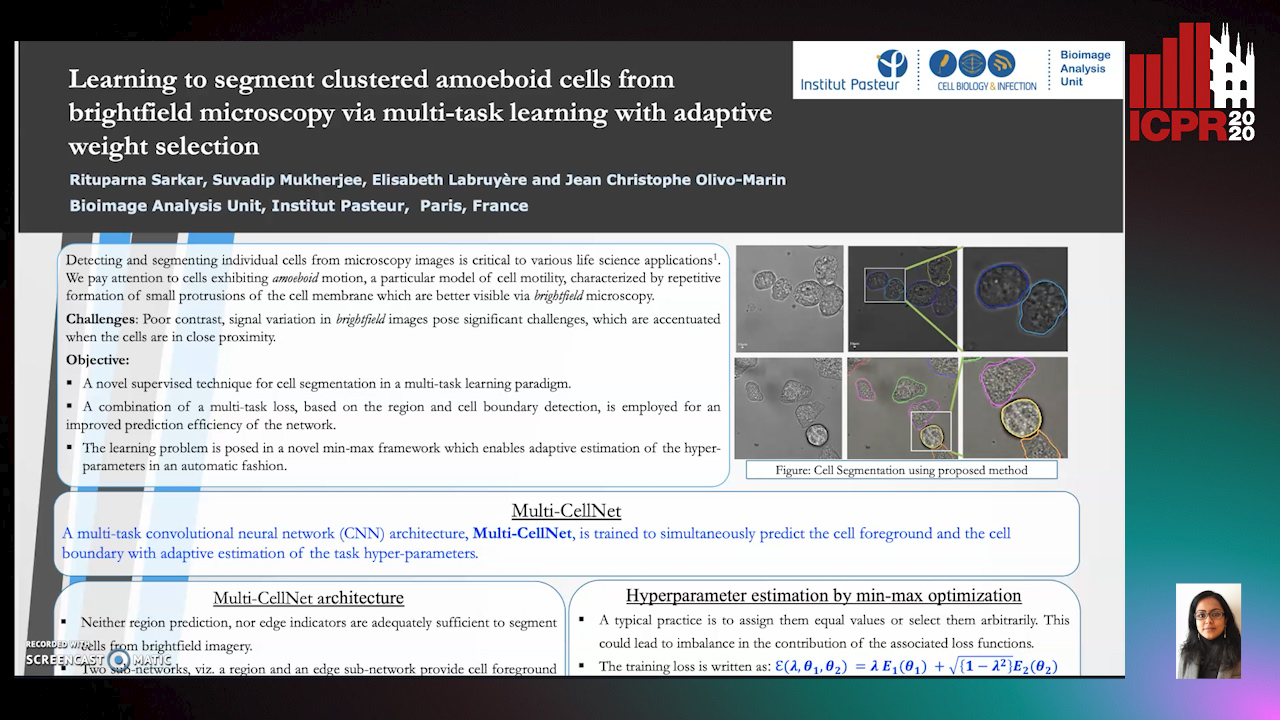
Auto-TLDR; Supervised Cell Segmentation from Microscopy Images using Multi-task Learning in a Multi-Task Learning Paradigm
Multi-Camera Sports Players 3D Localization with Identification Reasoning
Yukun Yang, Ruiheng Zhang, Wanneng Wu, Yu Peng, Xu Min

Auto-TLDR; Probabilistic and Identified Occupancy Map for Sports Players 3D Localization
Abstract Slides Poster Similar
Multi-Scale Keypoint Matching
Auto-TLDR; Multi-Scale Keypoint Matching Using Multi-Scale Information
Abstract Slides Poster Similar
Expectation-Maximization for Scheduling Problems in Satellite Communication
Werner Bailer, Martin Winter, Johannes Ebert, Joel Flavio, Karin Plimon
Auto-TLDR; Unsupervised Machine Learning for Satellite Communication Using Expectation-Maximization
Abstract Slides Poster Similar
Quantization in Relative Gradient Angle Domain for Building Polygon Estimation
Yuhao Chen, Yifan Wu, Linlin Xu, Alexander Wong
Auto-TLDR; Relative Gradient Angle Transform for Building Footprint Extraction from Remote Sensing Data
Abstract Slides Poster Similar
EM-Net: Deep Learning for Electron Microscopy Image Segmentation
Afshin Khadangi, Thomas Boudier, Vijay Rajagopal

