Variational Information Bottleneck Model for Accurate Indoor Position Recognition
Auto-TLDR; Variational Information Bottleneck for Indoor Positioning with WiFi Fingerprints
Similar papers
Variational Capsule Encoder
Harish Raviprakash, Syed Anwar, Ulas Bagci
Auto-TLDR; Bayesian Capsule Networks for Representation Learning in latent space
Abstract Slides Poster Similar
Epitomic Variational Graph Autoencoder
Rayyan Ahmad Khan, Muhammad Umer Anwaar, Martin Kleinsteuber
Auto-TLDR; EVGAE: A Generative Variational Autoencoder for Graph Data
Abstract Slides Poster Similar
Variational Deep Embedding Clustering by Augmented Mutual Information Maximization
Qiang Ji, Yanfeng Sun, Yongli Hu, Baocai Yin
Auto-TLDR; Clustering by Augmented Mutual Information maximization for Deep Embedding
Abstract Slides Poster Similar
Feature-Aware Unsupervised Learning with Joint Variational Attention and Automatic Clustering
Wang Ru, Lin Li, Peipei Wang, Liu Peiyu

Auto-TLDR; Deep Variational Attention Encoder-Decoder for Clustering
Abstract Slides Poster Similar
Aggregating Dependent Gaussian Experts in Local Approximation
Auto-TLDR; A novel approach for aggregating the Gaussian experts by detecting strong violations of conditional independence
Abstract Slides Poster Similar
Separation of Aleatoric and Epistemic Uncertainty in Deterministic Deep Neural Networks
Denis Huseljic, Bernhard Sick, Marek Herde, Daniel Kottke
Auto-TLDR; AE-DNN: Modeling Uncertainty in Deep Neural Networks
Abstract Slides Poster Similar
Probabilistic Latent Factor Model for Collaborative Filtering with Bayesian Inference
Jiansheng Fang, Xiaoqing Zhang, Yan Hu, Yanwu Xu, Ming Yang, Jiang Liu
Auto-TLDR; Bayesian Latent Factor Model for Collaborative Filtering
Local Clustering with Mean Teacher for Semi-Supervised Learning
Zexi Chen, Benjamin Dutton, Bharathkumar Ramachandra, Tianfu Wu, Ranga Raju Vatsavai
Auto-TLDR; Local Clustering for Semi-supervised Learning
Deep Transformation Models: Tackling Complex Regression Problems with Neural Network Based Transformation Models
Beate Sick, Torsten Hothorn, Oliver Dürr
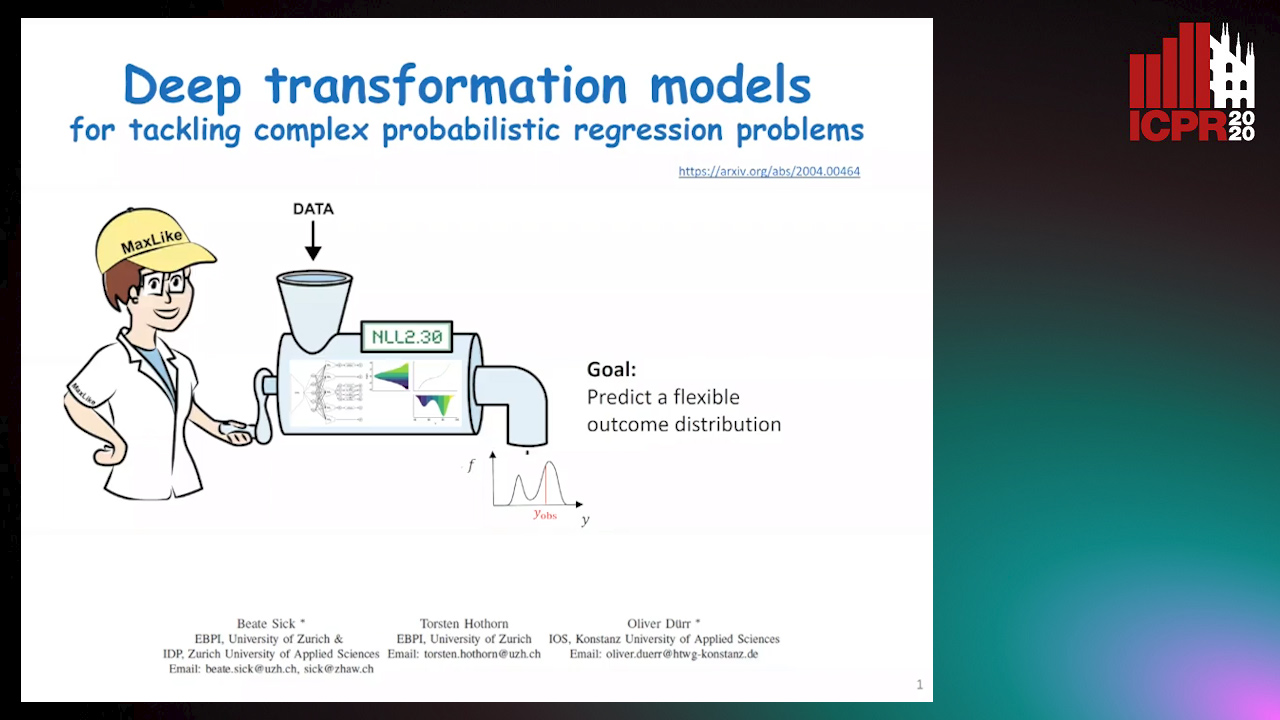
Auto-TLDR; A Deep Transformation Model for Probabilistic Regression
Abstract Slides Poster Similar
Mutual Information Based Method for Unsupervised Disentanglement of Video Representation
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; MIPAE: Mutual Information Predictive Auto-Encoder for Video Prediction
Abstract Slides Poster Similar
Reducing the Variance of Variational Estimates of Mutual Information by Limiting the Critic's Hypothesis Space to RKHS
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; Mutual Information Estimation from Variational Lower Bounds Using a Critic's Hypothesis Space
AVAE: Adversarial Variational Auto Encoder
Antoine Plumerault, Hervé Le Borgne, Celine Hudelot
