Detection and Correspondence Matching of Corneal Reflections for Eye Tracking Using Deep Learning
Soumil Chugh,
Braiden Brousseau,
Jonathan Rose,
Moshe Eizenman
Auto-TLDR; A Fully Convolutional Neural Network for Corneal Reflection Detection and Matching in Extended Reality Eye Tracking Systems
Similar papers
User-Independent Gaze Estimation by Extracting Pupil Parameter and Its Mapping to the Gaze Angle

Auto-TLDR; Gaze Point Estimation using Pupil Shape for Generalization
Abstract Slides Poster Similar
Fully Convolutional Neural Networks for Raw Eye Tracking Data Segmentation, Generation, and Reconstruction
Wolfgang Fuhl, Yao Rong, Enkelejda Kasneci
Auto-TLDR; Semantic Segmentation of Eye Tracking Data with Fully Convolutional Neural Networks
Abstract Slides Poster Similar
Adaptive Feature Fusion Network for Gaze Tracking in Mobile Tablets
Yiwei Bao, Yihua Cheng, Yunfei Liu, Feng Lu
Auto-TLDR; Adaptive Feature Fusion Network for Multi-stream Gaze Estimation in Mobile Tablets
Abstract Slides Poster Similar
Estimating Gaze Points from Facial Landmarks by a Remote Spherical Camera
Auto-TLDR; Gaze Point Estimation from a Spherical Image from Facial Landmarks
Abstract Slides Poster Similar
Classifying Eye-Tracking Data Using Saliency Maps
Shafin Rahman, Sejuti Rahman, Omar Shahid, Md. Tahmeed Abdullah, Jubair Ahmed Sourov
Auto-TLDR; Saliency-based Feature Extraction for Automatic Classification of Eye-tracking Data
Abstract Slides Poster Similar
Ghost Target Detection in 3D Radar Data Using Point Cloud Based Deep Neural Network
Mahdi Chamseddine, Jason Rambach, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Point Based Deep Learning for Ghost Target Detection in 3D Radar Point Clouds
Abstract Slides Poster Similar
Collaborative Human Machine Attention Module for Character Recognition
Chetan Ralekar, Tapan Gandhi, Santanu Chaudhury
Auto-TLDR; A Collaborative Human-Machine Attention Module for Deep Neural Networks
Abstract Slides Poster Similar
A General End-To-End Method for Characterizing Neuropsychiatric Disorders Using Free-Viewing Visual Scanning Tasks
Hong Yue Sean Liu, Jonathan Chung, Moshe Eizenman
Auto-TLDR; A general, data-driven, end-to-end framework that extracts relevant features of attentional bias from visual scanning behaviour and uses these features
Abstract Slides Poster Similar
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
Transfer Learning through Weighted Loss Function and Group Normalization for Vessel Segmentation from Retinal Images
Abdullah Sarhan, Jon Rokne, Reda Alhajj, Andrew Crichton
Auto-TLDR; Deep Learning for Segmentation of Blood Vessels in Retinal Images
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Explainable Online Validation of Machine Learning Models for Practical Applications
Wolfgang Fuhl, Yao Rong, Thomas Motz, Michael Scheidt, Andreas Markus Hartel, Andreas Koch, Enkelejda Kasneci
Auto-TLDR; A Reformulation of Regression and Classification for Machine Learning Algorithm Validation
Abstract Slides Poster Similar
DE-Net: Dilated Encoder Network for Automated Tongue Segmentation
Hui Tang, Bin Wang, Jun Zhou, Yongsheng Gao

Auto-TLDR; Automated Tongue Image Segmentation using De-Net
Abstract Slides Poster Similar
Automatic Semantic Segmentation of Structural Elements related to the Spinal Cord in the Lumbar Region by Using Convolutional Neural Networks
Jhon Jairo Sáenz Gamboa, Maria De La Iglesia-Vaya, Jon Ander Gómez
Auto-TLDR; Semantic Segmentation of Lumbar Spine Using Convolutional Neural Networks
Abstract Slides Poster Similar
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
GazeMAE: General Representations of Eye Movements Using a Micro-Macro Autoencoder
Louise Gillian C. Bautista, Prospero Naval
Auto-TLDR; Fast and Slow Eye Movement Representations for Sentiment-agnostic Eye Tracking
Abstract Slides Poster Similar
RescueNet: Joint Building Segmentation and Damage Assessment from Satellite Imagery
Auto-TLDR; RescueNet: End-to-End Building Segmentation and Damage Classification for Humanitarian Aid and Disaster Response
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
Uncertainty Guided Recognition of Tiny Craters on the Moon
Thorsten Wilhelm, Christian Wöhler

