Radar Image Reconstruction from Raw ADC Data Using Parametric Variational Autoencoder with Domain Adaptation
Michael Stephan,
Thomas Stadelmayer,
Avik Santra,
Georg Fischer,
Robert Weigel,
Fabian Lurz
Auto-TLDR; Parametric Variational Autoencoder-based Human Target Detection and Localization for Frequency Modulated Continuous Wave Radar
Similar papers
CARRADA Dataset: Camera and Automotive Radar with Range-Angle-Doppler Annotations
Arthur Ouaknine, Alasdair Newson, Julien Rebut, Florence Tupin, Patrick Pérez

Auto-TLDR; CARRADA: A dataset of synchronized camera and radar recordings with range-angle-Doppler annotations for autonomous driving
Abstract Slides Poster Similar
Air-Writing with Sparse Network of Radars Using Spatio-Temporal Learning
Muhammad Arsalan, Avik Santra, Kay Bierzynski, Vadim Issakov
Auto-TLDR; An Air-writing System for Sparse Radars using Deep Convolutional Neural Networks
Abstract Slides Poster Similar
Wireless Localisation in WiFi Using Novel Deep Architectures
Peizheng Li, Han Cui, Aftab Khan, Usman Raza, Robert Piechocki, Angela Doufexi, Tim Farnham
Auto-TLDR; Deep Neural Network for Indoor Localisation of WiFi Devices in Indoor Environments
Abstract Slides Poster Similar
Ghost Target Detection in 3D Radar Data Using Point Cloud Based Deep Neural Network
Mahdi Chamseddine, Jason Rambach, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Point Based Deep Learning for Ghost Target Detection in 3D Radar Point Clouds
Abstract Slides Poster Similar
Deep Learning on Active Sonar Data Using Bayesian Optimization for Hyperparameter Tuning
Henrik Berg, Karl Thomas Hjelmervik
Auto-TLDR; Bayesian Optimization for Sonar Operations in Littoral Environments
Abstract Slides Poster Similar
Translation Resilient Opportunistic WiFi Sensing
Mohammud Junaid Bocus, Wenda Li, Jonas Paulavičius, Ryan Mcconville, Raul Santos-Rodriguez, Kevin Chetty, Robert Piechocki
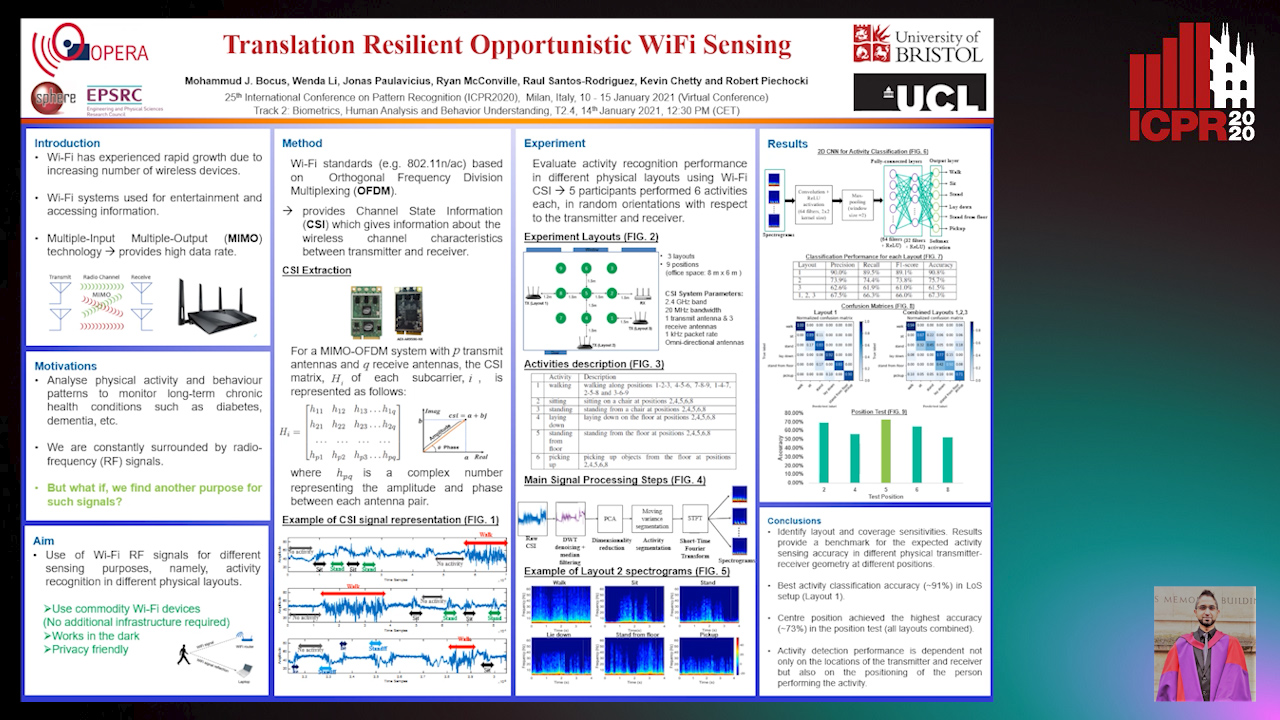
Auto-TLDR; Activity Recognition using Fine-Grained WiFi Channel State Information using WiFi CSI
Abstract Slides Poster Similar
Improving Gravitational Wave Detection with 2D Convolutional Neural Networks
Siyu Fan, Yisen Wang, Yuan Luo, Alexander Michael Schmitt, Shenghua Yu
Auto-TLDR; Two-dimensional Convolutional Neural Networks for Gravitational Wave Detection from Time Series with Background Noise
Feature Engineering and Stacked Echo State Networks for Musical Onset Detection
Peter Steiner, Azarakhsh Jalalvand, Simon Stone, Peter Birkholz
Auto-TLDR; Echo State Networks for Onset Detection in Music Analysis
Abstract Slides Poster Similar
Uncertainty Guided Recognition of Tiny Craters on the Moon
Thorsten Wilhelm, Christian Wöhler

Auto-TLDR; Accurately Detecting Tiny Craters in Remote Sensed Images Using Deep Neural Networks
Abstract Slides Poster Similar
Fully Convolutional Neural Networks for Raw Eye Tracking Data Segmentation, Generation, and Reconstruction
Wolfgang Fuhl, Yao Rong, Enkelejda Kasneci
Auto-TLDR; Semantic Segmentation of Eye Tracking Data with Fully Convolutional Neural Networks
Abstract Slides Poster Similar
Real-Time Drone Detection and Tracking with Visible, Thermal and Acoustic Sensors
Fredrik Svanström, Cristofer Englund, Fernando Alonso-Fernandez
Auto-TLDR; Automatic multi-sensor drone detection using sensor fusion
Abstract Slides Poster Similar
Hybrid Network for End-To-End Text-Independent Speaker Identification
Wajdi Ghezaiel, Luc Brun, Olivier Lezoray
Auto-TLDR; Text-Independent Speaker Identification with Scattering Wavelet Network and Convolutional Neural Networks
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
Single-Modal Incremental Terrain Clustering from Self-Supervised Audio-Visual Feature Learning
Reina Ishikawa, Ryo Hachiuma, Akiyoshi Kurobe, Hideo Saito
Auto-TLDR; Multi-modal Variational Autoencoder for Terrain Type Clustering
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
ESResNet: Environmental Sound Classification Based on Visual Domain Models
Andrey Guzhov, Federico Raue, Jörn Hees, Andreas Dengel
Auto-TLDR; Environmental Sound Classification with Short-Time Fourier Transform Spectrograms
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Temporal Pulses Driven Spiking Neural Network for Time and Power Efficient Object Recognition in Autonomous Driving
Wei Wang, Shibo Zhou, Jingxi Li, Xiaohua Li, Junsong Yuan, Zhanpeng Jin

Auto-TLDR; Spiking Neural Network for Real-Time Object Recognition on Temporal LiDAR Pulses
Abstract Slides Poster Similar
Self-Supervised Detection and Pose Estimation of Logistical Objects in 3D Sensor Data
Nikolas Müller, Jonas Stenzel, Jian-Jia Chen

Auto-TLDR; A self-supervised and fully automated deep learning approach for object pose estimation using simulated 3D data
Abstract Slides Poster Similar
Variational Capsule Encoder
Harish Raviprakash, Syed Anwar, Ulas Bagci
Auto-TLDR; Bayesian Capsule Networks for Representation Learning in latent space
Abstract Slides Poster Similar
Space-Time Domain Tensor Neural Networks: An Application on Human Pose Classification
Konstantinos Makantasis, Athanasios Voulodimos, Anastasios Doulamis, Nikolaos Doulamis, Nikolaos Bakalos
Auto-TLDR; Tensor-Based Neural Network for Spatiotemporal Pose Classifiaction using Three-Dimensional Skeleton Data
Abstract Slides Poster Similar
Detection and Correspondence Matching of Corneal Reflections for Eye Tracking Using Deep Learning
Soumil Chugh, Braiden Brousseau, Jonathan Rose, Moshe Eizenman
Auto-TLDR; A Fully Convolutional Neural Network for Corneal Reflection Detection and Matching in Extended Reality Eye Tracking Systems
Abstract Slides Poster Similar
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
Location Prediction in Real Homes of Older Adults based on K-Means in Low-Resolution Depth Videos
