Single-Modal Incremental Terrain Clustering from Self-Supervised Audio-Visual Feature Learning
Reina Ishikawa,
Ryo Hachiuma,
Akiyoshi Kurobe,
Hideo Saito
Auto-TLDR; Multi-modal Variational Autoencoder for Terrain Type Clustering
Similar papers
Surface Material Dataset for Robotics Applications (SMDRA): A Dataset with Friction Coefficient and RGB-D for Surface Segmentation
Donghun Noh, Hyunwoo Nam, Min Sung Ahn, Hosik Chae, Sangjoon Lee, Kyle Gillespie, Dennis Hong
Auto-TLDR; A Surface Material Dataset for Robotics Applications
Abstract Slides Poster Similar
Multi-Modal Deep Clustering: Unsupervised Partitioning of Images
Auto-TLDR; Multi-Modal Deep Clustering for Unlabeled Images
Abstract Slides Poster Similar
Improving Mix-And-Separate Training in Audio-Visual Sound Source Separation with an Object Prior
Quan Nguyen, Simone Frintrop, Timo Gerkmann, Mikko Lauri, Julius Richter
Auto-TLDR; Object-Prior: Learning the 1-to-1 correspondence between visual and audio signals by audio- visual sound source methods
ESResNet: Environmental Sound Classification Based on Visual Domain Models
Andrey Guzhov, Federico Raue, Jörn Hees, Andreas Dengel
Auto-TLDR; Environmental Sound Classification with Short-Time Fourier Transform Spectrograms
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Self-Supervised Joint Encoding of Motion and Appearance for First Person Action Recognition
Mirco Planamente, Andrea Bottino, Barbara Caputo

Auto-TLDR; A Single Stream Architecture for Egocentric Action Recognition from the First-Person Point of View
Abstract Slides Poster Similar
Deep Convolutional Embedding for Digitized Painting Clustering
Giovanna Castellano, Gennaro Vessio
Auto-TLDR; A Deep Convolutional Embedding Model for Clustering Artworks
Abstract Slides Poster Similar
S2I-Bird: Sound-To-Image Generation of Bird Species Using Generative Adversarial Networks
Joo Yong Shim, Joongheon Kim, Jong-Kook Kim
Auto-TLDR; Generating bird images from sound using conditional generative adversarial networks
Abstract Slides Poster Similar
Feature-Aware Unsupervised Learning with Joint Variational Attention and Automatic Clustering
Wang Ru, Lin Li, Peipei Wang, Liu Peiyu

Auto-TLDR; Deep Variational Attention Encoder-Decoder for Clustering
Abstract Slides Poster Similar
Unsupervised Co-Segmentation for Athlete Movements and Live Commentaries Using Crossmodal Temporal Proximity
Yasunori Ohishi, Yuki Tanaka, Kunio Kashino
Auto-TLDR; A guided attention scheme for audio-visual co-segmentation
Abstract Slides Poster Similar
Low Dimensional State Representation Learning with Reward-Shaped Priors
Nicolò Botteghi, Ruben Obbink, Daan Geijs, Mannes Poel, Beril Sirmacek, Christoph Brune, Abeje Mersha, Stefano Stramigioli

Auto-TLDR; Unsupervised Learning for Unsupervised Reinforcement Learning in Robotics
Variational Deep Embedding Clustering by Augmented Mutual Information Maximization
Qiang Ji, Yanfeng Sun, Yongli Hu, Baocai Yin
Auto-TLDR; Clustering by Augmented Mutual Information maximization for Deep Embedding
Abstract Slides Poster Similar
Audio-Visual Predictive Coding for Self-Supervised Visual Representation Learning
Mani Kumar Tellamekala, Michel Valstar, Michael Pound, Timo Giesbrecht
Auto-TLDR; AV-PPC: A Multi-task Learning Framework for Learning Semantic Visual Features from Unlabeled Video Data
Abstract Slides Poster Similar
Mutual Information Based Method for Unsupervised Disentanglement of Video Representation
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; MIPAE: Mutual Information Predictive Auto-Encoder for Video Prediction
Abstract Slides Poster Similar
N2D: (Not Too) Deep Clustering Via Clustering the Local Manifold of an Autoencoded Embedding
Ryan Mcconville, Raul Santos-Rodriguez, Robert Piechocki, Ian Craddock
Auto-TLDR; Local Manifold Learning for Deep Clustering on Autoencoded Embeddings
Reducing the Variance of Variational Estimates of Mutual Information by Limiting the Critic's Hypothesis Space to RKHS
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; Mutual Information Estimation from Variational Lower Bounds Using a Critic's Hypothesis Space
Person Recognition with HGR Maximal Correlation on Multimodal Data
Yihua Liang, Fei Ma, Yang Li, Shao-Lun Huang
Auto-TLDR; A correlation-based multimodal person recognition framework that learns discriminative embeddings of persons by joint learning visual features and audio features
Abstract Slides Poster Similar
GAN-Based Gaussian Mixture Model Responsibility Learning
Wanming Huang, Yi Da Xu, Shuai Jiang, Xuan Liang, Ian Oppermann
Auto-TLDR; Posterior Consistency Module for Gaussian Mixture Model
Abstract Slides Poster Similar
The Color Out of Space: Learning Self-Supervised Representations for Earth Observation Imagery
Stefano Vincenzi, Angelo Porrello, Pietro Buzzega, Marco Cipriano, Pietro Fronte, Roberto Cuccu, Carla Ippoliti, Annamaria Conte, Simone Calderara
Auto-TLDR; Satellite Image Representation Learning for Remote Sensing
Abstract Slides Poster Similar
Video Anomaly Detection by Estimating Likelihood of Representations
Auto-TLDR; Video Anomaly Detection in the latent feature space using a deep probabilistic model
Abstract Slides Poster Similar
Generative Deep-Neural-Network Mixture Modeling with Semi-Supervised MinMax+EM Learning
Auto-TLDR; Semi-supervised Deep Neural Networks for Generative Mixture Modeling and Clustering
Abstract Slides Poster Similar
Image Representation Learning by Transformation Regression
Xifeng Guo, Jiyuan Liu, Sihang Zhou, En Zhu, Shihao Dong
Auto-TLDR; Self-supervised Image Representation Learning using Continuous Parameter Prediction
Abstract Slides Poster Similar
Ballroom Dance Recognition from Audio Recordings
Tomas Pavlin, Jan Cech, Jiri Matas
Auto-TLDR; A CNN-based approach to classify ballroom dances given audio recordings
Abstract Slides Poster Similar
A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control
Zahra Gharaee, Karl Holmquist, Linbo He, Michael Felsberg