Auto-TLDR; EM-net: Deep Convolutional Neural Network for Electron Microscopy Image Segmentation
PIF: Anomaly detection via preference embedding
Filippo Leveni, Luca Magri, Giacomo Boracchi, Cesare Alippi
Auto-TLDR; PIF: Anomaly Detection with Preference Embedding for Structured Patterns
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Robust Image Coding on Synthetic DNA: Reducing Sequencing Noise with Inpainting
Eva Gil San Antonio, Mattia Piretti, Melpomeni Dimopoulou, Marc Antonini
Auto-TLDR; Noise Resilience for DNA Storage
Abstract Slides Poster Similar
An Integrated Approach of Deep Learning and Symbolic Analysis for Digital PDF Table Extraction
Mengshi Zhang, Daniel Perelman, Vu Le, Sumit Gulwani
Auto-TLDR; Deep Learning and Symbolic Reasoning for Unstructured PDF Table Extraction
Abstract Slides Poster Similar
Weakly Supervised Geodesic Segmentation of Egyptian Mummy CT Scans
Avik Hati, Matteo Bustreo, Diego Sona, Vittorio Murino, Alessio Del Bue

Auto-TLDR; A Weakly Supervised and Efficient Interactive Segmentation of Ancient Egyptian Mummies CT Scans Using Geodesic Distance Measure and GrabCut
Abstract Slides Poster Similar
Human Embryo Cell Centroid Localization and Counting in Time-Lapse Sequences
Lisette Lockhart, Parvaneh Saeedi, Jason Au, Jon Havelock
Auto-TLDR; Automated Time-Lapse Estimation of Embryo Cell Stage in Time-lapse Sequences
Abstract Slides Poster Similar
A Plane-Based Approach for Indoor Point Clouds Registration
Ketty Favre, Muriel Pressigout, Luce Morin, Eric Marchand

Auto-TLDR; A plane-based registration approach for indoor environments based on LiDAR data
Abstract Slides Poster Similar
Anime Sketch Colorization by Component-Based Matching Using Deep Appearance Features and Graph Representation
Thien Do, Pham Van, Anh Nguyen, Trung Dang, Quoc Nguyen, Bach Hoang, Giao Nguyen
Auto-TLDR; Combining Deep Learning and Graph Representation for Sketch Colorization
Abstract Slides Poster Similar
Classification of Intestinal Gland Cell-Graphs Using Graph Neural Networks
Linda Studer, Jannis Wallau, Heather Dawson, Inti Zlobec, Andreas Fischer
Auto-TLDR; Graph Neural Networks for Classification of Dysplastic Gland Glands using Graph Neural Networks
Abstract Slides Poster Similar
Video Anomaly Detection by Estimating Likelihood of Representations
Auto-TLDR; Video Anomaly Detection in the latent feature space using a deep probabilistic model
Abstract Slides Poster Similar
Unconstrained Vision Guided UAV Based Safe Helicopter Landing
Arindam Sikdar, Abhimanyu Sahu, Debajit Sen, Rohit Mahajan, Ananda Chowdhury

Auto-TLDR; Autonomous Helicopter Landing in Hazardous Environments from Unmanned Aerial Images Using Constrained Graph Clustering
Abstract Slides Poster Similar
Assortative-Constrained Stochastic Block Models
Daniel Gribel, Thibaut Vidal, Michel Gendreau
Auto-TLDR; Constrained Stochastic Block Models for Assortative Communities in Neural Networks
Abstract Slides Poster Similar
Countering Anti-Forensics of SIFT-Based Copy-Move Detection
Auto-TLDR; Countering SIFT Keypoint Removal for Image Forgery Detection by Changing to a Different Type of Keypoints
Abstract Slides Poster Similar
Sketch-Based Community Detection Via Representative Node Sampling
Mahlagha Sedghi, Andre Beckus, George Atia
Auto-TLDR; Sketch-based Clustering of Community Detection Using a Small Sketch
Abstract Slides Poster Similar
Tensor Factorization of Brain Structural Graph for Unsupervised Classification in Multiple Sclerosis
Berardino Barile, Marzullo Aldo, Claudio Stamile, Françoise Durand-Dubief, Dominique Sappey-Marinier
Auto-TLDR; A Fully Automated Tensor-based Algorithm for Multiple Sclerosis Classification based on Structural Connectivity Graph of the White Matter Network
Abstract Slides Poster Similar
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar