Fast and Efficient Neural Network for Light Field Disparity Estimation
Auto-TLDR; Improving Efficient Light Field Disparity Estimation Using Deep Neural Networks
Similar papers
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Cost Volume Refinement for Depth Prediction
João L. Cardoso, Nuno Goncalves, Michael Wimmer

Auto-TLDR; Refining the Cost Volume for Depth Prediction from Light Field Cameras
Abstract Slides Poster Similar
5D Light Field Synthesis from a Monocular Video
Kyuho Bae, Andre Ivan, Hajime Nagahara, In Kyu Park

Auto-TLDR; Synthesis of Light Field Video from Monocular Video using Deep Learning
A Novel Deep-Learning Pipeline for Light Field Image Based Material Recognition
Yunlong Wang, Kunbo Zhang, Zhenan Sun
Auto-TLDR; Factorize-Connect-Merge Deep Learning Pipeline for Light Field Image Based Material Recognition
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Delivering Meaningful Representation for Monocular Depth Estimation
Doyeon Kim, Donggyu Joo, Junmo Kim

Auto-TLDR; Monocular Depth Estimation by Bridging the Context between Encoding and Decoding
Abstract Slides Poster Similar
Slimming ResNet by Slimming Shortcut
Donggyu Joo, Doyeon Kim, Junmo Kim
Auto-TLDR; SSPruning: Slimming Shortcut Pruning on ResNet Based Networks
Abstract Slides Poster Similar
VPU Specific CNNs through Neural Architecture Search
Ciarán Donegan, Hamza Yous, Saksham Sinha, Jonathan Byrne
Auto-TLDR; Efficient Convolutional Neural Networks for Edge Devices using Neural Architecture Search
Abstract Slides Poster Similar
Fast and Accurate Real-Time Semantic Segmentation with Dilated Asymmetric Convolutions
Leonel Rosas-Arias, Gibran Benitez-Garcia, Jose Portillo-Portillo, Gabriel Sanchez-Perez, Keiji Yanai

Auto-TLDR; FASSD-Net: Dilated Asymmetric Pyramidal Fusion for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Efficient-Receptive Field Block with Group Spatial Attention Mechanism for Object Detection
Jiacheng Zhang, Zhicheng Zhao, Fei Su
Auto-TLDR; E-RFB: Efficient-Receptive Field Block for Deep Neural Network for Object Detection
Abstract Slides Poster Similar
Transitional Asymmetric Non-Local Neural Networks for Real-World Dirt Road Segmentation

Auto-TLDR; Transitional Asymmetric Non-Local Neural Networks for Semantic Segmentation on Dirt Roads
Abstract Slides Poster Similar
LiNet: A Lightweight Network for Image Super Resolution
Armin Mehri, Parichehr Behjati Ardakani, Angel D. Sappa
Auto-TLDR; LiNet: A Compact Dense Network for Lightweight Super Resolution
Abstract Slides Poster Similar
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
Dynamic Multi-Path Neural Network
Yingcheng Su, Yichao Wu, Ken Chen, Ding Liang, Xiaolin Hu

Auto-TLDR; Dynamic Multi-path Neural Network
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
FastSal: A Computationally Efficient Network for Visual Saliency Prediction
Auto-TLDR; MobileNetV2: A Convolutional Neural Network for Saliency Prediction
Abstract Slides Poster Similar
Attention Based Pruning for Shift Networks
Ghouthi Hacene, Carlos Lassance, Vincent Gripon, Matthieu Courbariaux, Yoshua Bengio
Auto-TLDR; Shift Attention Layers for Efficient Convolutional Layers
Abstract Slides Poster Similar
ResFPN: Residual Skip Connections in Multi-Resolution Feature Pyramid Networks for Accurate Dense Pixel Matching
Rishav ., René Schuster, Ramy Battrawy, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Resolution Feature Pyramid Networks for Dense Pixel Matching
Suppressing Features That Contain Disparity Edge for Stereo Matching
Xindong Ai, Zuliu Yang, Weida Yang, Yong Zhao, Zhengzhong Yu, Fuchi Li
Auto-TLDR; SDE-Attention: A Novel Attention Mechanism for Stereo Matching
Abstract Slides Poster Similar
E-DNAS: Differentiable Neural Architecture Search for Embedded Systems
Javier García López, Antonio Agudo, Francesc Moreno-Noguer
Auto-TLDR; E-DNAS: Differentiable Architecture Search for Light-Weight Networks for Image Classification
Abstract Slides Poster Similar
Deeply-Fused Attentive Network for Stereo Matching
Zuliu Yang, Xindong Ai, Weida Yang, Yong Zhao, Qifei Dai, Fuchi Li

Auto-TLDR; DF-Net: Deep Learning-based Network for Stereo Matching
Abstract Slides Poster Similar
Improved Residual Networks for Image and Video Recognition
Ionut Cosmin Duta, Li Liu, Fan Zhu, Ling Shao
Auto-TLDR; Residual Networks for Deep Learning
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Boosting High-Level Vision with Joint Compression Artifacts Reduction and Super-Resolution
Xiaoyu Xiang, Qian Lin, Jan Allebach
Auto-TLDR; A Context-Aware Joint CAR and SR Neural Network for High-Resolution Text Recognition and Face Detection
Abstract Slides Poster Similar
Efficient Super Resolution by Recursive Aggregation
Zhengxiong Luo Zhengxiong Luo, Yan Huang, Shang Li, Liang Wang, Tieniu Tan
Auto-TLDR; Recursive Aggregation Network for Efficient Deep Super Resolution
Abstract Slides Poster Similar
CQNN: Convolutional Quadratic Neural Networks
Auto-TLDR; Quadratic Neural Network for Image Classification
Abstract Slides Poster Similar
Dynamic Guided Network for Monocular Depth Estimation
Xiaoxia Xing, Yinghao Cai, Yiping Yang, Dayong Wen

Auto-TLDR; DGNet: Dynamic Guidance Upsampling for Self-attention-Decoding for Monocular Depth Estimation
Abstract Slides Poster Similar
Joint Face Alignment and 3D Face Reconstruction with Efficient Convolution Neural Networks
Keqiang Li, Huaiyu Wu, Xiuqin Shang, Zhen Shen, Gang Xiong, Xisong Dong, Bin Hu, Fei-Yue Wang
Auto-TLDR; Mobile-FRNet: Efficient 3D Morphable Model Alignment and 3D Face Reconstruction from a Single 2D Facial Image
Abstract Slides Poster Similar
FastCompletion: A Cascade Network with Multiscale Group-Fused Inputs for Real-Time Depth Completion
Ang Li, Zejian Yuan, Yonggen Ling, Wanchao Chi, Shenghao Zhang, Chong Zhang
Auto-TLDR; Efficient Depth Completion with Clustered Hourglass Networks
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Context-Aware Residual Module for Image Classification
Auto-TLDR; Context-Aware Residual Module for Image Classification
Abstract Slides Poster Similar
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
PSDNet: A Balanced Architecture of Accuracy and Parameters for Semantic Segmentation

