Leveraging a Weakly Adversarial Paradigm for Joint Learning of Disparity and Confidence Estimation
Matteo Poggi,
Fabio Tosi,
Filippo Aleotti,
Stefano Mattoccia

Auto-TLDR; Joint Training of Deep-Networks for Outlier Detection from Stereo Images
Similar papers
Learning Stereo Matchability in Disparity Regression Networks
Jingyang Zhang, Yao Yao, Zixin Luo, Shiwei Li, Tianwei Shen, Tian Fang, Long Quan
Auto-TLDR; Deep Stereo Matchability for Weakly Matchable Regions
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
Deeply-Fused Attentive Network for Stereo Matching
Zuliu Yang, Xindong Ai, Weida Yang, Yong Zhao, Qifei Dai, Fuchi Li

Auto-TLDR; DF-Net: Deep Learning-based Network for Stereo Matching
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Suppressing Features That Contain Disparity Edge for Stereo Matching
Xindong Ai, Zuliu Yang, Weida Yang, Yong Zhao, Zhengzhong Yu, Fuchi Li
Auto-TLDR; SDE-Attention: A Novel Attention Mechanism for Stereo Matching
Abstract Slides Poster Similar
Attention Stereo Matching Network
Doudou Zhang, Jing Cai, Yanbing Xue, Zan Gao, Hua Zhang

Auto-TLDR; ASM-Net: Attention Stereo Matching with Disparity Refinement
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
ResFPN: Residual Skip Connections in Multi-Resolution Feature Pyramid Networks for Accurate Dense Pixel Matching
Rishav ., René Schuster, Ramy Battrawy, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Resolution Feature Pyramid Networks for Dense Pixel Matching
Domain Siamese CNNs for Sparse Multispectral Disparity Estimation
David-Alexandre Beaupre, Guillaume-Alexandre Bilodeau

Auto-TLDR; Multispectral Disparity Estimation between Thermal and Visible Images using Deep Neural Networks
Abstract Slides Poster Similar
STaRFlow: A SpatioTemporal Recurrent Cell for Lightweight Multi-Frame Optical Flow Estimation
Pierre Godet, Alexandre Boulch, Aurélien Plyer, Guy Le Besnerais
Auto-TLDR; STaRFlow: A lightweight CNN-based algorithm for optical flow estimation
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
HMFlow: Hybrid Matching Optical Flow Network for Small and Fast-Moving Objects
Suihanjin Yu, Youmin Zhang, Chen Wang, Xiao Bai, Liang Zhang, Edwin Hancock
Auto-TLDR; Hybrid Matching Optical Flow Network with Global Matching Component
Abstract Slides Poster Similar
Efficient Shadow Detection and Removal Using Synthetic Data with Domain Adaptation
Rui Guo, Babajide Ayinde, Hao Sun
Auto-TLDR; Shadow Detection and Removal with Domain Adaptation and Synthetic Image Database
Feature Point Matching in Cross-Spectral Images with Cycle Consistency Learning
Ryosuke Furuta, Naoaki Noguchi, Xueting Wang, Toshihiko Yamasaki
Auto-TLDR; Unsupervised Learning for General Feature Point Matching in Cross-Spectral Settings
Abstract Slides Poster Similar
DeepBEV: A Conditional Adversarial Network for Bird’s Eye View Generation
Auto-TLDR; A Generative Adversarial Network for Semantic Object Representation in Autonomous Vehicles
Abstract Slides Poster Similar
Shape Consistent 2D Keypoint Estimation under Domain Shift
Levi Vasconcelos, Massimiliano Mancini, Davide Boscaini, Barbara Caputo, Elisa Ricci

Auto-TLDR; Deep Adaptation for Keypoint Prediction under Domain Shift
Abstract Slides Poster Similar
Can You Trust Your Pose? Confidence Estimation in Visual Localization
Luca Ferranti, Xiaotian Li, Jani Boutellier, Juho Kannala