Simon Simonsson, Flávia Dias Casagrande, Evi Zouganeli
Auto-TLDR; Semi-supervised Learning for Location Recognition and Prediction in Smart Homes using Depth Video Cameras
Abstract Slides Poster Similar
Planar 3D Transfer Learning for End to End Unimodal MRI Unbalanced Data Segmentation
Martin Kolarik, Radim Burget, Carlos M. Travieso-Gonzalez, Jan Kocica
Auto-TLDR; Planar 3D Res-U-Net Network for Unbalanced 3D Image Segmentation using Fluid Attenuation Inversion Recover
Cross-People Mobile-Phone Based Airwriting Character Recognition
Yunzhe Li, Hui Zheng, He Zhu, Haojun Ai, Xiaowei Dong
Auto-TLDR; Cross-People Airwriting Recognition via Motion Sensor Signal via Deep Neural Network
Abstract Slides Poster Similar
Digit Recognition Applied to Reconstructed Audio Signals Using Deep Learning
Anastasia-Sotiria Toufa, Constantine Kotropoulos
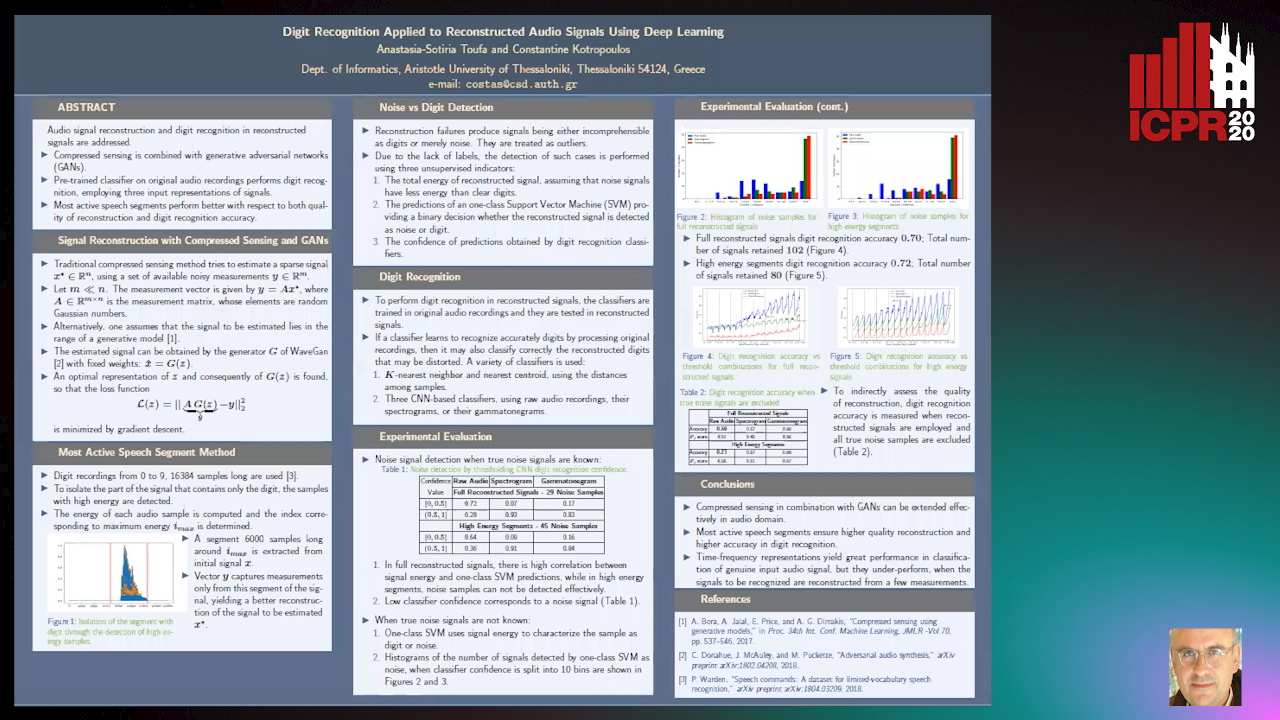
Auto-TLDR; Compressed Sensing for Digit Recognition in Audio Reconstruction
Estimation of Clinical Tremor Using Spatio-Temporal Adversarial AutoEncoder
Li Zhang, Vidya Koesmahargyo, Isaac Galatzer-Levy
Auto-TLDR; ST-AAE: Spatio-temporal Adversarial Autoencoder for Clinical Assessment of Hand Tremor Frequency and Severity
Abstract Slides Poster Similar
Phase Retrieval Using Conditional Generative Adversarial Networks
Tobias Uelwer, Alexander Oberstraß, Stefan Harmeling
Auto-TLDR; Conditional Generative Adversarial Networks for Phase Retrieval
Abstract Slides Poster Similar
Detecting Marine Species in Echograms Via Traditional, Hybrid, and Deep Learning Frameworks
Porto Marques Tunai, Alireza Rezvanifar, Melissa Cote, Alexandra Branzan Albu, Kaan Ersahin, Todd Mudge, Stephane Gauthier
Auto-TLDR; End-to-End Deep Learning for Echogram Interpretation of Marine Species in Echograms
Abstract Slides Poster Similar
Deep Convolutional Embedding for Digitized Painting Clustering
Giovanna Castellano, Gennaro Vessio
Auto-TLDR; A Deep Convolutional Embedding Model for Clustering Artworks
Abstract Slides Poster Similar
Not All Domains Are Equally Complex: Adaptive Multi-Domain Learning
Ali Senhaji, Jenni Karoliina Raitoharju, Moncef Gabbouj, Alexandros Iosifidis
Auto-TLDR; Adaptive Parameterization for Multi-Domain Learning
Abstract Slides Poster Similar
Graph Convolutional Neural Networks for Power Line Outage Identification

Auto-TLDR; Graph Convolutional Networks for Power Line Outage Identification
Resource-efficient DNNs for Keyword Spotting using Neural Architecture Search and Quantization
David Peter, Wolfgang Roth, Franz Pernkopf
Auto-TLDR; Neural Architecture Search for Keyword Spotting in Limited Resource Environments
Abstract Slides Poster Similar
Dynamically Mitigating Data Discrepancy with Balanced Focal Loss for Replay Attack Detection
Yongqiang Dou, Haocheng Yang, Maolin Yang, Yanyan Xu, Dengfeng Ke
Auto-TLDR; Anti-Spoofing with Balanced Focal Loss Function and Combination Features
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
Trainable Spectrally Initializable Matrix Transformations in Convolutional Neural Networks
Michele Alberti, Angela Botros, Schuetz Narayan, Rolf Ingold, Marcus Liwicki, Mathias Seuret
Auto-TLDR; Trainable and Spectrally Initializable Matrix Transformations for Neural Networks
Abstract Slides Poster Similar
From Human Pose to On-Body Devices for Human-Activity Recognition
Fernando Moya Rueda, Gernot Fink
Auto-TLDR; Transfer Learning from Human Pose Estimation for Human Activity Recognition using Inertial Measurements from On-Body Devices
Abstract Slides Poster Similar
Expectation-Maximization for Scheduling Problems in Satellite Communication
Werner Bailer, Martin Winter, Johannes Ebert, Joel Flavio, Karin Plimon
Auto-TLDR; Unsupervised Machine Learning for Satellite Communication Using Expectation-Maximization
Abstract Slides Poster Similar
Explainable Online Validation of Machine Learning Models for Practical Applications
Wolfgang Fuhl, Yao Rong, Thomas Motz, Michael Scheidt, Andreas Markus Hartel, Andreas Koch, Enkelejda Kasneci
Auto-TLDR; A Reformulation of Regression and Classification for Machine Learning Algorithm Validation
Abstract Slides Poster Similar
Exploring Spatial-Temporal Representations for fNIRS-based Intimacy Detection via an Attention-enhanced Cascade Convolutional Recurrent Neural Network
Chao Li, Qian Zhang, Ziping Zhao
Auto-TLDR; Intimate Relationship Prediction by Attention-enhanced Cascade Convolutional Recurrent Neural Network Using Functional Near-Infrared Spectroscopy
Abstract Slides Poster Similar
Shape Consistent 2D Keypoint Estimation under Domain Shift
Levi Vasconcelos, Massimiliano Mancini, Davide Boscaini, Barbara Caputo, Elisa Ricci

Auto-TLDR; Deep Adaptation for Keypoint Prediction under Domain Shift
Abstract Slides Poster Similar
Separation of Aleatoric and Epistemic Uncertainty in Deterministic Deep Neural Networks
Denis Huseljic, Bernhard Sick, Marek Herde, Daniel Kottke
Auto-TLDR; AE-DNN: Modeling Uncertainty in Deep Neural Networks
Abstract Slides Poster Similar
EasiECG: A Novel Inter-Patient Arrhythmia Classification Method Using ECG Waves
Chuanqi Han, Ruoran Huang, Fang Yu, Xi Huang, Li Cui
Auto-TLDR; EasiECG: Attention-based Convolution Factorization Machines for Arrhythmia Classification
Abstract Slides Poster Similar
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
Conditional-UNet: A Condition-Aware Deep Model for Coherent Human Activity Recognition from Wearables
Liming Zhang, Wenbin Zhang, Nathalie Japkowicz
Auto-TLDR; Coherent Human Activity Recognition from Multi-Channel Time Series Data
Abstract Slides Poster Similar
Video Anomaly Detection by Estimating Likelihood of Representations
Auto-TLDR; Video Anomaly Detection in the latent feature space using a deep probabilistic model
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar