Switching Dynamical Systems with Deep Neural Networks
Cesar Ali Ojeda Marin,
Kostadin Cvejoski,
Bogdan Georgiev,
Ramses J. Sanchez
Auto-TLDR; Variational RNN for Switching Dynamics
Similar papers
DAG-Net: Double Attentive Graph Neural Network for Trajectory Forecasting
Alessio Monti, Alessia Bertugli, Simone Calderara, Rita Cucchiara
Auto-TLDR; Recurrent Generative Model for Multi-modal Human Motion Behaviour in Urban Environments
Abstract Slides Poster Similar
Auto Encoding Explanatory Examples with Stochastic Paths
Cesar Ali Ojeda Marin, Ramses J. Sanchez, Kostadin Cvejoski, Bogdan Georgiev
Auto-TLDR; Semantic Stochastic Path: Explaining a Classifier's Decision Making Process using latent codes
Abstract Slides Poster Similar
Interpolation in Auto Encoders with Bridge Processes
Carl Ringqvist, Henrik Hult, Judith Butepage, Hedvig Kjellstrom
Auto-TLDR; Stochastic interpolations from auto encoders trained on flattened sequences
Abstract Slides Poster Similar
Trajectory-User Link with Attention Recurrent Networks
Tao Sun, Yongjun Xu, Fei Wang, Lin Wu, 塘文 钱, Zezhi Shao
Auto-TLDR; TULAR: Trajectory-User Link with Attention Recurrent Neural Networks
Abstract Slides Poster Similar
Hierarchical Routing Mixture of Experts
Wenbo Zhao, Yang Gao, Shahan Ali Memon, Bhiksha Raj, Rita Singh
Auto-TLDR; A Binary Tree-structured Hierarchical Routing Mixture of Experts for Regression
Abstract Slides Poster Similar
AG-GAN: An Attentive Group-Aware GAN for Pedestrian Trajectory Prediction
Yue Song, Niccolò Bisagno, Syed Zohaib Hassan, Nicola Conci
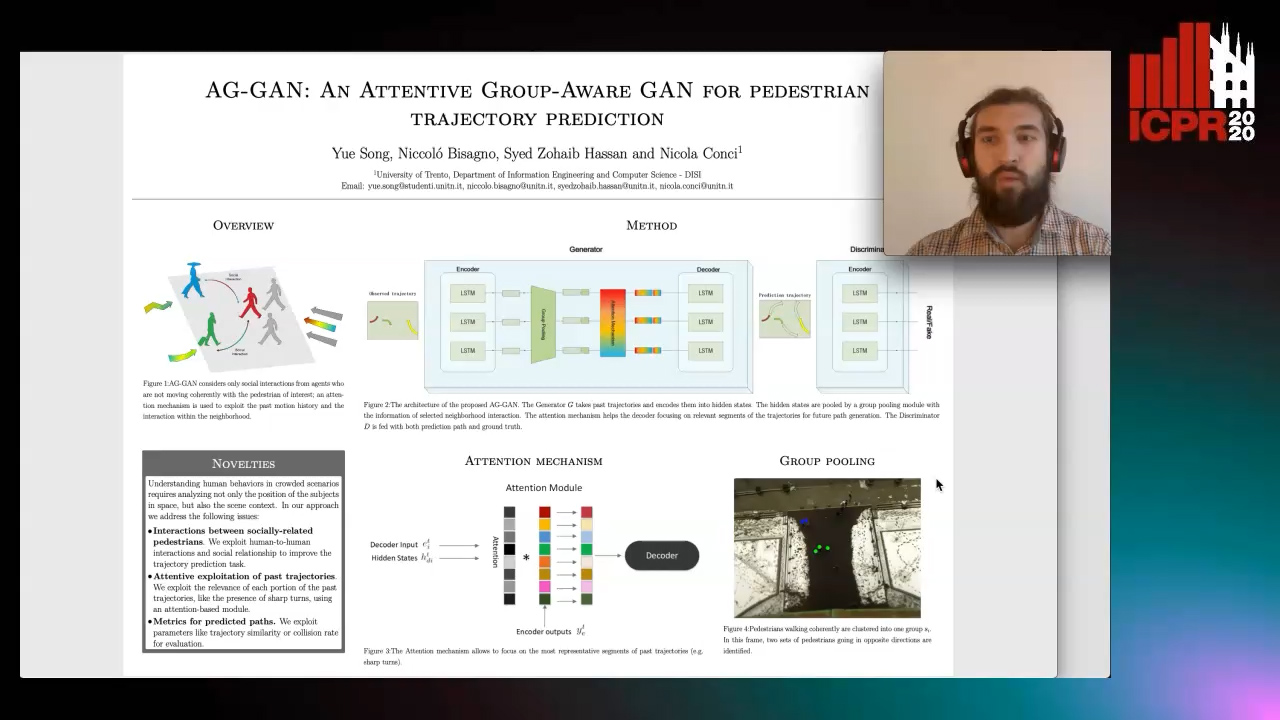
Auto-TLDR; An attentive group-aware GAN for motion prediction in crowded scenarios
Abstract Slides Poster Similar
Transformer Networks for Trajectory Forecasting
Francesco Giuliari, Hasan Irtiza, Marco Cristani, Fabio Galasso
Auto-TLDR; TransformerNetworks for Trajectory Prediction of People Interactions
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Mutual Information Based Method for Unsupervised Disentanglement of Video Representation
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; MIPAE: Mutual Information Predictive Auto-Encoder for Video Prediction
Abstract Slides Poster Similar
Reducing the Variance of Variational Estimates of Mutual Information by Limiting the Critic's Hypothesis Space to RKHS
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; Mutual Information Estimation from Variational Lower Bounds Using a Critic's Hypothesis Space
Learning to Take Directions One Step at a Time
Qiyang Hu, Adrian Wälchli, Tiziano Portenier, Matthias Zwicker, Paolo Favaro
Auto-TLDR; Generating a Sequence of Motion Strokes from a Single Image
Abstract Slides Poster Similar
Temporal Pattern Detection in Time-Varying Graphical Models
Federico Tomasi, Veronica Tozzo, Annalisa Barla