Auto-TLDR; Pose Confidence Estimation in Large-Scale Environments: A Light-weight Approach to Improving Pose Estimation Pipeline
Abstract Slides Poster Similar
Local Facial Attribute Transfer through Inpainting
Ricard Durall, Franz-Josef Pfreundt, Janis Keuper
Auto-TLDR; Attribute Transfer Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Machine-Learned Regularization and Polygonization of Building Segmentation Masks
Stefano Zorzi, Ksenia Bittner, Friedrich Fraundorfer

Auto-TLDR; Automatic Regularization and Polygonization of Building Segmentation masks using Generative Adversarial Network
Abstract Slides Poster Similar
Delivering Meaningful Representation for Monocular Depth Estimation
Doyeon Kim, Donggyu Joo, Junmo Kim

Auto-TLDR; Monocular Depth Estimation by Bridging the Context between Encoding and Decoding
Abstract Slides Poster Similar
Self-Supervised Joint Encoding of Motion and Appearance for First Person Action Recognition
Mirco Planamente, Andrea Bottino, Barbara Caputo

Auto-TLDR; A Single Stream Architecture for Egocentric Action Recognition from the First-Person Point of View
Abstract Slides Poster Similar
Foreground-Focused Domain Adaption for Object Detection
Auto-TLDR; Unsupervised Domain Adaptation for Unsupervised Object Detection
Enhancing Depth Quality of Stereo Vision Using Deep Learning-Based Prior Information of the Driving Environment
Weifu Li, Vijay John, Seiichi Mita
Auto-TLDR; A Novel Post-processing Mathematical Framework for Stereo Vision
Abstract Slides Poster Similar
Unsupervised Domain Adaptation with Multiple Domain Discriminators and Adaptive Self-Training
Teo Spadotto, Marco Toldo, Umberto Michieli, Pietro Zanuttigh

Auto-TLDR; Unsupervised Domain Adaptation for Semantic Segmentation of Urban Scenes
Abstract Slides Poster Similar
JUMPS: Joints Upsampling Method for Pose Sequences
Lucas Mourot, Francois Le Clerc, Cédric Thébault, Pierre Hellier
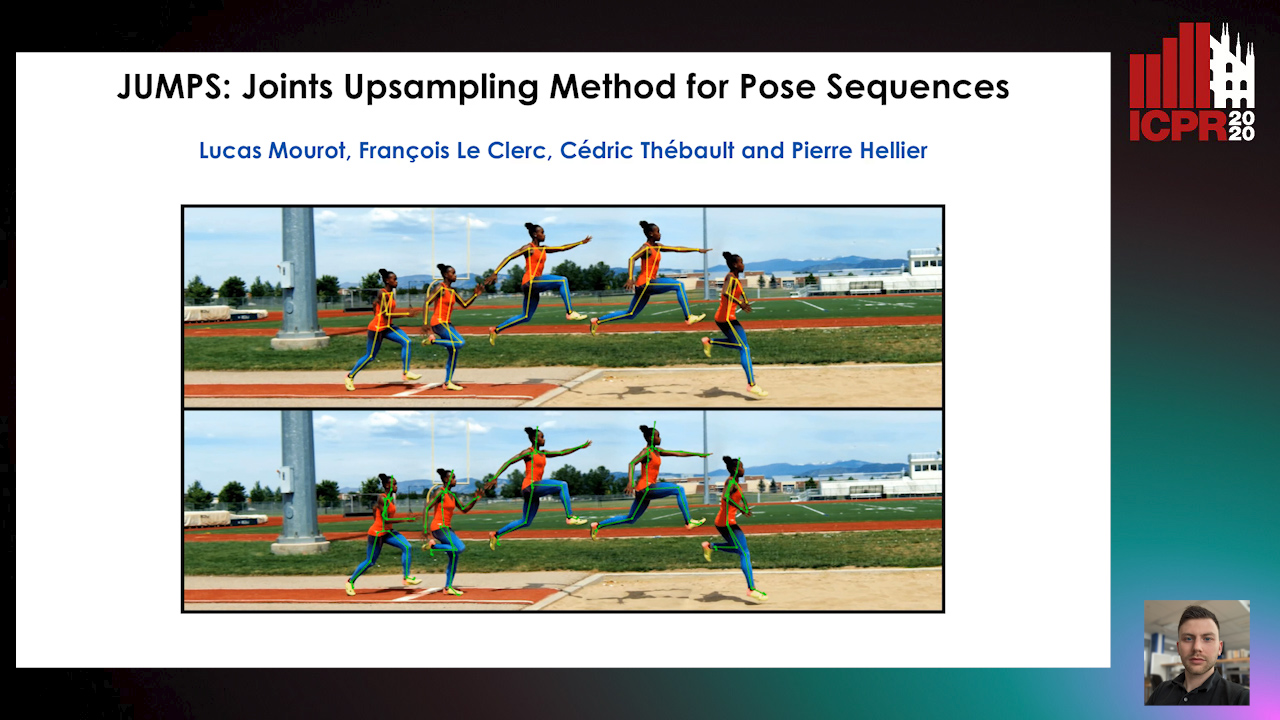
Auto-TLDR; JUMPS: Increasing the Number of Joints in 2D Pose Estimation and Recovering Occluded or Missing Joints
Abstract Slides Poster Similar
Combining GANs and AutoEncoders for Efficient Anomaly Detection
Fabio Carrara, Giuseppe Amato, Luca Brombin, Fabrizio Falchi, Claudio Gennaro
Auto-TLDR; CBIGAN: Anomaly Detection in Images with Consistency Constrained BiGAN
Abstract Slides Poster Similar
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Unsupervised 3D Human Pose Estimation in Multi-view-multi-pose Video
Cheng Sun, Diego Thomas, Hiroshi Kawasaki
Auto-TLDR; Unsupervised 3D Human Pose Estimation from 2D Videos Using Generative Adversarial Network
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
FastCompletion: A Cascade Network with Multiscale Group-Fused Inputs for Real-Time Depth Completion
Ang Li, Zejian Yuan, Yonggen Ling, Wanchao Chi, Shenghao Zhang, Chong Zhang
Auto-TLDR; Efficient Depth Completion with Clustered Hourglass Networks
Abstract Slides Poster Similar
SECI-GAN: Semantic and Edge Completion for Dynamic Objects Removal
Francesco Pinto, Andrea Romanoni, Matteo Matteucci, Phil Torr
Auto-TLDR; SECI-GAN: Semantic and Edge Conditioned Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
Object Segmentation Tracking from Generic Video Cues
Amirhossein Kardoost, Sabine Müller, Joachim Weickert, Margret Keuper

Auto-TLDR; A Light-Weight Variational Framework for Video Object Segmentation in Videos
Abstract Slides Poster Similar
Uncertainty-Sensitive Activity Recognition: A Reliability Benchmark and the CARING Models
Alina Roitberg, Monica Haurilet, Manuel Martinez, Rainer Stiefelhagen
Auto-TLDR; CARING: Calibrated Action Recognition with Input Guidance
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
GAP: Quantifying the Generative Adversarial Set and Class Feature Applicability of Deep Neural Networks
Edward Collier, Supratik Mukhopadhyay
Auto-TLDR; Approximating Adversarial Learning in Deep Neural Networks Using Set and Class Adversaries
Abstract Slides Poster Similar
Fast and Accurate Real-Time Semantic Segmentation with Dilated Asymmetric Convolutions
Leonel Rosas-Arias, Gibran Benitez-Garcia, Jose Portillo-Portillo, Gabriel Sanchez-Perez, Keiji Yanai

