DAG-Net: Double Attentive Graph Neural Network for Trajectory Forecasting
Alessio Monti,
Alessia Bertugli,
Simone Calderara,
Rita Cucchiara
Auto-TLDR; Recurrent Generative Model for Multi-modal Human Motion Behaviour in Urban Environments
Similar papers
AG-GAN: An Attentive Group-Aware GAN for Pedestrian Trajectory Prediction
Yue Song, Niccolò Bisagno, Syed Zohaib Hassan, Nicola Conci
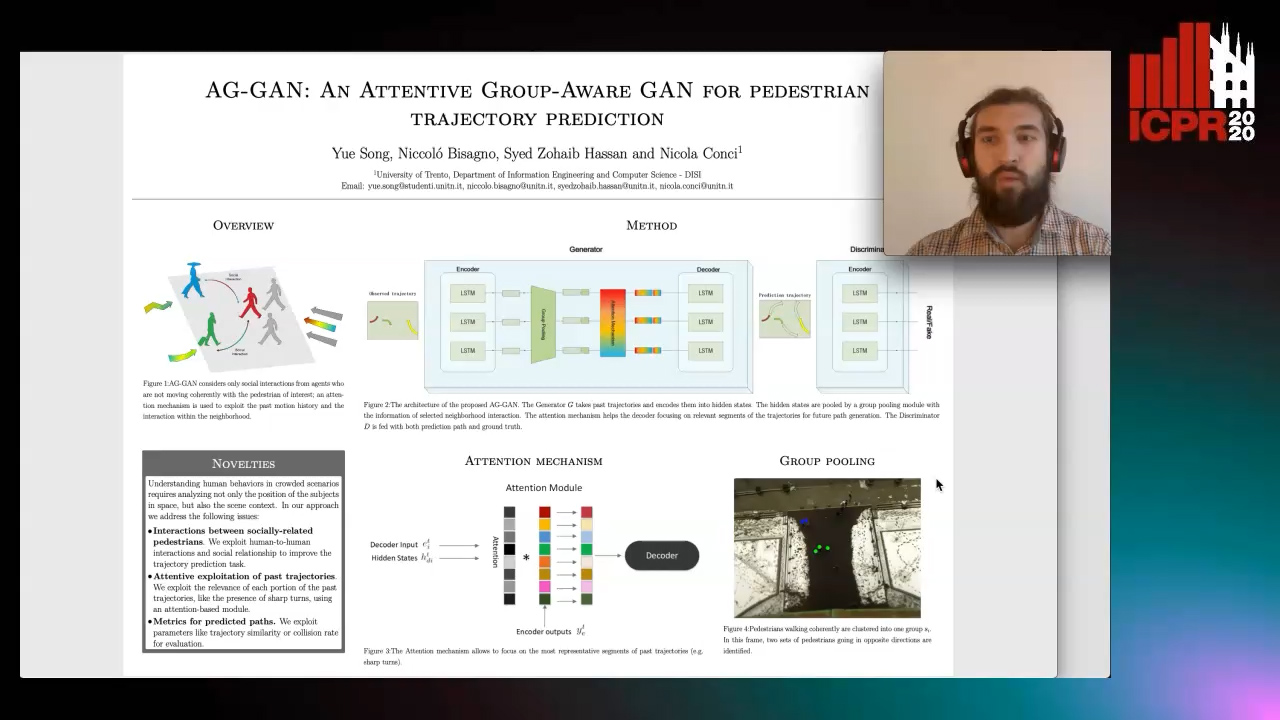
Auto-TLDR; An attentive group-aware GAN for motion prediction in crowded scenarios
Abstract Slides Poster Similar
Transformer Networks for Trajectory Forecasting
Francesco Giuliari, Hasan Irtiza, Marco Cristani, Fabio Galasso
Auto-TLDR; TransformerNetworks for Trajectory Prediction of People Interactions
Abstract Slides Poster Similar
Switching Dynamical Systems with Deep Neural Networks
Cesar Ali Ojeda Marin, Kostadin Cvejoski, Bogdan Georgiev, Ramses J. Sanchez
Auto-TLDR; Variational RNN for Switching Dynamics
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Explore and Explain: Self-Supervised Navigation and Recounting
Roberto Bigazzi, Federico Landi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara
Auto-TLDR; Exploring a Photorealistic Environment for Explanation and Navigation
Trajectory-User Link with Attention Recurrent Networks
Tao Sun, Yongjun Xu, Fei Wang, Lin Wu, 塘文 钱, Zezhi Shao
Auto-TLDR; TULAR: Trajectory-User Link with Attention Recurrent Neural Networks
Abstract Slides Poster Similar
What and How? Jointly Forecasting Human Action and Pose
Yanjun Zhu, Yanxia Zhang, Qiong Liu, Andreas Girgensohn

