Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Similar papers
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Towards life-long mapping of dynamic environments using temporal persistence modeling
Georgios Tsamis, Ioannis Kostavelis, Dimitrios Giakoumis, Dimitrios Tzovaras
Auto-TLDR; Lifelong Mapping for Mobile Robot Navigation in Dynamic Environments
Abstract Slides Poster Similar
Object-Oriented Map Exploration and Construction Based on Auxiliary Task Aided DRL
Junzhe Xu, Jianhua Zhang, Shengyong Chen, Honghai Liu

Auto-TLDR; Auxiliary Task Aided Deep Reinforcement Learning for Environment Exploration by Autonomous Robots
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
AV-SLAM: Autonomous Vehicle SLAM with Gravity Direction Initialization
Kaan Yilmaz, Baris Suslu, Sohini Roychowdhury, L. Srikar Muppirisetty

Auto-TLDR; VI-SLAM with AGI: A combination of three SLAM algorithms for autonomous vehicles
Abstract Slides Poster Similar
DAG-Net: Double Attentive Graph Neural Network for Trajectory Forecasting
Alessio Monti, Alessia Bertugli, Simone Calderara, Rita Cucchiara
Auto-TLDR; Recurrent Generative Model for Multi-modal Human Motion Behaviour in Urban Environments
Abstract Slides Poster Similar
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
Trajectory-User Link with Attention Recurrent Networks
Tao Sun, Yongjun Xu, Fei Wang, Lin Wu, 塘文 钱, Zezhi Shao
Auto-TLDR; TULAR: Trajectory-User Link with Attention Recurrent Neural Networks
Abstract Slides Poster Similar
Visual Localization for Autonomous Driving: Mapping the Accurate Location in the City Maze
Dongfang Liu, Yiming Cui, Xiaolei Guo, Wei Ding, Baijian Yang, Yingjie Chen

Auto-TLDR; Feature Voting for Robust Visual Localization in Urban Settings
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Deep Next-Best-View Planner for Cross-Season Visual Route Classification
Auto-TLDR; Active Visual Place Recognition using Deep Convolutional Neural Network
Abstract Slides Poster Similar
Real-Time End-To-End Lane ID Estimation Using Recurrent Networks
Ibrahim Halfaoui, Fahd Bouzaraa, Onay Urfalioglu

Auto-TLDR; Real-Time, Vision-Only Lane Identification Using Monocular Camera
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Transformer Networks for Trajectory Forecasting
Francesco Giuliari, Hasan Irtiza, Marco Cristani, Fabio Galasso
Auto-TLDR; TransformerNetworks for Trajectory Prediction of People Interactions
Abstract Slides Poster Similar
Localization of Unmanned Aerial Vehicles in Corridor Environments Using Deep Learning
Ram Padhy, Shahzad Ahmad, Sachin Verma, Sambit Bakshi, Pankaj Kumar Sa
Auto-TLDR; A monocular vision assisted localization algorithm for indoor corridor environments
Abstract Slides Poster Similar
Loop-closure detection by LiDAR scan re-identification
Jukka Peltomäki, Xingyang Ni, Jussi Puura, Joni-Kristian Kamarainen, Heikki Juhani Huttunen

Auto-TLDR; Loop-Closing Detection from LiDAR Scans Using Convolutional Neural Networks
Abstract Slides Poster Similar
Road Network Metric Learning for Estimated Time of Arrival
Yiwen Sun, Kun Fu, Zheng Wang, Changshui Zhang, Jieping Ye
Auto-TLDR; Road Network Metric Learning for Estimated Time of Arrival (RNML-ETA)
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Gabrielle Flood, David Gillsjö, Patrik Persson, Anders Heyden, Kalle Åström

Auto-TLDR; A Low-Memory Footprint Representation for Robust Map Merge
Abstract Slides Poster Similar
Unconstrained Vision Guided UAV Based Safe Helicopter Landing
Arindam Sikdar, Abhimanyu Sahu, Debajit Sen, Rohit Mahajan, Ananda Chowdhury

Auto-TLDR; Autonomous Helicopter Landing in Hazardous Environments from Unmanned Aerial Images Using Constrained Graph Clustering
Abstract Slides Poster Similar
On Embodied Visual Navigation in Real Environments through Habitat
Marco Rosano, Antonino Furnari, Luigi Gulino, Giovanni Maria Farinella

Auto-TLDR; Learning Navigation Policies on Real World Observations using Real World Images and Sensor and Actuation Noise
Abstract Slides Poster Similar
Trajectory Representation Learning for Multi-Task NMRDP Planning
Firas Jarboui, Vianney Perchet
Auto-TLDR; Exploring Non Markovian Reward Decision Processes for Reinforcement Learning
Abstract Slides Poster Similar
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
AG-GAN: An Attentive Group-Aware GAN for Pedestrian Trajectory Prediction
Yue Song, Niccolò Bisagno, Syed Zohaib Hassan, Nicola Conci
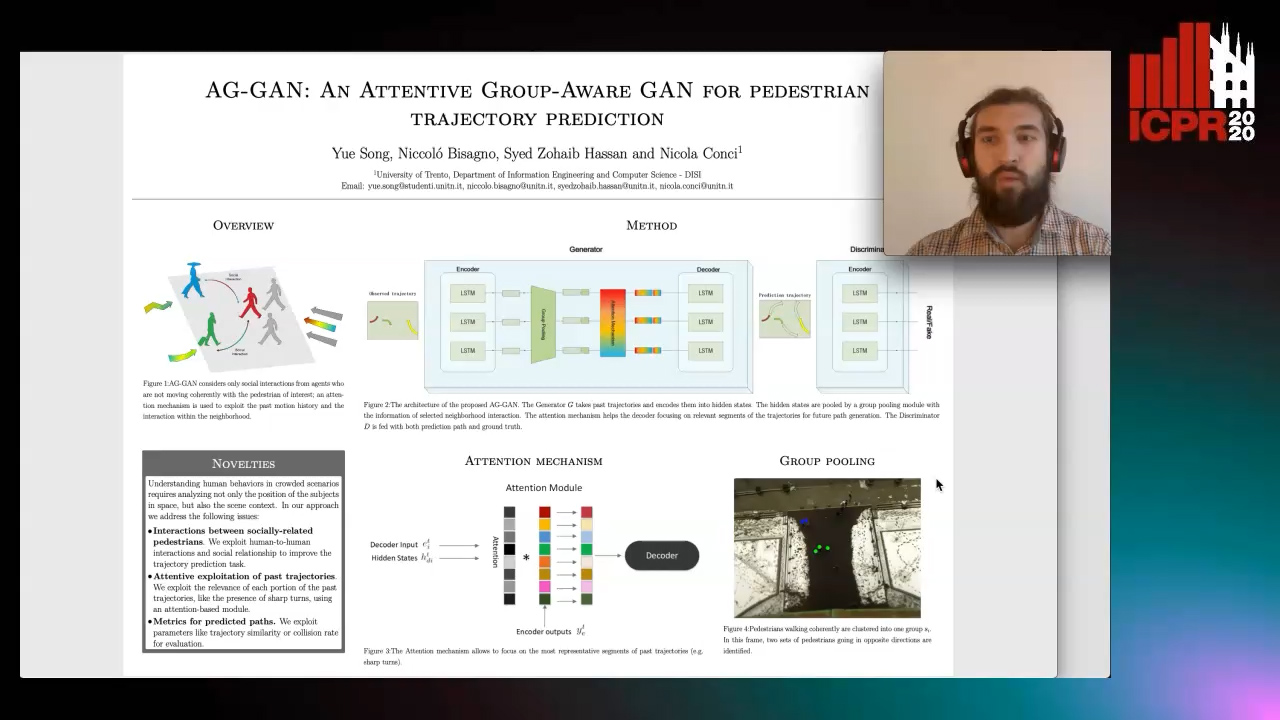
Auto-TLDR; An attentive group-aware GAN for motion prediction in crowded scenarios
Abstract Slides Poster Similar
Low Dimensional State Representation Learning with Reward-Shaped Priors
Nicolò Botteghi, Ruben Obbink, Daan Geijs, Mannes Poel, Beril Sirmacek, Christoph Brune, Abeje Mersha, Stefano Stramigioli

Auto-TLDR; Unsupervised Learning for Unsupervised Reinforcement Learning in Robotics
What and How? Jointly Forecasting Human Action and Pose
Yanjun Zhu, Yanxia Zhang, Qiong Liu, Andreas Girgensohn

Auto-TLDR; Forecasting Human Actions and Motion Trajectories with Joint Action Classification and Pose Regression
Abstract Slides Poster Similar
Image Sequence Based Cyclist Action Recognition Using Multi-Stream 3D Convolution
Stefan Zernetsch, Steven Schreck, Viktor Kress, Konrad Doll, Bernhard Sick

Auto-TLDR; 3D-ConvNet: A Multi-stream 3D Convolutional Neural Network for Detecting Cyclists in Real World Traffic Situations
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Learning to Segment Dynamic Objects Using SLAM Outliers
Dupont Romain, Mohamed Tamaazousti, Hervé Le Borgne

Auto-TLDR; Automatic Segmentation of Dynamic Objects Using SLAM Outliers Using Consensus Inversion
Abstract Slides Poster Similar
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control
Zahra Gharaee, Karl Holmquist, Linbo He, Michael Felsberg

Auto-TLDR; Bayesian Reinforcement Learning for Autonomous Driving
Abstract Slides Poster Similar
Total Estimation from RGB Video: On-Line Camera Self-Calibration, Non-Rigid Shape and Motion

Auto-TLDR; Joint Auto-Calibration, Pose and 3D Reconstruction of a Non-rigid Object from an uncalibrated RGB Image Sequence
Abstract Slides Poster Similar
Force Banner for the Recognition of Spatial Relations
Robin Deléarde, Camille Kurtz, Laurent Wendling, Philippe Dejean
Auto-TLDR; Spatial Relation Recognition using Force Banners
Switching Dynamical Systems with Deep Neural Networks
Cesar Ali Ojeda Marin, Kostadin Cvejoski, Bogdan Georgiev, Ramses J. Sanchez
Auto-TLDR; Variational RNN for Switching Dynamics
Abstract Slides Poster Similar
Calibration and Absolute Pose Estimation of Trinocular Linear Camera Array for Smart City Applications
Martin Ahrnbom, Mikael Nilsson, Håkan Ardö, Kalle Åström, Oksana Yastremska-Kravchenko, Aliaksei Laureshyn

Auto-TLDR; Trinocular Linear Camera Array Calibration for Traffic Surveillance Applications
Abstract Slides Poster Similar
Learning to Take Directions One Step at a Time
Qiyang Hu, Adrian Wälchli, Tiziano Portenier, Matthias Zwicker, Paolo Favaro
Auto-TLDR; Generating a Sequence of Motion Strokes from a Single Image
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Motion Segmentation with Pairwise Matches and Unknown Number of Motions
Federica Arrigoni, Tomas Pajdla, Luca Magri

Auto-TLDR; Motion Segmentation using Multi-Modelfitting andpermutation synchronization
Abstract Slides Poster Similar
Visual Prediction of Driver Behavior in Shared Road Areas
Peter Gawronski, Darius Burschka
Auto-TLDR; Predicting Vehicle Behavior in Shared Road Segment Intersections Using Topological Knowledge
Abstract Slides Poster Similar
Temporal Pulses Driven Spiking Neural Network for Time and Power Efficient Object Recognition in Autonomous Driving
Wei Wang, Shibo Zhou, Jingxi Li, Xiaohua Li, Junsong Yuan, Zhanpeng Jin

Auto-TLDR; Spiking Neural Network for Real-Time Object Recognition on Temporal LiDAR Pulses
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
Edge-Aware Graph Attention Network for Ratio of Edge-User Estimation in Mobile Networks
Jiehui Deng, Sheng Wan, Xiang Wang, Enmei Tu, Xiaolin Huang, Jie Yang, Chen Gong
Auto-TLDR; EAGAT: Edge-Aware Graph Attention Network for Automatic REU Estimation in Mobile Networks
Abstract Slides Poster Similar
Derivation of Geometrically and Semantically Annotated UAV Datasets at Large Scales from 3D City Models
Sidi Wu, Lukas Liebel, Marco Körner

Auto-TLDR; Large-Scale Dataset of Synthetic UAV Imagery for Geometric and Semantic Annotation
Abstract Slides Poster Similar
Constructing Geographic and Long-term Temporal Graph for Traffic Forecasting
Yiwen Sun, Yulu Wang, Kun Fu, Zheng Wang, Changshui Zhang, Jieping Ye
Auto-TLDR; GLT-GCRNN: Geographic and Long-term Temporal Graph Convolutional Recurrent Neural Network for Traffic Forecasting
Abstract Slides Poster Similar
TreeRNN: Topology-Preserving Deep Graph Embedding and Learning
Yecheng Lyu, Ming Li, Xinming Huang, Ulkuhan Guler, Patrick Schaumont, Ziming Zhang
Auto-TLDR; TreeRNN: Recurrent Neural Network for General Graph Classification
Abstract Slides Poster Similar
Street-Map Based Validation of Semantic Segmentation in Autonomous Driving
Laura Von Rueden, Tim Wirtz, Fabian Hueger, Jan David Schneider, Nico Piatkowski, Christian Bauckhage

Auto-TLDR; Semantic Segmentation Mask Validation Using A-priori Knowledge from Street Maps
Abstract Slides Poster Similar