Auto-TLDR; A dynamical network inference model that leverages on kernels to consider general temporal patterns
Abstract Slides Poster Similar
End-To-End Multi-Task Learning of Missing Value Imputation and Forecasting in Time-Series Data
Jinhee Kim, Taesung Kim, Jang-Ho Choi, Jaegul Choo
Auto-TLDR; Time-Series Prediction with Denoising and Imputation of Missing Data
Abstract Slides Poster Similar
Tackling Contradiction Detection in German Using Machine Translation and End-To-End Recurrent Neural Networks
Maren Pielka, Rafet Sifa, Lars Patrick Hillebrand, David Biesner, Rajkumar Ramamurthy, Anna Ladi, Christian Bauckhage
Auto-TLDR; Contradiction Detection in Natural Language Inference using Recurrent Neural Networks
Abstract Slides Poster Similar
Online Trajectory Recovery from Offline Handwritten Japanese Kanji Characters of Multiple Strokes
Hung Tuan Nguyen, Tsubasa Nakamura, Cuong Tuan Nguyen, Masaki Nakagawa
Auto-TLDR; Recovering Dynamic Online Trajectories from Offline Japanese Kanji Character Images for Handwritten Character Recognition
Abstract Slides Poster Similar
Trajectory Representation Learning for Multi-Task NMRDP Planning
Firas Jarboui, Vianney Perchet
Auto-TLDR; Exploring Non Markovian Reward Decision Processes for Reinforcement Learning
Abstract Slides Poster Similar
Separation of Aleatoric and Epistemic Uncertainty in Deterministic Deep Neural Networks
Denis Huseljic, Bernhard Sick, Marek Herde, Daniel Kottke
Auto-TLDR; AE-DNN: Modeling Uncertainty in Deep Neural Networks
Abstract Slides Poster Similar
CardioGAN: An Attention-Based Generative Adversarial Network for Generation of Electrocardiograms
Subhrajyoti Dasgupta, Sudip Das, Ujjwal Bhattacharya
Auto-TLDR; CardioGAN: Generative Adversarial Network for Synthetic Electrocardiogram Signals
Abstract Slides Poster Similar
PoseCVAE: Anomalous Human Activity Detection
Yashswi Jain, Ashvini Kumar Sharma, Rajbabu Velmurugan, Biplab Banerjee
Auto-TLDR; PoseCVAE: Anomalous Human Activity Detection Using Generative Modeling
Abstract Slides Poster Similar
Naturally Constrained Online Expectation Maximization
Daniela Pamplona, Antoine Manzanera

Auto-TLDR; Constrained Online Expectation-Maximization for Probabilistic Principal Components Analysis
Abstract Slides Poster Similar
RNN Training along Locally Optimal Trajectories via Frank-Wolfe Algorithm
Yun Yue, Ming Li, Venkatesh Saligrama, Ziming Zhang
Auto-TLDR; Frank-Wolfe Algorithm for Efficient Training of RNNs
Abstract Slides Poster Similar
PIN: A Novel Parallel Interactive Network for Spoken Language Understanding
Peilin Zhou, Zhiqi Huang, Fenglin Liu, Yuexian Zou
Auto-TLDR; Parallel Interactive Network for Spoken Language Understanding
Abstract Slides Poster Similar
Learning Parameter Distributions to Detect Concept Drift in Data Streams
Johannes Haug, Gjergji Kasneci
Auto-TLDR; A novel framework for the detection of concept drift in streaming environments
Abstract Slides Poster Similar
Aggregating Dependent Gaussian Experts in Local Approximation
Auto-TLDR; A novel approach for aggregating the Gaussian experts by detecting strong violations of conditional independence
Abstract Slides Poster Similar
Stroke Based Posterior Attention for Online Handwritten Mathematical Expression Recognition
Changjie Wu, Qing Wang, Jianshu Zhang, Jun Du, Jiaming Wang, Jiajia Wu, Jin-Shui Hu
Auto-TLDR; Posterior Attention for Online Handwritten Mathematical Expression Recognition
Abstract Slides Poster Similar
Learning Stable Deep Predictive Coding Networks with Weight Norm Supervision
Auto-TLDR; Stability of Predictive Coding Network with Weight Norm Supervision
Abstract Slides Poster Similar
Epitomic Variational Graph Autoencoder
Rayyan Ahmad Khan, Muhammad Umer Anwaar, Martin Kleinsteuber
Auto-TLDR; EVGAE: A Generative Variational Autoencoder for Graph Data
Abstract Slides Poster Similar
3CS Algorithm for Efficient Gaussian Process Model Retrieval
Fabian Berns, Kjeld Schmidt, Ingolf Bracht, Christian Beecks
Auto-TLDR; Efficient retrieval of Gaussian Process Models for large-scale data using divide-&-conquer-based approach
Abstract Slides Poster Similar
VOWEL: A Local Online Learning Rule for Recurrent Networks of Probabilistic Spiking Winner-Take-All Circuits
Hyeryung Jang, Nicolas Skatchkovsky, Osvaldo Simeone
Auto-TLDR; VOWEL: A Variational Online Local Training Rule for Winner-Take-All Spiking Neural Networks
Interpretable Structured Learning with Sparse Gated Sequence Encoder for Protein-Protein Interaction Prediction
Kishan K C, Feng Cui, Anne Haake, Rui Li
Auto-TLDR; Predicting Protein-Protein Interactions Using Sequence Representations
Abstract Slides Poster Similar
Deep Transformation Models: Tackling Complex Regression Problems with Neural Network Based Transformation Models
Beate Sick, Torsten Hothorn, Oliver Dürr
Auto-TLDR; A Deep Transformation Model for Probabilistic Regression
Abstract Slides Poster Similar
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Variational Deep Embedding Clustering by Augmented Mutual Information Maximization
Qiang Ji, Yanfeng Sun, Yongli Hu, Baocai Yin
Auto-TLDR; Clustering by Augmented Mutual Information maximization for Deep Embedding
Abstract Slides Poster Similar
Signature Features with the Visibility Transformation
Yue Wu, Hao Ni, Terry Lyons, Robin Hudson

Auto-TLDR; The Visibility Transformation for Pattern Recognition
Abstract Slides Poster Similar
Variational Information Bottleneck Model for Accurate Indoor Position Recognition
Auto-TLDR; Variational Information Bottleneck for Indoor Positioning with WiFi Fingerprints
Abstract Slides Poster Similar
Variational Capsule Encoder
Harish Raviprakash, Syed Anwar, Ulas Bagci
Auto-TLDR; Bayesian Capsule Networks for Representation Learning in latent space
Abstract Slides Poster Similar
Feature-Aware Unsupervised Learning with Joint Variational Attention and Automatic Clustering
Wang Ru, Lin Li, Peipei Wang, Liu Peiyu

Auto-TLDR; Deep Variational Attention Encoder-Decoder for Clustering
Abstract Slides Poster Similar
Quantifying Model Uncertainty in Inverse Problems Via Bayesian Deep Gradient Descent
Riccardo Barbano, Chen Zhang, Simon Arridge, Bangti Jin
Auto-TLDR; Bayesian Neural Networks for Inverse Reconstruction via Bayesian Knowledge-Aided Computation
Abstract Slides Poster Similar
Probabilistic Latent Factor Model for Collaborative Filtering with Bayesian Inference
Jiansheng Fang, Xiaoqing Zhang, Yan Hu, Yanwu Xu, Ming Yang, Jiang Liu
Auto-TLDR; Bayesian Latent Factor Model for Collaborative Filtering
Emerging Relation Network and Task Embedding for Multi-Task Regression Problems
Auto-TLDR; A Comparative Study of Multi-Task Learning for Non-linear Time Series Problems
Abstract Slides Poster Similar
Generative Deep-Neural-Network Mixture Modeling with Semi-Supervised MinMax+EM Learning
Auto-TLDR; Semi-supervised Deep Neural Networks for Generative Mixture Modeling and Clustering
Abstract Slides Poster Similar
A Multilinear Sampling Algorithm to Estimate Shapley Values
Auto-TLDR; A sampling method for Shapley values for multilayer Perceptrons
Abstract Slides Poster Similar
MA-LSTM: A Multi-Attention Based LSTM for Complex Pattern Extraction
Jingjie Guo, Kelang Tian, Kejiang Ye, Cheng-Zhong Xu
Auto-TLDR; MA-LSTM: Multiple Attention based recurrent neural network for forget gate
Abstract Slides Poster Similar
GAN-Based Gaussian Mixture Model Responsibility Learning
Wanming Huang, Yi Da Xu, Shuai Jiang, Xuan Liang, Ian Oppermann
Auto-TLDR; Posterior Consistency Module for Gaussian Mixture Model
Abstract Slides Poster Similar
An Invariance-Guided Stability Criterion for Time Series Clustering Validation
Florent Forest, Alex Mourer, Mustapha Lebbah, Hanane Azzag, Jérôme Lacaille
Auto-TLDR; An invariance-guided method for clustering model selection in time series data
Abstract Slides Poster Similar
Data Normalization for Bilinear Structures in High-Frequency Financial Time-Series
Dat Thanh Tran, Juho Kanniainen, Moncef Gabbouj, Alexandros Iosifidis
Auto-TLDR; Bilinear Normalization for Financial Time-Series Analysis and Forecasting
Abstract Slides Poster Similar
Bayesian Active Learning for Maximal Information Gain on Model Parameters
Kasra Arnavaz, Aasa Feragen, Oswin Krause, Marco Loog
Auto-TLDR; Bayesian assumptions for Bayesian classification
Abstract Slides Poster Similar
SDMA: Saliency Driven Mutual Cross Attention for Multi-Variate Time Series
Auto-TLDR; Salient-Driven Mutual Cross Attention for Intelligent Time Series Analytics
Abstract Slides Poster Similar