Auto-TLDR; Forecasting Human Actions and Motion Trajectories with Joint Action Classification and Pose Regression
Abstract Slides Poster Similar
Mutual Information Based Method for Unsupervised Disentanglement of Video Representation
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; MIPAE: Mutual Information Predictive Auto-Encoder for Video Prediction
Abstract Slides Poster Similar
Reducing the Variance of Variational Estimates of Mutual Information by Limiting the Critic's Hypothesis Space to RKHS
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; Mutual Information Estimation from Variational Lower Bounds Using a Critic's Hypothesis Space
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
Learning to Take Directions One Step at a Time
Qiyang Hu, Adrian Wälchli, Tiziano Portenier, Matthias Zwicker, Paolo Favaro
Auto-TLDR; Generating a Sequence of Motion Strokes from a Single Image
Abstract Slides Poster Similar
Image Sequence Based Cyclist Action Recognition Using Multi-Stream 3D Convolution
Stefan Zernetsch, Steven Schreck, Viktor Kress, Konrad Doll, Bernhard Sick

Auto-TLDR; 3D-ConvNet: A Multi-stream 3D Convolutional Neural Network for Detecting Cyclists in Real World Traffic Situations
Abstract Slides Poster Similar
PoseCVAE: Anomalous Human Activity Detection
Yashswi Jain, Ashvini Kumar Sharma, Rajbabu Velmurugan, Biplab Banerjee
Auto-TLDR; PoseCVAE: Anomalous Human Activity Detection Using Generative Modeling
Abstract Slides Poster Similar
Hierarchical Multimodal Attention for Deep Video Summarization
Melissa Sanabria, Frederic Precioso, Thomas Menguy
Auto-TLDR; Automatic Summarization of Professional Soccer Matches Using Event-Stream Data and Multi- Instance Learning
Abstract Slides Poster Similar
Temporal Collaborative Filtering with Graph Convolutional Neural Networks
Esther Rodrigo-Bonet, Minh Duc Nguyen, Nikos Deligiannis
Auto-TLDR; Temporal Collaborative Filtering with Graph-Neural-Network-based Neural Networks
Abstract Slides Poster Similar
Trajectory Representation Learning for Multi-Task NMRDP Planning
Firas Jarboui, Vianney Perchet
Auto-TLDR; Exploring Non Markovian Reward Decision Processes for Reinforcement Learning
Abstract Slides Poster Similar
Constructing Geographic and Long-term Temporal Graph for Traffic Forecasting
Yiwen Sun, Yulu Wang, Kun Fu, Zheng Wang, Changshui Zhang, Jieping Ye
Auto-TLDR; GLT-GCRNN: Geographic and Long-term Temporal Graph Convolutional Recurrent Neural Network for Traffic Forecasting
Abstract Slides Poster Similar
Learning from Learners: Adapting Reinforcement Learning Agents to Be Competitive in a Card Game
Pablo Vinicius Alves De Barros, Ana Tanevska, Alessandra Sciutti
Auto-TLDR; Adaptive Reinforcement Learning for Competitive Card Games
Abstract Slides Poster Similar
Global Feature Aggregation for Accident Anticipation
Mishal Fatima, Umar Karim Khan, Chong Min Kyung
Auto-TLDR; Feature Aggregation for Predicting Accidents in Video Sequences
Interpolation in Auto Encoders with Bridge Processes
Carl Ringqvist, Henrik Hult, Judith Butepage, Hedvig Kjellstrom
Auto-TLDR; Stochastic interpolations from auto encoders trained on flattened sequences
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Knowledge Distillation for Action Anticipation Via Label Smoothing
Guglielmo Camporese, Pasquale Coscia, Antonino Furnari, Giovanni Maria Farinella, Lamberto Ballan
Auto-TLDR; A Multi-Modal Framework for Action Anticipation using Long Short-Term Memory Networks
Abstract Slides Poster Similar
CardioGAN: An Attention-Based Generative Adversarial Network for Generation of Electrocardiograms
Subhrajyoti Dasgupta, Sudip Das, Ujjwal Bhattacharya
Auto-TLDR; CardioGAN: Generative Adversarial Network for Synthetic Electrocardiogram Signals
Abstract Slides Poster Similar
Recurrent Deep Attention Network for Person Re-Identification
Changhao Wang, Jun Zhou, Xianfei Duan, Guanwen Zhang, Wei Zhou
Auto-TLDR; Recurrent Deep Attention Network for Person Re-identification
Abstract Slides Poster Similar
Self-Supervised Joint Encoding of Motion and Appearance for First Person Action Recognition
Mirco Planamente, Andrea Bottino, Barbara Caputo