Auto-TLDR; Combining VAE and GAN for Realistic Image Generation
Abstract Slides Poster Similar
Quantifying Model Uncertainty in Inverse Problems Via Bayesian Deep Gradient Descent
Riccardo Barbano, Chen Zhang, Simon Arridge, Bangti Jin
Auto-TLDR; Bayesian Neural Networks for Inverse Reconstruction via Bayesian Knowledge-Aided Computation
Abstract Slides Poster Similar
Ancient Document Layout Analysis: Autoencoders Meet Sparse Coding
Homa Davoudi, Marco Fiorucci, Arianna Traviglia
Auto-TLDR; Unsupervised Unsupervised Representation Learning for Document Layout Analysis
Abstract Slides Poster Similar
Single-Modal Incremental Terrain Clustering from Self-Supervised Audio-Visual Feature Learning
Reina Ishikawa, Ryo Hachiuma, Akiyoshi Kurobe, Hideo Saito
Auto-TLDR; Multi-modal Variational Autoencoder for Terrain Type Clustering
Abstract Slides Poster Similar
Switching Dynamical Systems with Deep Neural Networks
Cesar Ali Ojeda Marin, Kostadin Cvejoski, Bogdan Georgiev, Ramses J. Sanchez
Auto-TLDR; Variational RNN for Switching Dynamics
Abstract Slides Poster Similar
Image Representation Learning by Transformation Regression
Xifeng Guo, Jiyuan Liu, Sihang Zhou, En Zhu, Shihao Dong
Auto-TLDR; Self-supervised Image Representation Learning using Continuous Parameter Prediction
Abstract Slides Poster Similar
Wireless Localisation in WiFi Using Novel Deep Architectures
Peizheng Li, Han Cui, Aftab Khan, Usman Raza, Robert Piechocki, Angela Doufexi, Tim Farnham
Auto-TLDR; Deep Neural Network for Indoor Localisation of WiFi Devices in Indoor Environments
Abstract Slides Poster Similar
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Generalization Comparison of Deep Neural Networks Via Output Sensitivity
Mahsa Forouzesh, Farnood Salehi, Patrick Thiran
Auto-TLDR; Generalization of Deep Neural Networks using Sensitivity
Interpolation in Auto Encoders with Bridge Processes
Carl Ringqvist, Henrik Hult, Judith Butepage, Hedvig Kjellstrom
Auto-TLDR; Stochastic interpolations from auto encoders trained on flattened sequences
Abstract Slides Poster Similar
Adversarial Encoder-Multi-Task-Decoder for Multi-Stage Processes
Andre Mendes, Julian Togelius, Leandro Dos Santos Coelho

Auto-TLDR; Multi-Task Learning and Semi-Supervised Learning for Multi-Stage Processes
Phase Retrieval Using Conditional Generative Adversarial Networks
Tobias Uelwer, Alexander Oberstraß, Stefan Harmeling
Auto-TLDR; Conditional Generative Adversarial Networks for Phase Retrieval
Abstract Slides Poster Similar
Factor Screening Using Bayesian Active Learning and Gaussian Process Meta-Modelling
Cheng Li, Santu Rana, Andrew William Gill, Dang Nguyen, Sunil Kumar Gupta, Svetha Venkatesh

Auto-TLDR; Data-Efficient Bayesian Active Learning for Factor Screening in Combat Simulations
Multi-Modal Deep Clustering: Unsupervised Partitioning of Images
Auto-TLDR; Multi-Modal Deep Clustering for Unlabeled Images
