Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu,
Wei-Chen Chiu,
Hua-Tsung Chen,
Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Similar papers
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Delivering Meaningful Representation for Monocular Depth Estimation
Doyeon Kim, Donggyu Joo, Junmo Kim

Auto-TLDR; Monocular Depth Estimation by Bridging the Context between Encoding and Decoding
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
FastCompletion: A Cascade Network with Multiscale Group-Fused Inputs for Real-Time Depth Completion
Ang Li, Zejian Yuan, Yonggen Ling, Wanchao Chi, Shenghao Zhang, Chong Zhang
Auto-TLDR; Efficient Depth Completion with Clustered Hourglass Networks
Abstract Slides Poster Similar
Dynamic Guided Network for Monocular Depth Estimation
Xiaoxia Xing, Yinghao Cai, Yiping Yang, Dayong Wen

Auto-TLDR; DGNet: Dynamic Guidance Upsampling for Self-attention-Decoding for Monocular Depth Estimation
Abstract Slides Poster Similar
Ordinal Depth Classification Using Region-Based Self-Attention
Minh Hieu Phan, Son Lam Phung, Abdesselam Bouzerdoum

Auto-TLDR; Region-based Self-Attention for Multi-scale Depth Estimation from a Single 2D Image
Abstract Slides Poster Similar
DEN: Disentangling and Exchanging Network for Depth Completion
You-Feng Wu, Vu-Hoang Tran, Ting-Wei Chang, Wei-Chen Chiu, Ching-Chun Huang
Auto-TLDR; Disentangling and Exchanging Network for Depth Completion
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Learning Stereo Matchability in Disparity Regression Networks
Jingyang Zhang, Yao Yao, Zixin Luo, Shiwei Li, Tianwei Shen, Tian Fang, Long Quan
Auto-TLDR; Deep Stereo Matchability for Weakly Matchable Regions
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
Fast and Efficient Neural Network for Light Field Disparity Estimation
Auto-TLDR; Improving Efficient Light Field Disparity Estimation Using Deep Neural Networks
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Leveraging a Weakly Adversarial Paradigm for Joint Learning of Disparity and Confidence Estimation
Matteo Poggi, Fabio Tosi, Filippo Aleotti, Stefano Mattoccia

Auto-TLDR; Joint Training of Deep-Networks for Outlier Detection from Stereo Images
Abstract Slides Poster Similar
Attention Stereo Matching Network
Doudou Zhang, Jing Cai, Yanbing Xue, Zan Gao, Hua Zhang

Auto-TLDR; ASM-Net: Attention Stereo Matching with Disparity Refinement
Abstract Slides Poster Similar
Deeply-Fused Attentive Network for Stereo Matching
Zuliu Yang, Xindong Ai, Weida Yang, Yong Zhao, Qifei Dai, Fuchi Li

Auto-TLDR; DF-Net: Deep Learning-based Network for Stereo Matching
Abstract Slides Poster Similar
5D Light Field Synthesis from a Monocular Video
Kyuho Bae, Andre Ivan, Hajime Nagahara, In Kyu Park

Auto-TLDR; Synthesis of Light Field Video from Monocular Video using Deep Learning
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
FastSal: A Computationally Efficient Network for Visual Saliency Prediction
Auto-TLDR; MobileNetV2: A Convolutional Neural Network for Saliency Prediction
Abstract Slides Poster Similar
Transitional Asymmetric Non-Local Neural Networks for Real-World Dirt Road Segmentation

Auto-TLDR; Transitional Asymmetric Non-Local Neural Networks for Semantic Segmentation on Dirt Roads
Abstract Slides Poster Similar
Object Detection on Monocular Images with Two-Dimensional Canonical Correlation Analysis

Auto-TLDR; Multi-Task Object Detection from Monocular Images Using Multimodal RGB and Depth Data
Abstract Slides Poster Similar
Towards Efficient 3D Point Cloud Scene Completion Via Novel Depth View Synthesis
Haiyan Wang, Liang Yang, Xuejian Rong, Ying-Li Tian

Auto-TLDR; 3D Point Cloud Completion with Depth View Synthesis and Depth View synthesis
Suppressing Features That Contain Disparity Edge for Stereo Matching
Xindong Ai, Zuliu Yang, Weida Yang, Yong Zhao, Zhengzhong Yu, Fuchi Li
Auto-TLDR; SDE-Attention: A Novel Attention Mechanism for Stereo Matching
Abstract Slides Poster Similar
Edge-Aware Monocular Dense Depth Estimation with Morphology
Zhi Li, Xiaoyang Zhu, Haitao Yu, Qi Zhang, Yongshi Jiang

Auto-TLDR; Spatio-Temporally Smooth Dense Depth Maps Using Only a CPU
Abstract Slides Poster Similar
Fast and Accurate Real-Time Semantic Segmentation with Dilated Asymmetric Convolutions
Leonel Rosas-Arias, Gibran Benitez-Garcia, Jose Portillo-Portillo, Gabriel Sanchez-Perez, Keiji Yanai

Auto-TLDR; FASSD-Net: Dilated Asymmetric Pyramidal Fusion for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
ResFPN: Residual Skip Connections in Multi-Resolution Feature Pyramid Networks for Accurate Dense Pixel Matching
Rishav ., René Schuster, Ramy Battrawy, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Resolution Feature Pyramid Networks for Dense Pixel Matching
Human Segmentation with Dynamic LiDAR Data
Tao Zhong, Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi

Auto-TLDR; Spatiotemporal Neural Network for Human Segmentation with Dynamic Point Clouds
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar
Feature Point Matching in Cross-Spectral Images with Cycle Consistency Learning
Ryosuke Furuta, Naoaki Noguchi, Xueting Wang, Toshihiko Yamasaki
Auto-TLDR; Unsupervised Learning for General Feature Point Matching in Cross-Spectral Settings
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
Enhancing Depth Quality of Stereo Vision Using Deep Learning-Based Prior Information of the Driving Environment
Weifu Li, Vijay John, Seiichi Mita
Auto-TLDR; A Novel Post-processing Mathematical Framework for Stereo Vision
Abstract Slides Poster Similar
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
Real-Time Semantic Segmentation Via Region and Pixel Context Network
Yajun Li, Yazhou Liu, Quansen Sun
Auto-TLDR; A Dual Context Network for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Boosting High-Level Vision with Joint Compression Artifacts Reduction and Super-Resolution
Xiaoyu Xiang, Qian Lin, Jan Allebach
Auto-TLDR; A Context-Aware Joint CAR and SR Neural Network for High-Resolution Text Recognition and Face Detection
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
Encoder-Decoder Based Convolutional Neural Networks with Multi-Scale-Aware Modules for Crowd Counting
Pongpisit Thanasutives, Ken-Ichi Fukui, Masayuki Numao, Boonserm Kijsirikul
Auto-TLDR; M-SFANet and M-SegNet for Crowd Counting Using Multi-Scale Fusion Networks
Abstract Slides Poster Similar
PSDNet: A Balanced Architecture of Accuracy and Parameters for Semantic Segmentation

Auto-TLDR; Pyramid Pooling Module with SE1Cblock and D2SUpsample Network (PSDNet)
Abstract Slides Poster Similar
Coarse to Fine: Progressive and Multi-Task Learning for Salient Object Detection
Dong-Goo Kang, Sangwoo Park, Joonki Paik
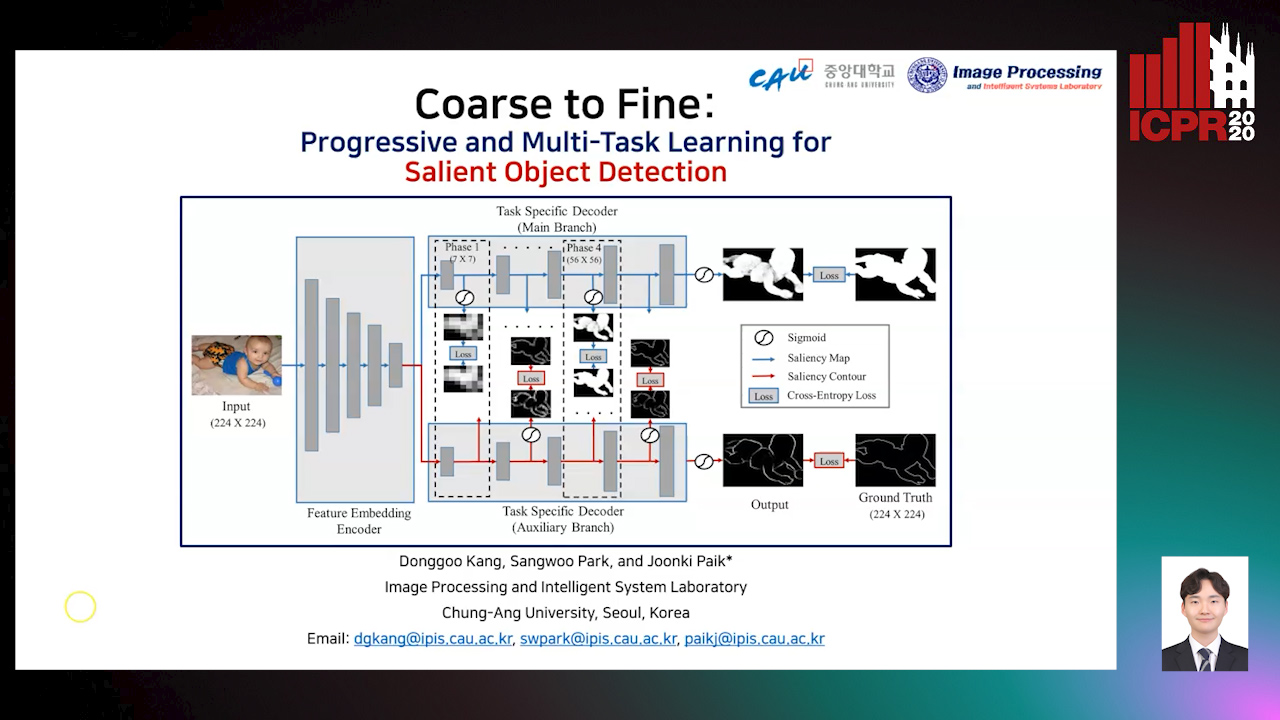
Auto-TLDR; Progressive and mutl-task learning scheme for salient object detection
Abstract Slides Poster Similar
Object Segmentation Tracking from Generic Video Cues
Amirhossein Kardoost, Sabine Müller, Joachim Weickert, Margret Keuper

Auto-TLDR; A Light-Weight Variational Framework for Video Object Segmentation in Videos
Abstract Slides Poster Similar
STaRFlow: A SpatioTemporal Recurrent Cell for Lightweight Multi-Frame Optical Flow Estimation
Pierre Godet, Alexandre Boulch, Aurélien Plyer, Guy Le Besnerais
Auto-TLDR; STaRFlow: A lightweight CNN-based algorithm for optical flow estimation
Abstract Slides Poster Similar
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
Boundary-Aware Graph Convolution for Semantic Segmentation
Hanzhe Hu, Jinshi Cui, Jinshi Hongbin Zha

Auto-TLDR; Boundary-Aware Graph Convolution for Semantic Segmentation
Abstract Slides Poster Similar
EdgeNet: Semantic Scene Completion from a Single RGB-D Image
Aloisio Dourado, Teofilo De Campos, Adrian Hilton, Hansung Kim

Auto-TLDR; Semantic Scene Completion using 3D Depth and RGB Information
Abstract Slides Poster Similar
Joint Face Alignment and 3D Face Reconstruction with Efficient Convolution Neural Networks
Keqiang Li, Huaiyu Wu, Xiuqin Shang, Zhen Shen, Gang Xiong, Xisong Dong, Bin Hu, Fei-Yue Wang
Auto-TLDR; Mobile-FRNet: Efficient 3D Morphable Model Alignment and 3D Face Reconstruction from a Single 2D Facial Image
Abstract Slides Poster Similar
The Aleatoric Uncertainty Estimation Using a Separate Formulation with Virtual Residuals
Takumi Kawashima, Qing Yu, Akari Asai, Daiki Ikami, Kiyoharu Aizawa
Auto-TLDR; Aleatoric Uncertainty Estimation in Regression Problems