Auto-TLDR; Pyramid Pooling Module with SE1Cblock and D2SUpsample Network (PSDNet)
Abstract Slides Poster Similar
Adaptive Image Compression Using GAN Based Semantic-Perceptual Residual Compensation
Ruojing Wang, Zitang Sun, Sei-Ichiro Kamata, Weili Chen
Auto-TLDR; Adaptive Image Compression using GAN based Semantic-Perceptual Residual Compensation
Abstract Slides Poster Similar
On the Information of Feature Maps and Pruning of Deep Neural Networks
Mohammadreza Soltani, Suya Wu, Jie Ding, Robert Ravier, Vahid Tarokh
Auto-TLDR; Compressing Deep Neural Models Using Mutual Information
Abstract Slides Poster Similar
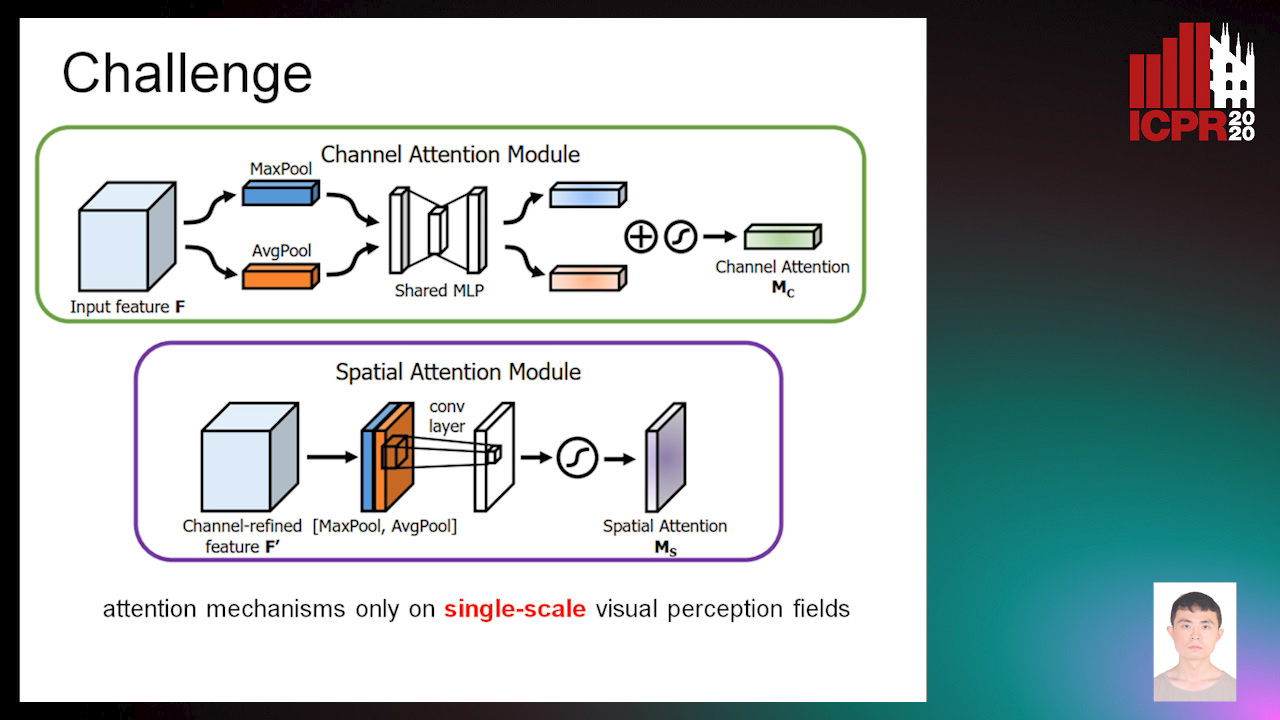
Attention Pyramid Module for Scene Recognition
Zhinan Qiao, Xiaohui Yuan, Chengyuan Zhuang, Abolfazl Meyarian
Auto-TLDR; Attention Pyramid Module for Multi-Scale Scene Recognition
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Attention As Activation
Yimian Dai, Stefan Oehmcke, Fabian Gieseke, Yiquan Wu, Kobus Barnard
Auto-TLDR; Attentional Activation Units for Convolutional Networks
Two-Level Attention-Based Fusion Learning for RGB-D Face Recognition
Hardik Uppal, Alireza Sepas-Moghaddam, Michael Greenspan, Ali Etemad
Auto-TLDR; Fused RGB-D Facial Recognition using Attention-Aware Feature Fusion
Abstract Slides Poster Similar
Operation and Topology Aware Fast Differentiable Architecture Search
Shahid Siddiqui, Christos Kyrkou, Theocharis Theocharides
Auto-TLDR; EDARTS: Efficient Differentiable Architecture Search with Efficient Optimization
Abstract Slides Poster Similar
Encoder-Decoder Based Convolutional Neural Networks with Multi-Scale-Aware Modules for Crowd Counting
Pongpisit Thanasutives, Ken-Ichi Fukui, Masayuki Numao, Boonserm Kijsirikul
Auto-TLDR; M-SFANet and M-SegNet for Crowd Counting Using Multi-Scale Fusion Networks
Abstract Slides Poster Similar
Attention Stereo Matching Network
Doudou Zhang, Jing Cai, Yanbing Xue, Zan Gao, Hua Zhang

Auto-TLDR; ASM-Net: Attention Stereo Matching with Disparity Refinement
Abstract Slides Poster Similar
Spatial-Related and Scale-Aware Network for Crowd Counting
Lei Li, Yuan Dong, Hongliang Bai
Auto-TLDR; Spatial Attention for Crowd Counting
Abstract Slides Poster Similar
Progressive Splitting and Upscaling Structure for Super-Resolution
Auto-TLDR; PSUS: Progressive and Upscaling Layer for Single Image Super-Resolution
Abstract Slides Poster Similar
Wavelet Attention Embedding Networks for Video Super-Resolution
Young-Ju Choi, Young-Woon Lee, Byung-Gyu Kim
Auto-TLDR; Wavelet Attention Embedding Network for Video Super-Resolution
Abstract Slides Poster Similar
Hierarchically Aggregated Residual Transformation for Single Image Super Resolution
Auto-TLDR; HARTnet: Hierarchically Aggregated Residual Transformation for Multi-Scale Super-resolution
Abstract Slides Poster Similar
Leveraging a Weakly Adversarial Paradigm for Joint Learning of Disparity and Confidence Estimation
Matteo Poggi, Fabio Tosi, Filippo Aleotti, Stefano Mattoccia

Auto-TLDR; Joint Training of Deep-Networks for Outlier Detection from Stereo Images
Abstract Slides Poster Similar