Abstract Slides Poster Similar
Generative Deep-Neural-Network Mixture Modeling with Semi-Supervised MinMax+EM Learning
Auto-TLDR; Semi-supervised Deep Neural Networks for Generative Mixture Modeling and Clustering
Abstract Slides Poster Similar
The Aleatoric Uncertainty Estimation Using a Separate Formulation with Virtual Residuals
Takumi Kawashima, Qing Yu, Akari Asai, Daiki Ikami, Kiyoharu Aizawa
Auto-TLDR; Aleatoric Uncertainty Estimation in Regression Problems
Disentangled Representation Learning for Controllable Image Synthesis: An Information-Theoretic Perspective
Shichang Tang, Xu Zhou, Xuming He, Yi Ma
Auto-TLDR; Controllable Image Synthesis in Deep Generative Models using Variational Auto-Encoder
Abstract Slides Poster Similar
Deep Topic Modeling by Multilayer Bootstrap Network and Lasso
Auto-TLDR; Unsupervised Deep Topic Modeling with Multilayer Bootstrap Network and Lasso
Abstract Slides Poster Similar
Multi-Layered Discriminative Restricted Boltzmann Machine with Untrained Probabilistic Layer
Auto-TLDR; MDRBM: A Probabilistic Four-layered Neural Network for Extreme Learning Machine
Attack-Agnostic Adversarial Detection on Medical Data Using Explainable Machine Learning
Matthew Watson, Noura Al Moubayed
Auto-TLDR; Explainability-based Detection of Adversarial Samples on EHR and Chest X-Ray Data
Abstract Slides Poster Similar
Radar Image Reconstruction from Raw ADC Data Using Parametric Variational Autoencoder with Domain Adaptation
Michael Stephan, Thomas Stadelmayer, Avik Santra, Georg Fischer, Robert Weigel, Fabian Lurz
Auto-TLDR; Parametric Variational Autoencoder-based Human Target Detection and Localization for Frequency Modulated Continuous Wave Radar
Abstract Slides Poster Similar
Automatic Detection of Stationary Waves in the Venus’ Atmosphere Using Deep Generative Models
Minori Narita, Daiki Kimura, Takeshi Imamura
Auto-TLDR; Anomaly Detection of Large Bow-shaped Structures on the Venus Clouds using Variational Auto-encoder and Attention Maps
Abstract Slides Poster Similar
Trajectory-User Link with Attention Recurrent Networks
Tao Sun, Yongjun Xu, Fei Wang, Lin Wu, 塘文 钱, Zezhi Shao
Auto-TLDR; TULAR: Trajectory-User Link with Attention Recurrent Neural Networks
Abstract Slides Poster Similar
Edge-Aware Graph Attention Network for Ratio of Edge-User Estimation in Mobile Networks
Jiehui Deng, Sheng Wan, Xiang Wang, Enmei Tu, Xiaolin Huang, Jie Yang, Chen Gong
Auto-TLDR; EAGAT: Edge-Aware Graph Attention Network for Automatic REU Estimation in Mobile Networks
Abstract Slides Poster Similar
Cross-People Mobile-Phone Based Airwriting Character Recognition
Yunzhe Li, Hui Zheng, He Zhu, Haojun Ai, Xiaowei Dong
Auto-TLDR; Cross-People Airwriting Recognition via Motion Sensor Signal via Deep Neural Network
Abstract Slides Poster Similar
Beyond Cross-Entropy: Learning Highly Separable Feature Distributions for Robust and Accurate Classification
Arslan Ali, Andrea Migliorati, Tiziano Bianchi, Enrico Magli
Auto-TLDR; Gaussian class-conditional simplex loss for adversarial robust multiclass classifiers
Abstract Slides Poster Similar
Generative Latent Implicit Conditional Optimization When Learning from Small Sample
Auto-TLDR; GLICO: Generative Latent Implicit Conditional Optimization for Small Sample Learning
Abstract Slides Poster Similar
NeuralFP: Out-Of-Distribution Detection Using Fingerprints of Neural Networks
Wei-Han Lee, Steve Millman, Nirmit Desai, Mudhakar Srivatsa, Changchang Liu
Auto-TLDR; NeuralFP: Detecting Out-of-Distribution Records Using Neural Network Models
Abstract Slides Poster Similar
Visual Localization for Autonomous Driving: Mapping the Accurate Location in the City Maze
Dongfang Liu, Yiming Cui, Xiaolei Guo, Wei Ding, Baijian Yang, Yingjie Chen

Auto-TLDR; Feature Voting for Robust Visual Localization in Urban Settings
Abstract Slides Poster Similar
Respecting Domain Relations: Hypothesis Invariance for Domain Generalization
Ziqi Wang, Marco Loog, Jan Van Gemert
Auto-TLDR; Learning Hypothesis Invariant Representations for Domain Generalization
Abstract Slides Poster Similar
A Joint Representation Learning and Feature Modeling Approach for One-Class Recognition
Pramuditha Perera, Vishal Patel
Auto-TLDR; Combining Generative Features and One-Class Classification for Effective One-class Recognition
Abstract Slides Poster Similar
In Depth Semantic Scene Completion
Auto-TLDR; Bayesian Convolutional Neural Network for Semantic Scene Completion
Abstract Slides Poster Similar
Fully Convolutional Neural Networks for Raw Eye Tracking Data Segmentation, Generation, and Reconstruction
Wolfgang Fuhl, Yao Rong, Enkelejda Kasneci
Auto-TLDR; Semantic Segmentation of Eye Tracking Data with Fully Convolutional Neural Networks
Abstract Slides Poster Similar
PoseCVAE: Anomalous Human Activity Detection
Yashswi Jain, Ashvini Kumar Sharma, Rajbabu Velmurugan, Biplab Banerjee
Auto-TLDR; PoseCVAE: Anomalous Human Activity Detection Using Generative Modeling
Abstract Slides Poster Similar
GAN-Based Gaussian Mixture Model Responsibility Learning
Wanming Huang, Yi Da Xu, Shuai Jiang, Xuan Liang, Ian Oppermann
Auto-TLDR; Posterior Consistency Module for Gaussian Mixture Model
Abstract Slides Poster Similar
Deep Convolutional Embedding for Digitized Painting Clustering
Giovanna Castellano, Gennaro Vessio
Auto-TLDR; A Deep Convolutional Embedding Model for Clustering Artworks
Abstract Slides Poster Similar
Meta Learning Via Learned Loss
Sarah Bechtle, Artem Molchanov, Yevgen Chebotar, Edward Thomas Grefenstette, Ludovic Righetti, Gaurav Sukhatme, Franziska Meier
Auto-TLDR; meta-learning for learning parametric loss functions that generalize across different tasks and model architectures