Auto-TLDR; Bayesian Reinforcement Learning for Autonomous Driving
Abstract Slides Poster Similar
Robust Audio-Visual Speech Recognition Based on Hybrid Fusion
Hong Liu, Wenhao Li, Bing Yang
Auto-TLDR; Hybrid Fusion Based AVSR with Residual Networks and Bidirectional Gated Recurrent Unit for Robust Speech Recognition in Noise Conditions
Abstract Slides Poster Similar
Multimodal End-To-End Learning for Autonomous Steering in Adverse Road and Weather Conditions
Jyri Sakari Maanpää, Josef Taher, Petri Manninen, Leo Pakola, Iaroslav Melekhov, Juha Hyyppä

Auto-TLDR; End-to-End Learning for Autonomous Steering in Adverse Road and Weather Conditions with Lidar Data
Abstract Slides Poster Similar
Anticipating Activity from Multimodal Signals
Tiziana Rotondo, Giovanni Maria Farinella, Davide Giacalone, Sebastiano Mauro Strano, Valeria Tomaselli, Sebastiano Battiato
Auto-TLDR; Exploiting Multimodal Signal Embedding Space for Multi-Action Prediction
Abstract Slides Poster Similar
Which are the factors affecting the performance of audio surveillance systems?
Antonio Greco, Antonio Roberto, Alessia Saggese, Mario Vento
Auto-TLDR; Sound Event Recognition Using Convolutional Neural Networks and Visual Representations on MIVIA Audio Events
Radar Image Reconstruction from Raw ADC Data Using Parametric Variational Autoencoder with Domain Adaptation
Michael Stephan, Thomas Stadelmayer, Avik Santra, Georg Fischer, Robert Weigel, Fabian Lurz
Auto-TLDR; Parametric Variational Autoencoder-based Human Target Detection and Localization for Frequency Modulated Continuous Wave Radar
Abstract Slides Poster Similar
A Joint Representation Learning and Feature Modeling Approach for One-Class Recognition
Pramuditha Perera, Vishal Patel
Auto-TLDR; Combining Generative Features and One-Class Classification for Effective One-class Recognition
Abstract Slides Poster Similar
Spatial Bias in Vision-Based Voice Activity Detection
Kalin Stefanov, Mohammad Adiban, Giampiero Salvi
Auto-TLDR; Spatial Bias in Vision-based Voice Activity Detection in Multiparty Human-Human Interactions
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Modeling Extent-Of-Texture Information for Ground Terrain Recognition
Shuvozit Ghose, Pinaki Nath Chowdhury, Partha Pratim Roy, Umapada Pal
Auto-TLDR; Extent-of-Texture Guided Inter-domain Message Passing for Ground Terrain Recognition
Abstract Slides Poster Similar
Variational Capsule Encoder
Harish Raviprakash, Syed Anwar, Ulas Bagci
Auto-TLDR; Bayesian Capsule Networks for Representation Learning in latent space
Abstract Slides Poster Similar
Self-Supervised Learning of Dynamic Representations for Static Images
Siyang Song, Enrique Sanchez, Linlin Shen, Michel Valstar

