Learning Knowledge-Rich Sequential Model for Planar Homography Estimation in Aerial Video

Auto-TLDR; Sequential Estimation of Planar Homographic Transformations over Aerial Videos
Similar papers
Adaptive Estimation of Optimal Color Transformations for Deep Convolutional Network Based Homography Estimation
Miguel A. Molina-Cabello, Jorge García-González, Rafael Marcos Luque-Baena, Karl Thurnhofer-Hemsi, Ezequiel López-Rubio
Auto-TLDR; Improving Homography Estimation from a Pair of Natural Images Using Deep Convolutional Neural Networks
Abstract Slides Poster Similar
Mobile Augmented Reality: Fast, Precise, and Smooth Planar Object Tracking
Dmitrii Matveichev, Daw-Tung Lin

Auto-TLDR; Planar Object Tracking with Sparse Optical Flow Tracking and Descriptor Matching
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Visual Saliency Oriented Vehicle Scale Estimation
Qixin Chen, Tie Liu, Jiali Ding, Zejian Yuan, Yuanyuan Shang

Auto-TLDR; Regularized Intensity Matching for Vehicle Scale Estimation with salient object detection
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
What and How? Jointly Forecasting Human Action and Pose
Yanjun Zhu, Yanxia Zhang, Qiong Liu, Andreas Girgensohn

Auto-TLDR; Forecasting Human Actions and Motion Trajectories with Joint Action Classification and Pose Regression
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Learning Non-Rigid Surface Reconstruction from Spatio-Temporal Image Patches
Matteo Pedone, Abdelrahman Mostafa, Janne Heikkilä

Auto-TLDR; Dense Spatio-Temporal Depth Maps of Deformable Objects from Video Sequences
Abstract Slides Poster Similar
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
RWF-2000: An Open Large Scale Video Database for Violence Detection
Ming Cheng, Kunjing Cai, Ming Li
Auto-TLDR; Flow Gated Network for Violence Detection in Surveillance Cameras
Abstract Slides Poster Similar
Video Reconstruction by Spatio-Temporal Fusion of Blurred-Coded Image Pair
Anupama S, Prasan Shedligeri, Abhishek Pal, Kaushik Mitr
Auto-TLDR; Recovering Video from Motion-Blurred and Coded Exposure Images Using Deep Learning
Abstract Slides Poster Similar
Context Matters: Self-Attention for Sign Language Recognition
Fares Ben Slimane, Mohamed Bouguessa
Auto-TLDR; Attentional Network for Continuous Sign Language Recognition
Abstract Slides Poster Similar
A Multi-Task Neural Network for Action Recognition with 3D Key-Points
Rongxiao Tang, Wang Luyang, Zhenhua Guo
Auto-TLDR; Multi-task Neural Network for Action Recognition and 3D Human Pose Estimation
Abstract Slides Poster Similar
Learning to Find Good Correspondences of Multiple Objects
Youye Xie, Yingheng Tang, Gongguo Tang, William Hoff
Auto-TLDR; Multi-Object Inliers and Outliers for Perspective-n-Point and Object Recognition
Abstract Slides Poster Similar
A Two-Step Approach to Lidar-Camera Calibration
Yingna Su, Yaqing Ding, Jian Yang, Hui Kong

Auto-TLDR; Closed-Form Calibration of Lidar-camera System for Ego-motion Estimation and Scene Understanding
Abstract Slides Poster Similar
Visual Oriented Encoder: Integrating Multimodal and Multi-Scale Contexts for Video Captioning
Auto-TLDR; Visual Oriented Encoder for Video Captioning
Abstract Slides Poster Similar
Video Semantic Segmentation Using Deep Multi-View Representation Learning
Akrem Sellami, Salvatore Tabbone

Auto-TLDR; Deep Multi-view Representation Learning for Video Object Segmentation
Abstract Slides Poster Similar
Self-Supervised Joint Encoding of Motion and Appearance for First Person Action Recognition
Mirco Planamente, Andrea Bottino, Barbara Caputo

Auto-TLDR; A Single Stream Architecture for Egocentric Action Recognition from the First-Person Point of View
Abstract Slides Poster Similar
Vision-Based Multi-Modal Framework for Action Recognition
Djamila Romaissa Beddiar, Mourad Oussalah, Brahim Nini
Auto-TLDR; Multi-modal Framework for Human Activity Recognition Using RGB, Depth and Skeleton Data
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Continuous Sign Language Recognition with Iterative Spatiotemporal Fine-Tuning
Kenessary Koishybay, Medet Mukushev, Anara Sandygulova

Auto-TLDR; A Deep Neural Network for Continuous Sign Language Recognition with Iterative Gloss Recognition
Abstract Slides Poster Similar
User-Independent Gaze Estimation by Extracting Pupil Parameter and Its Mapping to the Gaze Angle

Auto-TLDR; Gaze Point Estimation using Pupil Shape for Generalization
Abstract Slides Poster Similar
Residual Learning of Video Frame Interpolation Using Convolutional LSTM
Auto-TLDR; Video Frame Interpolation Using Residual Learning and Convolutional LSTMs
Abstract Slides Poster Similar
SAT-Net: Self-Attention and Temporal Fusion for Facial Action Unit Detection
Zhihua Li, Zheng Zhang, Lijun Yin
Auto-TLDR; Temporal Fusion and Self-Attention Network for Facial Action Unit Detection
Abstract Slides Poster Similar
A Grid-Based Representation for Human Action Recognition
Soufiane Lamghari, Guillaume-Alexandre Bilodeau, Nicolas Saunier

Auto-TLDR; GRAR: Grid-based Representation for Action Recognition in Videos
Abstract Slides Poster Similar
Deep Realistic Novel View Generation for City-Scale Aerial Images
Koundinya Nouduri, Ke Gao, Joshua Fraser, Shizeng Yao, Hadi Aliakbarpour, Filiz Bunyak, Kannappan Palaniappan
Auto-TLDR; End-to-End 3D Voxel Renderer for Multi-View Stereo Data Generation and Evaluation
Abstract Slides Poster Similar
Deep Homography-Based Video Stabilization
Maria Silvia Ito, Ebroul Izquierdo
Auto-TLDR; Video Stabilization using Deep Learning and Spatial Transformer Networks
Abstract Slides Poster Similar
Learning Object Deformation and Motion Adaption for Semi-Supervised Video Object Segmentation
Xiaoyang Zheng, Xin Tan, Jianming Guo, Lizhuang Ma
Auto-TLDR; Semi-supervised Video Object Segmentation with Mask-propagation-based Model
Abstract Slides Poster Similar
Cross-Lingual Text Image Recognition Via Multi-Task Sequence to Sequence Learning
Zhuo Chen, Fei Yin, Xu-Yao Zhang, Qing Yang, Cheng-Lin Liu
Auto-TLDR; Cross-Lingual Text Image Recognition with Multi-task Learning
Abstract Slides Poster Similar
Towards Practical Compressed Video Action Recognition: A Temporal Enhanced Multi-Stream Network
Bing Li, Longteng Kong, Dongming Zhang, Xiuguo Bao, Di Huang, Yunhong Wang
Auto-TLDR; TEMSN: Temporal Enhanced Multi-Stream Network for Compressed Video Action Recognition
Abstract Slides Poster Similar
STaRFlow: A SpatioTemporal Recurrent Cell for Lightweight Multi-Frame Optical Flow Estimation
Pierre Godet, Alexandre Boulch, Aurélien Plyer, Guy Le Besnerais
Auto-TLDR; STaRFlow: A lightweight CNN-based algorithm for optical flow estimation
Abstract Slides Poster Similar
Video Face Manipulation Detection through Ensemble of CNNs
Nicolo Bonettini, Edoardo Daniele Cannas, Sara Mandelli, Luca Bondi, Paolo Bestagini, Stefano Tubaro
Auto-TLDR; Face Manipulation Detection in Video Sequences Using Convolutional Neural Networks
Unconstrained Vision Guided UAV Based Safe Helicopter Landing
Arindam Sikdar, Abhimanyu Sahu, Debajit Sen, Rohit Mahajan, Ananda Chowdhury

Auto-TLDR; Autonomous Helicopter Landing in Hazardous Environments from Unmanned Aerial Images Using Constrained Graph Clustering
Abstract Slides Poster Similar
Learning to Take Directions One Step at a Time
Qiyang Hu, Adrian Wälchli, Tiziano Portenier, Matthias Zwicker, Paolo Favaro
Auto-TLDR; Generating a Sequence of Motion Strokes from a Single Image
Abstract Slides Poster Similar
Context Visual Information-Based Deliberation Network for Video Captioning
Min Lu, Xueyong Li, Caihua Liu
Auto-TLDR; Context visual information-based deliberation network for video captioning
Abstract Slides Poster Similar
Edge-Aware Monocular Dense Depth Estimation with Morphology
Zhi Li, Xiaoyang Zhu, Haitao Yu, Qi Zhang, Yongshi Jiang

Auto-TLDR; Spatio-Temporally Smooth Dense Depth Maps Using Only a CPU
Abstract Slides Poster Similar
Space-Time Domain Tensor Neural Networks: An Application on Human Pose Classification
Konstantinos Makantasis, Athanasios Voulodimos, Anastasios Doulamis, Nikolaos Doulamis, Nikolaos Bakalos
Auto-TLDR; Tensor-Based Neural Network for Spatiotemporal Pose Classifiaction using Three-Dimensional Skeleton Data
Abstract Slides Poster Similar
Minimal Solvers for Indoor UAV Positioning
Marcus Valtonen Örnhag, Patrik Persson, Mårten Wadenbäck, Kalle Åström, Anders Heyden

Auto-TLDR; Relative Pose Solvers for Visual Indoor UAV Navigation
Abstract Slides Poster Similar
Machine-Learned Regularization and Polygonization of Building Segmentation Masks
Stefano Zorzi, Ksenia Bittner, Friedrich Fraundorfer

Auto-TLDR; Automatic Regularization and Polygonization of Building Segmentation masks using Generative Adversarial Network
Abstract Slides Poster Similar
Domain Siamese CNNs for Sparse Multispectral Disparity Estimation
David-Alexandre Beaupre, Guillaume-Alexandre Bilodeau

Auto-TLDR; Multispectral Disparity Estimation between Thermal and Visible Images using Deep Neural Networks
Abstract Slides Poster Similar
The Role of Cycle Consistency for Generating Better Human Action Videos from a Single Frame
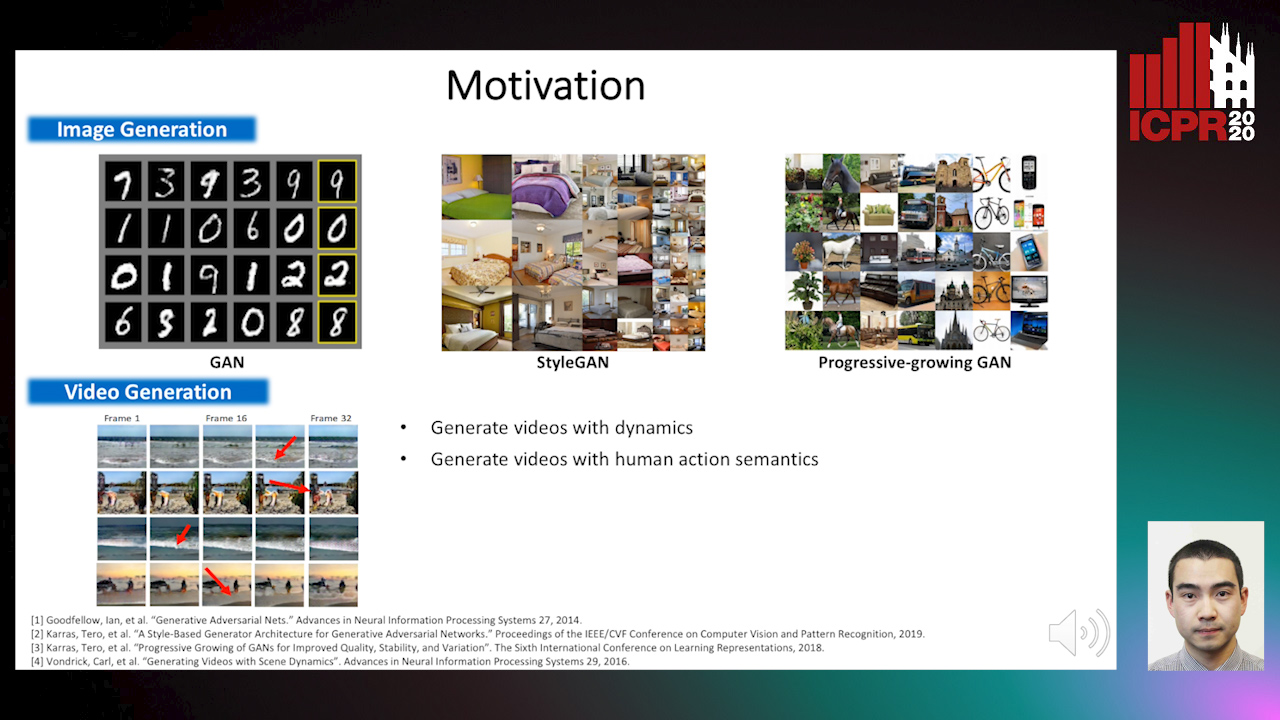
Auto-TLDR; Generating Videos with Human Action Semantics using Cycle Constraints
Abstract Slides Poster Similar
Orthographic Projection Linear Regression for Single Image 3D Human Pose Estimation
Yahui Zhang, Shaodi You, Theo Gevers

Auto-TLDR; A Deep Neural Network for 3D Human Pose Estimation from a Single 2D Image in the Wild
Abstract Slides Poster Similar
Detecting Manipulated Facial Videos: A Time Series Solution
Zhang Zhewei, Ma Can, Gao Meilin, Ding Bowen
Auto-TLDR; Face-Alignment Based Bi-LSTM for Fake Video Detection
Abstract Slides Poster Similar
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar
Mutual Information Based Method for Unsupervised Disentanglement of Video Representation
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; MIPAE: Mutual Information Predictive Auto-Encoder for Video Prediction
Abstract Slides Poster Similar