Auto-TLDR; Accurately Detecting Tiny Craters in Remote Sensed Images Using Deep Neural Networks
Abstract Slides Poster Similar
Street-Map Based Validation of Semantic Segmentation in Autonomous Driving
Laura Von Rueden, Tim Wirtz, Fabian Hueger, Jan David Schneider, Nico Piatkowski, Christian Bauckhage

Auto-TLDR; Semantic Segmentation Mask Validation Using A-priori Knowledge from Street Maps
Abstract Slides Poster Similar
A Comparison of Neural Network Approaches for Melanoma Classification
Maria Frasca, Michele Nappi, Michele Risi, Genoveffa Tortora, Alessia Auriemma Citarella
Auto-TLDR; Classification of Melanoma Using Deep Neural Network Methodologies
Abstract Slides Poster Similar
FastSal: A Computationally Efficient Network for Visual Saliency Prediction
Auto-TLDR; MobileNetV2: A Convolutional Neural Network for Saliency Prediction
Abstract Slides Poster Similar
Planar 3D Transfer Learning for End to End Unimodal MRI Unbalanced Data Segmentation
Martin Kolarik, Radim Burget, Carlos M. Travieso-Gonzalez, Jan Kocica
Auto-TLDR; Planar 3D Res-U-Net Network for Unbalanced 3D Image Segmentation using Fluid Attenuation Inversion Recover
A Lumen Segmentation Method in Ureteroscopy Images Based on a Deep Residual U-Net Architecture
Jorge Lazo, Marzullo Aldo, Sara Moccia, Michele Catellani, Benoit Rosa, Elena De Momi, Michel De Mathelin, Francesco Calimeri
Auto-TLDR; A Deep Neural Network for Ureteroscopy with Residual Units
Abstract Slides Poster Similar
A Versatile Crack Inspection Portable System Based on Classifier Ensemble and Controlled Illumination
Milind Gajanan Padalkar, Carlos Beltran-Gonzalez, Matteo Bustreo, Alessio Del Bue, Vittorio Murino
Auto-TLDR; Lighting Conditions for Crack Detection in Ceramic Tile
Abstract Slides Poster Similar