Auto-TLDR; A Single Stream Architecture for Egocentric Action Recognition from the First-Person Point of View
Abstract Slides Poster Similar
A Two-Stream Recurrent Network for Skeleton-Based Human Interaction Recognition
Qianhui Men, Edmond S. L. Ho, Shum Hubert P. H., Howard Leung
Auto-TLDR; Two-Stream Recurrent Neural Network for Human-Human Interaction Recognition
Abstract Slides Poster Similar
A Grid-Based Representation for Human Action Recognition
Soufiane Lamghari, Guillaume-Alexandre Bilodeau, Nicolas Saunier

Auto-TLDR; GRAR: Grid-based Representation for Action Recognition in Videos
Abstract Slides Poster Similar
Towards Practical Compressed Video Action Recognition: A Temporal Enhanced Multi-Stream Network
Bing Li, Longteng Kong, Dongming Zhang, Xiuguo Bao, Di Huang, Yunhong Wang
Auto-TLDR; TEMSN: Temporal Enhanced Multi-Stream Network for Compressed Video Action Recognition
Abstract Slides Poster Similar
End-To-End Multi-Task Learning of Missing Value Imputation and Forecasting in Time-Series Data
Jinhee Kim, Taesung Kim, Jang-Ho Choi, Jaegul Choo
Auto-TLDR; Time-Series Prediction with Denoising and Imputation of Missing Data
Abstract Slides Poster Similar
On Embodied Visual Navigation in Real Environments through Habitat
Marco Rosano, Antonino Furnari, Luigi Gulino, Giovanni Maria Farinella

Auto-TLDR; Learning Navigation Policies on Real World Observations using Real World Images and Sensor and Actuation Noise
Abstract Slides Poster Similar
AVD-Net: Attention Value Decomposition Network for Deep Multi-Agent Reinforcement Learning
Zhang Yuanxin, Huimin Ma, Yu Wang
Auto-TLDR; Attention Value Decomposition Network for Cooperative Multi-agent Reinforcement Learning
Abstract Slides Poster Similar
Visual Oriented Encoder: Integrating Multimodal and Multi-Scale Contexts for Video Captioning
Auto-TLDR; Visual Oriented Encoder for Video Captioning
Abstract Slides Poster Similar
A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control
Zahra Gharaee, Karl Holmquist, Linbo He, Michael Felsberg

Auto-TLDR; Bayesian Reinforcement Learning for Autonomous Driving
Abstract Slides Poster Similar
Transfer Learning with Graph Neural Networks for Short-Term Highway Traffic Forecasting
Tanwi Mallick, Prasanna Balaprakash, Eric Rask, Jane Macfarlane
Auto-TLDR; Transfer Learning for Highway Traffic Forecasting on Unseen Traffic Networks
Abstract Slides Poster Similar
The Role of Cycle Consistency for Generating Better Human Action Videos from a Single Frame
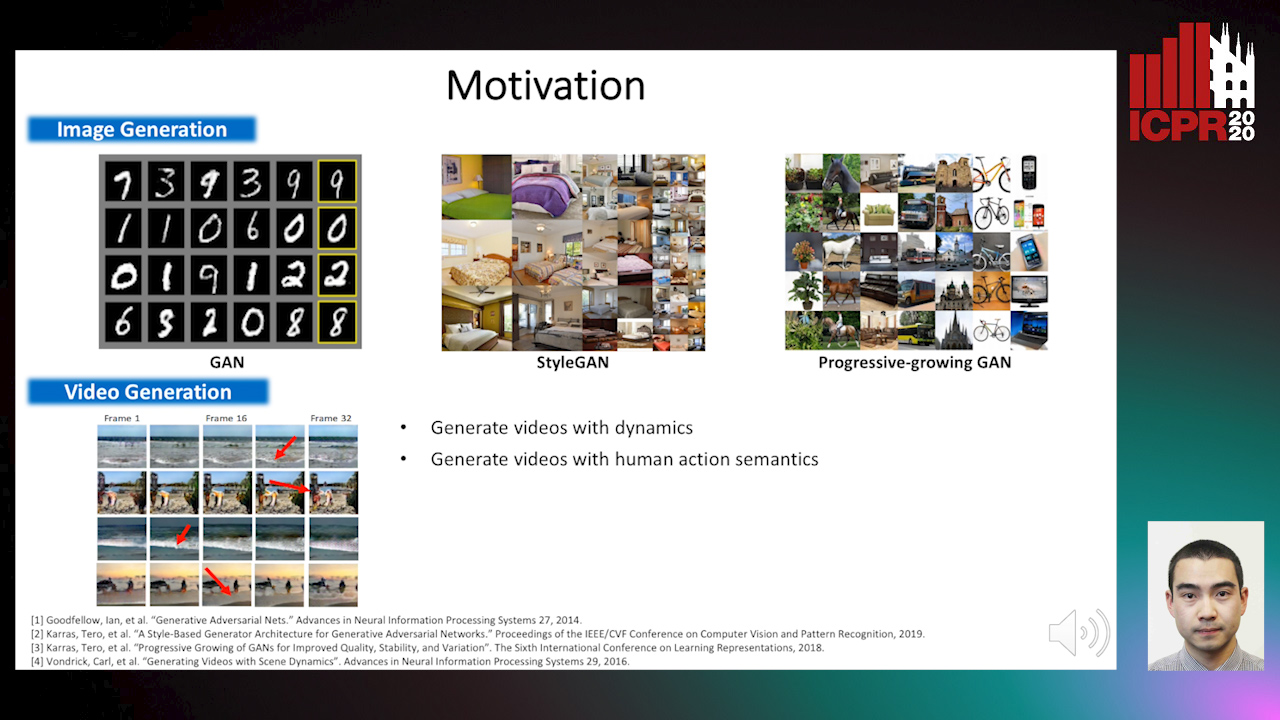
Auto-TLDR; Generating Videos with Human Action Semantics using Cycle Constraints
Abstract Slides Poster Similar
Low Dimensional State Representation Learning with Reward-Shaped Priors
Nicolò Botteghi, Ruben Obbink, Daan Geijs, Mannes Poel, Beril Sirmacek, Christoph Brune, Abeje Mersha, Stefano Stramigioli

Auto-TLDR; Unsupervised Learning for Unsupervised Reinforcement Learning in Robotics
SAILenv: Learning in Virtual Visual Environments Made Simple
Enrico Meloni, Luca Pasqualini, Matteo Tiezzi, Marco Gori, Stefano Melacci

Auto-TLDR; SAILenv: A Simple and Customized Platform for Visual Recognition in Virtual 3D Environment
Abstract Slides Poster Similar
Auto Encoding Explanatory Examples with Stochastic Paths
Cesar Ali Ojeda Marin, Ramses J. Sanchez, Kostadin Cvejoski, Bogdan Georgiev
Auto-TLDR; Semantic Stochastic Path: Explaining a Classifier's Decision Making Process using latent codes
Abstract Slides Poster Similar
Visual Prediction of Driver Behavior in Shared Road Areas
Peter Gawronski, Darius Burschka
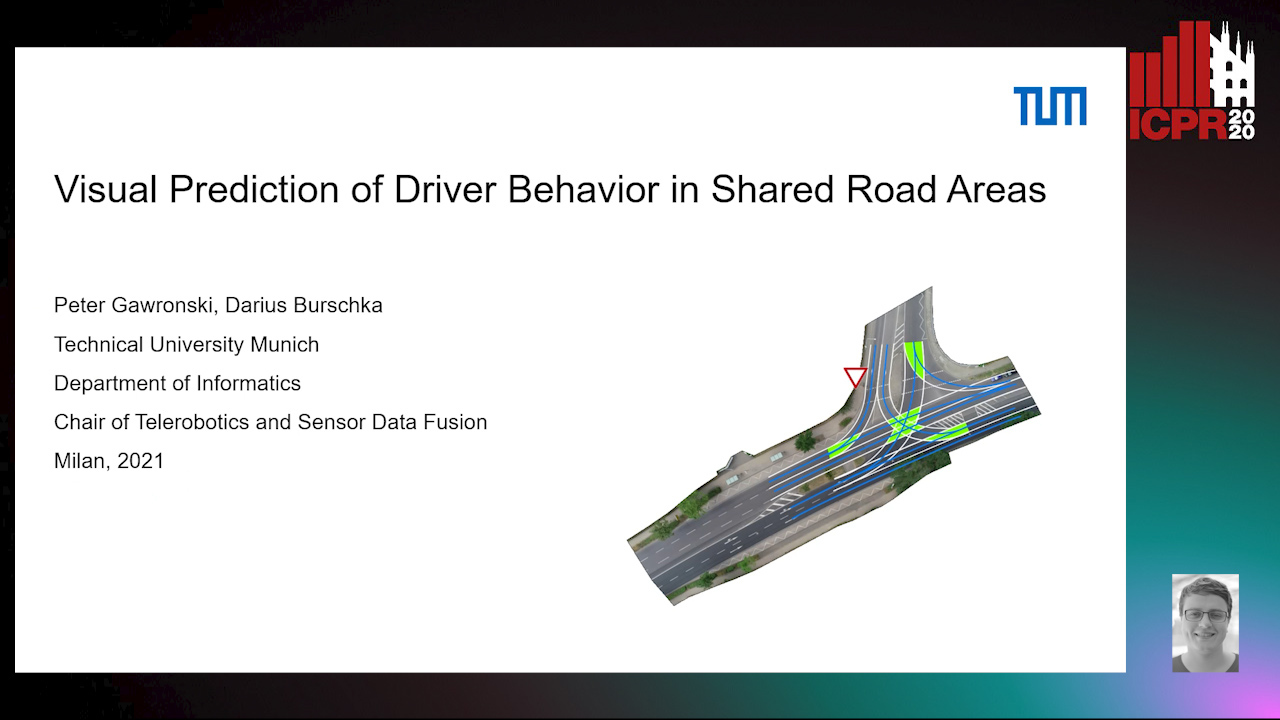
Auto-TLDR; Predicting Vehicle Behavior in Shared Road Segment Intersections Using Topological Knowledge
Abstract Slides Poster Similar
PIN: A Novel Parallel Interactive Network for Spoken Language Understanding
Peilin Zhou, Zhiqi Huang, Fenglin Liu, Yuexian Zou
Auto-TLDR; Parallel Interactive Network for Spoken Language Understanding
Abstract Slides Poster Similar
Deep Reinforcement Learning on a Budget: 3D Control and Reasoning without a Supercomputer
Edward Beeching, Jilles Steeve Dibangoye, Olivier Simonin, Christian Wolf
Auto-TLDR; Deep Reinforcement Learning in Mobile Robots Using 3D Environment Scenarios
Abstract Slides Poster Similar
Context Matters: Self-Attention for Sign Language Recognition
Fares Ben Slimane, Mohamed Bouguessa
Auto-TLDR; Attentional Network for Continuous Sign Language Recognition
Abstract Slides Poster Similar
Epitomic Variational Graph Autoencoder
Rayyan Ahmad Khan, Muhammad Umer Anwaar, Martin Kleinsteuber
Auto-TLDR; EVGAE: A Generative Variational Autoencoder for Graph Data
Abstract Slides Poster Similar
Flow-Guided Spatial Attention Tracking for Egocentric Activity Recognition
Auto-TLDR; flow-guided spatial attention tracking for egocentric activity recognition
Abstract Slides Poster Similar
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
Semantic-Guided Inpainting Network for Complex Urban Scenes Manipulation
Pierfrancesco Ardino, Yahui Liu, Elisa Ricci, Bruno Lepri, Marco De Nadai

Auto-TLDR; Semantic-Guided Inpainting of Complex Urban Scene Using Semantic Segmentation and Generation
Abstract Slides Poster Similar
A Novel Actor Dual-Critic Model for Remote Sensing Image Captioning
Ruchika Chavhan, Biplab Banerjee, Xiao Xiang Zhu, Subhasis Chaudhuri
Auto-TLDR; Actor Dual-Critic Training for Remote Sensing Image Captioning Using Deep Reinforcement Learning
Abstract Slides Poster Similar