Auto-TLDR; FASSD-Net: Dilated Asymmetric Pyramidal Fusion for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
Coarse to Fine: Progressive and Multi-Task Learning for Salient Object Detection
Dong-Goo Kang, Sangwoo Park, Joonki Paik
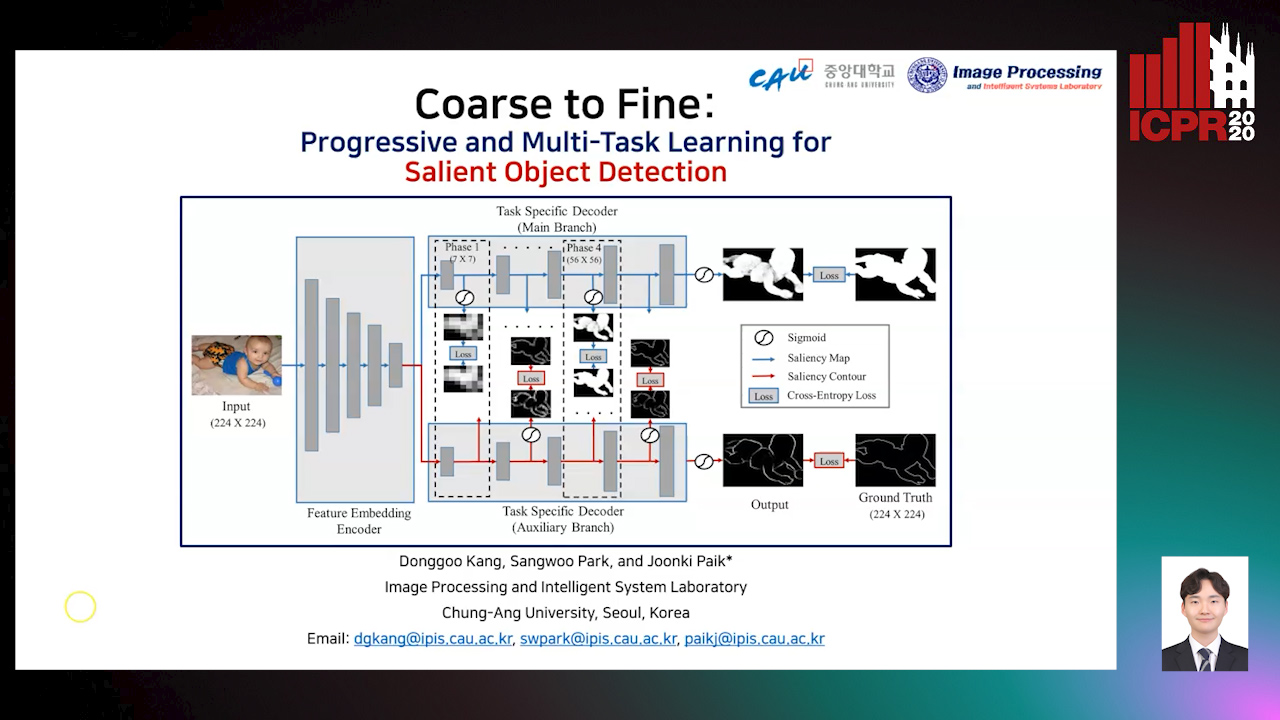
Auto-TLDR; Progressive and mutl-task learning scheme for salient object detection
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
PEAN: 3D Hand Pose Estimation Adversarial Network
Linhui Sun, Yifan Zhang, Jing Lu, Jian Cheng, Hanqing Lu
Auto-TLDR; PEAN: 3D Hand Pose Estimation with Adversarial Learning Framework
Abstract Slides Poster Similar
Super-Resolution Guided Pore Detection for Fingerprint Recognition
Syeda Nyma Ferdous, Ali Dabouei, Jeremy Dawson, Nasser M. Nasarabadi
Auto-TLDR; Super-Resolution Generative Adversarial Network for Fingerprint Recognition Using Pore Features
Abstract Slides Poster Similar
Ordinal Depth Classification Using Region-Based Self-Attention
Minh Hieu Phan, Son Lam Phung, Abdesselam Bouzerdoum

Auto-TLDR; Region-based Self-Attention for Multi-scale Depth Estimation from a Single 2D Image
Abstract Slides Poster Similar
Robust Pedestrian Detection in Thermal Imagery Using Synthesized Images
My Kieu, Lorenzo Berlincioni, Leonardo Galteri, Marco Bertini, Andrew Bagdanov, Alberto Del Bimbo

Auto-TLDR; Improving Pedestrian Detection in the thermal domain using Generative Adversarial Network
Abstract Slides Poster Similar