Thermal Image Enhancement Using Generative Adversarial Network for Pedestrian Detection
Mohamed Amine Marnissi, Hajer Fradi, Anis Sahbani, Najoua Essoukri Ben Amara
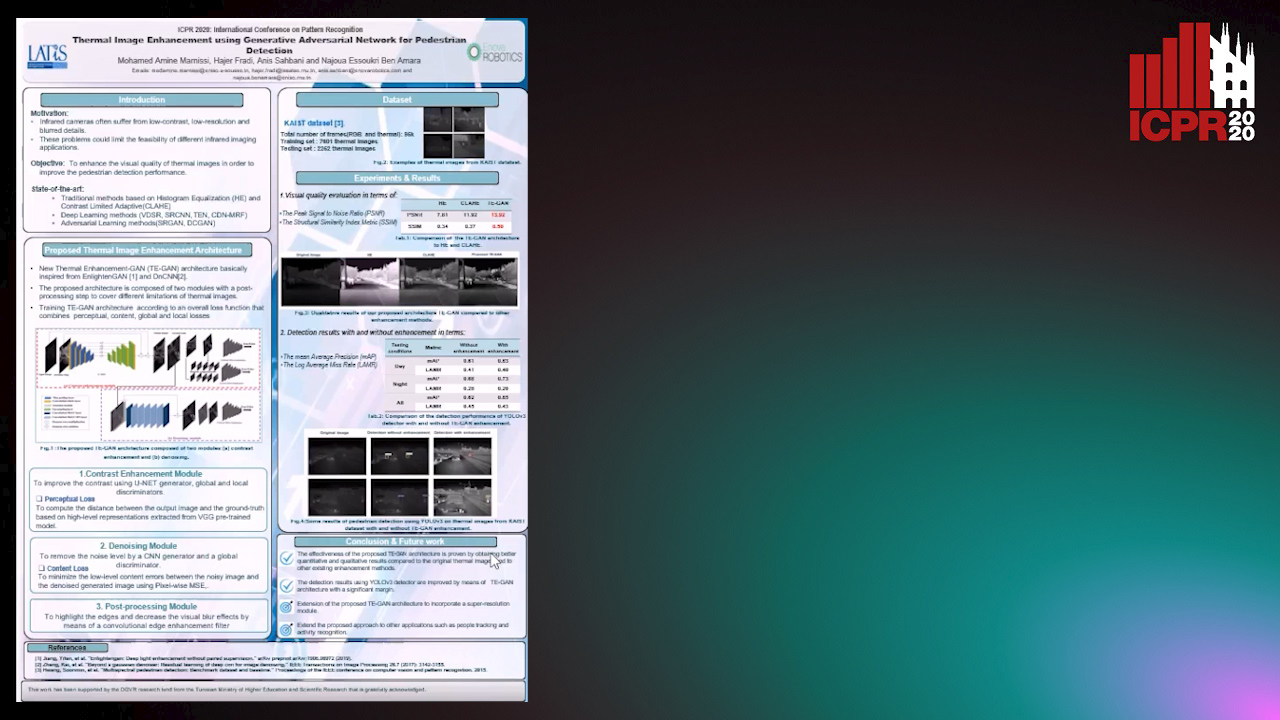
Auto-TLDR; Improving Visual Quality of Infrared Images for Pedestrian Detection Using Generative Adversarial Network
Abstract Slides Poster Similar
Learning to Segment Clustered Amoeboid Cells from Brightfield Microscopy Via Multi-Task Learning with Adaptive Weight Selection
Rituparna Sarkar, Suvadip Mukherjee, Elisabeth Labruyere, Jean-Christophe Olivo-Marin
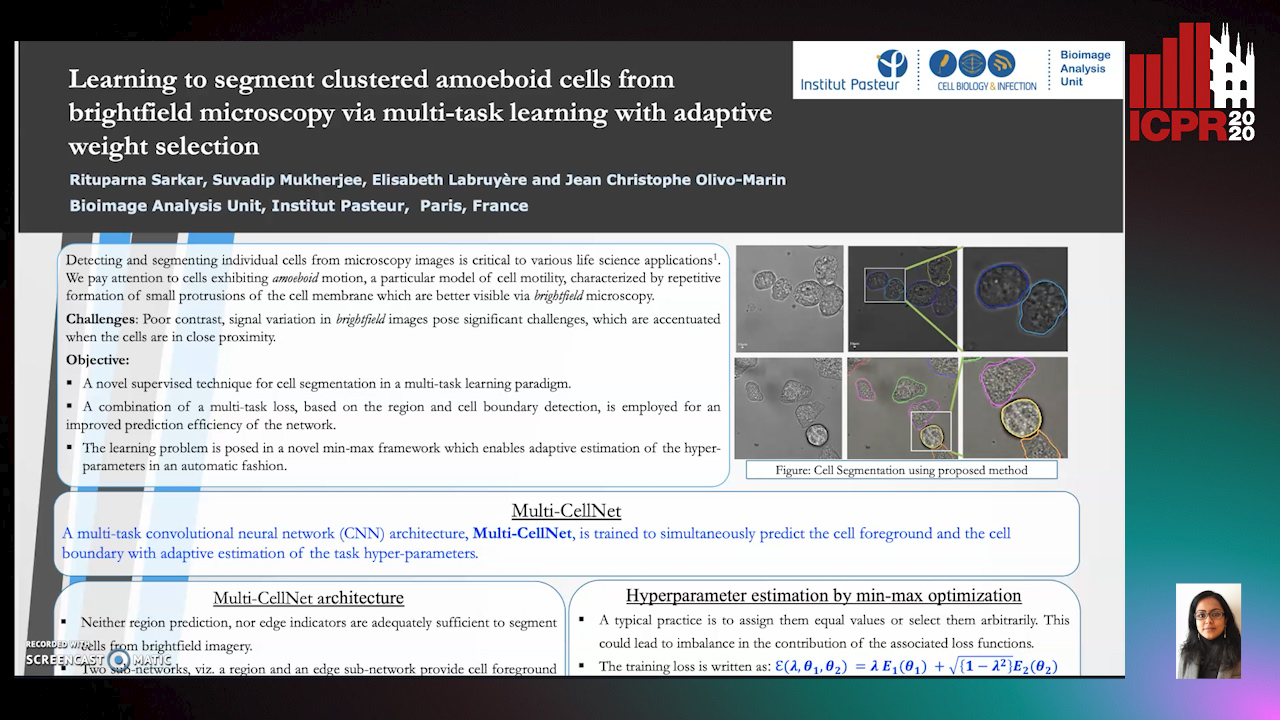
Auto-TLDR; Supervised Cell Segmentation from Microscopy Images using Multi-task Learning in a Multi-Task Learning Paradigm
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Triplet-Path Dilated Network for Detection and Segmentation of General Pathological Images
Jiaqi Luo, Zhicheng Zhao, Fei Su, Limei Guo
Auto-TLDR; Triplet-path Network for One-Stage Object Detection and Segmentation in Pathological Images
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar
Inner Eye Canthus Localization for Human Body Temperature Screening
Claudio Ferrari, Lorenzo Berlincioni, Marco Bertini, Alberto Del Bimbo
Auto-TLDR; Automatic Localization of the Inner Eye Canthus in Thermal Face Images using 3D Morphable Face Model
Abstract Slides Poster Similar
Radar Image Reconstruction from Raw ADC Data Using Parametric Variational Autoencoder with Domain Adaptation
Michael Stephan, Thomas Stadelmayer, Avik Santra, Georg Fischer, Robert Weigel, Fabian Lurz
Auto-TLDR; Parametric Variational Autoencoder-based Human Target Detection and Localization for Frequency Modulated Continuous Wave Radar
Abstract Slides Poster Similar
RefiNet: 3D Human Pose Refinement with Depth Maps
Andrea D'Eusanio, Stefano Pini, Guido Borghi, Roberto Vezzani, Rita Cucchiara

Auto-TLDR; RefiNet: A Multi-stage Framework for 3D Human Pose Estimation
Motion U-Net: Multi-Cue Encoder-Decoder Network for Motion Segmentation
Gani Rahmon, Filiz Bunyak, Kannappan Palaniappan

Auto-TLDR; Motion U-Net: A Deep Learning Framework for Robust Moving Object Detection under Challenging Conditions
Abstract Slides Poster Similar
Exposing Deepfake Videos by Tracking Eye Movements
Meng Li, Beibei Liu, Yujiang Hu, Yufei Wang

Auto-TLDR; A Novel Approach to Detecting Deepfake Videos
Abstract Slides Poster Similar
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
Aerial Road Segmentation in the Presence of Topological Label Noise
Corentin Henry, Friedrich Fraundorfer, Eleonora Vig
Auto-TLDR; Improving Road Segmentation with Noise-Aware U-Nets for Fine-Grained Topology delineation
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
Real Time Fencing Move Classification and Detection at Touch Time During a Fencing Match
Cem Ekin Sunal, Chris G. Willcocks, Boguslaw Obara

Auto-TLDR; Fencing Body Move Classification and Detection Using Deep Learning
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
FOANet: A Focus of Attention Network with Application to Myocardium Segmentation
Zhou Zhao, Elodie Puybareau, Nicolas Boutry, Thierry Geraud
Auto-TLDR; FOANet: A Hybrid Loss Function for Myocardium Segmentation of Cardiac Magnetic Resonance Images
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Facial Expression Recognition Using Residual Masking Network
Luan Pham, Vu Huynh, Tuan Anh Tran
Auto-TLDR; Deep Residual Masking for Automatic Facial Expression Recognition
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Detecting Manipulated Facial Videos: A Time Series Solution
Zhang Zhewei, Ma Can, Gao Meilin, Ding Bowen
Auto-TLDR; Face-Alignment Based Bi-LSTM for Fake Video Detection
Abstract Slides Poster Similar