Feature Point Matching in Cross-Spectral Images with Cycle Consistency Learning
Ryosuke Furuta,
Naoaki Noguchi,
Xueting Wang,
Toshihiko Yamasaki
Auto-TLDR; Unsupervised Learning for General Feature Point Matching in Cross-Spectral Settings
Similar papers
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
Learning Stereo Matchability in Disparity Regression Networks
Jingyang Zhang, Yao Yao, Zixin Luo, Shiwei Li, Tianwei Shen, Tian Fang, Long Quan
Auto-TLDR; Deep Stereo Matchability for Weakly Matchable Regions
Domain Siamese CNNs for Sparse Multispectral Disparity Estimation
David-Alexandre Beaupre, Guillaume-Alexandre Bilodeau

Auto-TLDR; Multispectral Disparity Estimation between Thermal and Visible Images using Deep Neural Networks
Abstract Slides Poster Similar
Attention Stereo Matching Network
Doudou Zhang, Jing Cai, Yanbing Xue, Zan Gao, Hua Zhang

Auto-TLDR; ASM-Net: Attention Stereo Matching with Disparity Refinement
Abstract Slides Poster Similar
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Suppressing Features That Contain Disparity Edge for Stereo Matching
Xindong Ai, Zuliu Yang, Weida Yang, Yong Zhao, Zhengzhong Yu, Fuchi Li
Auto-TLDR; SDE-Attention: A Novel Attention Mechanism for Stereo Matching
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Leveraging a Weakly Adversarial Paradigm for Joint Learning of Disparity and Confidence Estimation
Matteo Poggi, Fabio Tosi, Filippo Aleotti, Stefano Mattoccia

Auto-TLDR; Joint Training of Deep-Networks for Outlier Detection from Stereo Images
Abstract Slides Poster Similar
Deeply-Fused Attentive Network for Stereo Matching
Zuliu Yang, Xindong Ai, Weida Yang, Yong Zhao, Qifei Dai, Fuchi Li

Auto-TLDR; DF-Net: Deep Learning-based Network for Stereo Matching
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
ResFPN: Residual Skip Connections in Multi-Resolution Feature Pyramid Networks for Accurate Dense Pixel Matching
Rishav ., René Schuster, Ramy Battrawy, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Resolution Feature Pyramid Networks for Dense Pixel Matching
5D Light Field Synthesis from a Monocular Video
Kyuho Bae, Andre Ivan, Hajime Nagahara, In Kyu Park

Auto-TLDR; Synthesis of Light Field Video from Monocular Video using Deep Learning
Enhancing Depth Quality of Stereo Vision Using Deep Learning-Based Prior Information of the Driving Environment
Weifu Li, Vijay John, Seiichi Mita
Auto-TLDR; A Novel Post-processing Mathematical Framework for Stereo Vision
Abstract Slides Poster Similar
Cycle-Consistent Adversarial Networks and Fast Adaptive Bi-Dimensional Empirical Mode Decomposition for Style Transfer
Elissavet Batziou, Petros Alvanitopoulos, Konstantinos Ioannidis, Ioannis Patras, Stefanos Vrochidis, Ioannis Kompatsiaris
Auto-TLDR; FABEMD: Fast and Adaptive Bidimensional Empirical Mode Decomposition for Style Transfer on Images
Abstract Slides Poster Similar
Galaxy Image Translation with Semi-Supervised Noise-Reconstructed Generative Adversarial Networks
Qiufan Lin, Dominique Fouchez, Jérôme Pasquet
Auto-TLDR; Semi-supervised Image Translation with Generative Adversarial Networks Using Paired and Unpaired Images
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Augmented Cyclic Consistency Regularization for Unpaired Image-To-Image Translation
Takehiko Ohkawa, Naoto Inoue, Hirokatsu Kataoka, Nakamasa Inoue
Auto-TLDR; Augmented Cyclic Consistency Regularization for Unpaired Image-to-Image Translation
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
The Surprising Effectiveness of Linear Unsupervised Image-to-Image Translation
Auto-TLDR; linear encoder-decoder architectures for unsupervised image-to-image translation
Abstract Slides Poster Similar
STaRFlow: A SpatioTemporal Recurrent Cell for Lightweight Multi-Frame Optical Flow Estimation
Pierre Godet, Alexandre Boulch, Aurélien Plyer, Guy Le Besnerais
Auto-TLDR; STaRFlow: A lightweight CNN-based algorithm for optical flow estimation
Abstract Slides Poster Similar
Delivering Meaningful Representation for Monocular Depth Estimation
Doyeon Kim, Donggyu Joo, Junmo Kim

Auto-TLDR; Monocular Depth Estimation by Bridging the Context between Encoding and Decoding
Abstract Slides Poster Similar
Multi-Scale Keypoint Matching
Auto-TLDR; Multi-Scale Keypoint Matching Using Multi-Scale Information
Abstract Slides Poster Similar
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Efficient Shadow Detection and Removal Using Synthetic Data with Domain Adaptation
Rui Guo, Babajide Ayinde, Hao Sun
Auto-TLDR; Shadow Detection and Removal with Domain Adaptation and Synthetic Image Database
HMFlow: Hybrid Matching Optical Flow Network for Small and Fast-Moving Objects
Suihanjin Yu, Youmin Zhang, Chen Wang, Xiao Bai, Liang Zhang, Edwin Hancock
Auto-TLDR; Hybrid Matching Optical Flow Network with Global Matching Component
Abstract Slides Poster Similar
Shape Consistent 2D Keypoint Estimation under Domain Shift
Levi Vasconcelos, Massimiliano Mancini, Davide Boscaini, Barbara Caputo, Elisa Ricci

Auto-TLDR; Deep Adaptation for Keypoint Prediction under Domain Shift
Abstract Slides Poster Similar
Learning Knowledge-Rich Sequential Model for Planar Homography Estimation in Aerial Video

Auto-TLDR; Sequential Estimation of Planar Homographic Transformations over Aerial Videos
Abstract Slides Poster Similar
Multi-Domain Image-To-Image Translation with Adaptive Inference Graph
The Phuc Nguyen, Stéphane Lathuiliere, Elisa Ricci
Auto-TLDR; Adaptive Graph Structure for Multi-Domain Image-to-Image Translation
Abstract Slides Poster Similar
Detail Fusion GAN: High-Quality Translation for Unpaired Images with GAN-Based Data Augmentation
Ling Li, Yaochen Li, Chuan Wu, Hang Dong, Peilin Jiang, Fei Wang

Auto-TLDR; Data Augmentation with GAN-based Generative Adversarial Network
Abstract Slides Poster Similar
Adaptive Estimation of Optimal Color Transformations for Deep Convolutional Network Based Homography Estimation
Miguel A. Molina-Cabello, Jorge García-González, Rafael Marcos Luque-Baena, Karl Thurnhofer-Hemsi, Ezequiel López-Rubio
Auto-TLDR; Improving Homography Estimation from a Pair of Natural Images Using Deep Convolutional Neural Networks
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
The Role of Cycle Consistency for Generating Better Human Action Videos from a Single Frame
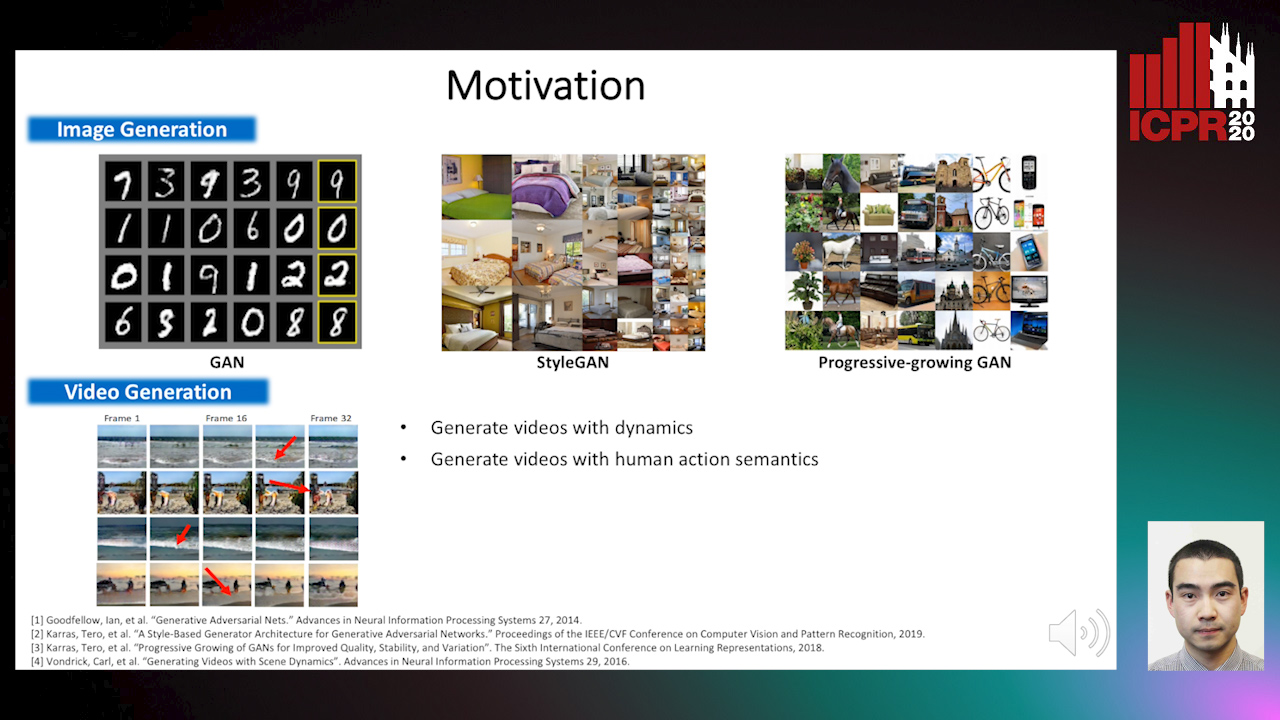
Auto-TLDR; Generating Videos with Human Action Semantics using Cycle Constraints
Abstract Slides Poster Similar
Small Object Detection Leveraging on Simultaneous Super-Resolution
Hong Ji, Zhi Gao, Xiaodong Liu, Tiancan Mei

Auto-TLDR; Super-Resolution via Generative Adversarial Network for Small Object Detection
Porting a Convolutional Neural Network for Stereo Matching in Hardware
Dionisis - Odysseas Sotiropoulos, George - Peter Economou
Auto-TLDR; Real-Time Stereo Matching with Artificial Neural Networks using FPGAs
Abstract Slides Poster Similar
Unsupervised Learning of Landmarks Based on Inter-Intra Subject Consistencies
Weijian Li, Haofu Liao, Shun Miao, Le Lu, Jiebo Luo
Auto-TLDR; Unsupervised Learning for Facial Landmark Discovery using Inter-subject Landmark consistencies
Unsupervised Sound Source Localization From Audio-Image Pairs Using Input Gradient Map
Tomohiro Tanaka, Takahiro Shinozaki
Auto-TLDR; Unsupervised Sound Localization Using Gradient Method
Abstract Slides Poster Similar
RGB-Infrared Person Re-Identification Via Image Modality Conversion
Huangpeng Dai, Qing Xie, Yanchun Ma, Yongjian Liu, Shengwu Xiong
Auto-TLDR; CE2L: A Novel Network for Cross-Modality Re-identification with Feature Alignment
Abstract Slides Poster Similar
Spatial-Aware GAN for Unsupervised Person Re-Identification
Fangneng Zhan, Changgong Zhang

Auto-TLDR; Unsupervised Unsupervised Domain Adaptation for Person Re-Identification
Towards Artifacts-Free Image Defogging
Gabriele Graffieti, Davide Maltoni
Auto-TLDR; CurL-Defog: Learning Based Defogging with CycleGAN and HArD
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
DEN: Disentangling and Exchanging Network for Depth Completion
You-Feng Wu, Vu-Hoang Tran, Ting-Wei Chang, Wei-Chen Chiu, Ching-Chun Huang
Auto-TLDR; Disentangling and Exchanging Network for Depth Completion
Comparison of Deep Learning and Hand Crafted Features for Mining Simulation Data
Theodoros Georgiou, Sebastian Schmitt, Thomas Baeck, Nan Pu, Wei Chen, Michael Lew

Auto-TLDR; Automated Data Analysis of Flow Fields in Computational Fluid Dynamics Simulations
Abstract Slides Poster Similar
Distinctive 3D Local Deep Descriptors

Auto-TLDR; DIPs: Local Deep Descriptors for Point Cloud Regression
Abstract Slides Poster Similar
Deep Multi-Task Learning for Facial Expression Recognition and Synthesis Based on Selective Feature Sharing
Rui Zhao, Tianshan Liu, Jun Xiao, P. K. Daniel Lun, Kin-Man Lam
Auto-TLDR; Multi-task Learning for Facial Expression Recognition and Synthesis
Abstract Slides Poster Similar
Identity-Preserved Face Beauty Transformation with Conditional Generative Adversarial Networks
Auto-TLDR; Identity-preserved face beauty transformation using conditional GANs
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
Anime Sketch Colorization by Component-Based Matching Using Deep Appearance Features and Graph Representation
Thien Do, Pham Van, Anh Nguyen, Trung Dang, Quoc Nguyen, Bach Hoang, Giao Nguyen
Auto-TLDR; Combining Deep Learning and Graph Representation for Sketch Colorization
Abstract Slides Poster Similar