Auto-TLDR; Facial Action Unit Intensity Estimation and Affect Estimation from Still Images with Multiple Temporal Scale
Abstract Slides Poster Similar
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
Developing Motion Code Embedding for Action Recognition in Videos
Maxat Alibayev, David Andrea Paulius, Yu Sun
Auto-TLDR; Motion Embedding via Motion Codes for Action Recognition
Abstract Slides Poster Similar
Cascade Attention Guided Residue Learning GAN for Cross-Modal Translation
Bin Duan, Wei Wang, Hao Tang, Hugo Latapie, Yan Yan
Auto-TLDR; Cascade Attention-Guided Residue GAN for Cross-modal Audio-Visual Learning
Abstract Slides Poster Similar
Surface IR Reflectance Estimation and Material Recognition Using ToF Camera
Auto-TLDR; Material Type Recognition Using IR Reflectance Based Material Type Recognitions
Abstract Slides Poster Similar
AttendAffectNet: Self-Attention Based Networks for Predicting Affective Responses from Movies
Thi Phuong Thao Ha, Bt Balamurali, Herremans Dorien, Roig Gemma
Auto-TLDR; AttendAffectNet: A Self-Attention Based Network for Emotion Prediction from Movies
Abstract Slides Poster Similar
Variational Information Bottleneck Model for Accurate Indoor Position Recognition
Auto-TLDR; Variational Information Bottleneck for Indoor Positioning with WiFi Fingerprints
Abstract Slides Poster Similar
A Prototype-Based Generalized Zero-Shot Learning Framework for Hand Gesture Recognition
Jinting Wu, Yujia Zhang, Xiao-Guang Zhao
Auto-TLDR; Generalized Zero-Shot Learning for Hand Gesture Recognition
Abstract Slides Poster Similar
Temporally Coherent Embeddings for Self-Supervised Video Representation Learning
Joshua Knights, Ben Harwood, Daniel Ward, Anthony Vanderkop, Olivia Mackenzie-Ross, Peyman Moghadam
Auto-TLDR; Temporally Coherent Embeddings for Self-supervised Video Representation Learning
Abstract Slides Poster Similar
JECL: Joint Embedding and Cluster Learning for Image-Text Pairs
Sean Yang, Kuan-Hao Huang, Bill Howe
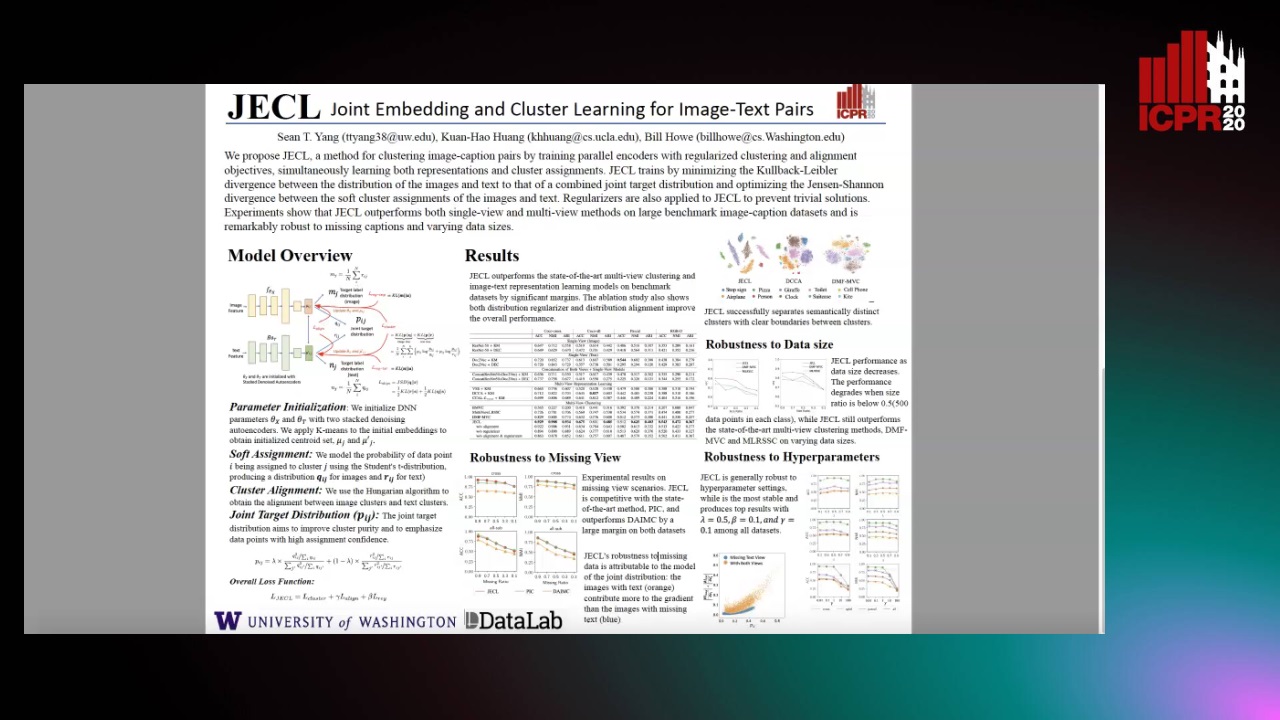
Auto-TLDR; JECL: Clustering Image-Caption Pairs with Parallel Encoders and Regularized Clusters
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar