Domain Siamese CNNs for Sparse Multispectral Disparity Estimation
David-Alexandre Beaupre,
Guillaume-Alexandre Bilodeau

Auto-TLDR; Multispectral Disparity Estimation between Thermal and Visible Images using Deep Neural Networks
Similar papers
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
Learning Stereo Matchability in Disparity Regression Networks
Jingyang Zhang, Yao Yao, Zixin Luo, Shiwei Li, Tianwei Shen, Tian Fang, Long Quan
Auto-TLDR; Deep Stereo Matchability for Weakly Matchable Regions
Leveraging a Weakly Adversarial Paradigm for Joint Learning of Disparity and Confidence Estimation
Matteo Poggi, Fabio Tosi, Filippo Aleotti, Stefano Mattoccia

Auto-TLDR; Joint Training of Deep-Networks for Outlier Detection from Stereo Images
Abstract Slides Poster Similar
Feature Point Matching in Cross-Spectral Images with Cycle Consistency Learning
Ryosuke Furuta, Naoaki Noguchi, Xueting Wang, Toshihiko Yamasaki
Auto-TLDR; Unsupervised Learning for General Feature Point Matching in Cross-Spectral Settings
Abstract Slides Poster Similar
Attention Stereo Matching Network
Doudou Zhang, Jing Cai, Yanbing Xue, Zan Gao, Hua Zhang

Auto-TLDR; ASM-Net: Attention Stereo Matching with Disparity Refinement
Abstract Slides Poster Similar
Deeply-Fused Attentive Network for Stereo Matching
Zuliu Yang, Xindong Ai, Weida Yang, Yong Zhao, Qifei Dai, Fuchi Li

Auto-TLDR; DF-Net: Deep Learning-based Network for Stereo Matching
Abstract Slides Poster Similar
Suppressing Features That Contain Disparity Edge for Stereo Matching
Xindong Ai, Zuliu Yang, Weida Yang, Yong Zhao, Zhengzhong Yu, Fuchi Li
Auto-TLDR; SDE-Attention: A Novel Attention Mechanism for Stereo Matching
Abstract Slides Poster Similar
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
ResFPN: Residual Skip Connections in Multi-Resolution Feature Pyramid Networks for Accurate Dense Pixel Matching
Rishav ., René Schuster, Ramy Battrawy, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Resolution Feature Pyramid Networks for Dense Pixel Matching
Improving Image Matching with Varied Illumination
Auto-TLDR; Optimizing Feature Matching for Stereo Image Pairs by Stereo Illumination
Abstract Slides Poster Similar
EdgeNet: Semantic Scene Completion from a Single RGB-D Image
Aloisio Dourado, Teofilo De Campos, Adrian Hilton, Hansung Kim

Auto-TLDR; Semantic Scene Completion using 3D Depth and RGB Information
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Building Computationally Efficient and Well-Generalizing Person Re-Identification Models with Metric Learning
Vladislav Sovrasov, Dmitry Sidnev
Auto-TLDR; Cross-Domain Generalization in Person Re-identification using Omni-Scale Network
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Multi-Scale Cascading Network with Compact Feature Learning for RGB-Infrared Person Re-Identification
Can Zhang, Hong Liu, Wei Guo, Mang Ye
Auto-TLDR; Multi-Scale Part-Aware Cascading for RGB-Infrared Person Re-identification
Abstract Slides Poster Similar
Siamese Dynamic Mask Estimation Network for Fast Video Object Segmentation
Dexiang Hong, Guorong Li, Kai Xu, Li Su, Qingming Huang

Auto-TLDR; Siamese Dynamic Mask Estimation for Video Object Segmentation
Abstract Slides Poster Similar
RGB-Infrared Person Re-Identification Via Image Modality Conversion
Huangpeng Dai, Qing Xie, Yanchun Ma, Yongjian Liu, Shengwu Xiong
Auto-TLDR; CE2L: A Novel Network for Cross-Modality Re-identification with Feature Alignment
Abstract Slides Poster Similar
Finger Vein Recognition and Intra-Subject Similarity Evaluation of Finger Veins Using the CNN Triplet Loss
Georg Wimmer, Bernhard Prommegger, Andreas Uhl
Auto-TLDR; Finger vein recognition using CNNs and hard triplet online selection
Abstract Slides Poster Similar
Semi-Supervised Deep Learning Techniques for Spectrum Reconstruction
Adriano Simonetto, Vincent Parret, Alexander Gatto, Piergiorgio Sartor, Pietro Zanuttigh
Auto-TLDR; hyperspectral data estimation from RGB data using semi-supervised learning
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Self-Supervised Joint Encoding of Motion and Appearance for First Person Action Recognition
Mirco Planamente, Andrea Bottino, Barbara Caputo

Auto-TLDR; A Single Stream Architecture for Egocentric Action Recognition from the First-Person Point of View
Abstract Slides Poster Similar
Hierarchical Head Design for Object Detectors
Shivang Agarwal, Frederic Jurie
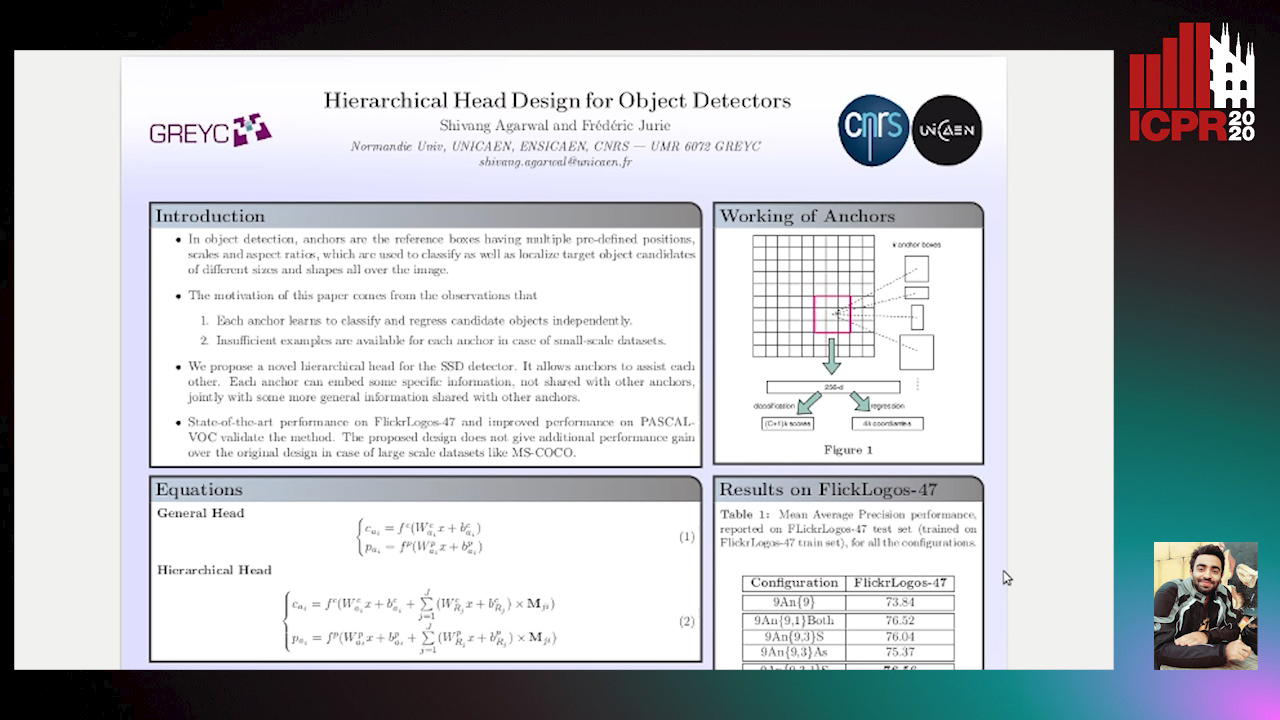
Auto-TLDR; Hierarchical Anchor for SSD Detector
Abstract Slides Poster Similar
3D Facial Matching by Spiral Convolutional Metric Learning and a Biometric Fusion-Net of Demographic Properties
Soha Sadat Mahdi, Nele Nauwelaers, Philip Joris, Giorgos Bouritsas, Imperial London, Sergiy Bokhnyak, Susan Walsh, Mark Shriver, Michael Bronstein, Peter Claes
Auto-TLDR; Multi-biometric Fusion for Biometric Verification using 3D Facial Mesures
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
ESResNet: Environmental Sound Classification Based on Visual Domain Models
Andrey Guzhov, Federico Raue, Jörn Hees, Andreas Dengel
Auto-TLDR; Environmental Sound Classification with Short-Time Fourier Transform Spectrograms
Abstract Slides Poster Similar
Surface IR Reflectance Estimation and Material Recognition Using ToF Camera
Auto-TLDR; Material Type Recognition Using IR Reflectance Based Material Type Recognitions
Abstract Slides Poster Similar
FatNet: A Feature-Attentive Network for 3D Point Cloud Processing
Chaitanya Kaul, Nick Pears, Suresh Manandhar

Auto-TLDR; Feature-Attentive Neural Networks for Point Cloud Classification and Segmentation
VGG-Embedded Adaptive Layer-Normalized Crowd Counting Net with Scale-Shuffling Modules
Dewen Guo, Jie Feng, Bingfeng Zhou
Auto-TLDR; VadaLN: VGG-embedded Adaptive Layer Normalization for Crowd Counting
Abstract Slides Poster Similar
On Identification and Retrieval of Near-Duplicate Biological Images: A New Dataset and Protocol
Thomas E. Koker, Sai Spandana Chintapalli, San Wang, Blake A. Talbot, Daniel Wainstock, Marcelo Cicconet, Mary C. Walsh

Auto-TLDR; BINDER: Bio-Image Near-Duplicate Examples Repository for Image Identification and Retrieval
Directional Graph Networks with Hard Weight Assignments
Miguel Dominguez, Raymond Ptucha
Auto-TLDR; Hard Directional Graph Networks for Point Cloud Analysis
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
Multi-Scale Keypoint Matching
Auto-TLDR; Multi-Scale Keypoint Matching Using Multi-Scale Information
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
STaRFlow: A SpatioTemporal Recurrent Cell for Lightweight Multi-Frame Optical Flow Estimation
Pierre Godet, Alexandre Boulch, Aurélien Plyer, Guy Le Besnerais
Auto-TLDR; STaRFlow: A lightweight CNN-based algorithm for optical flow estimation
Abstract Slides Poster Similar
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
Robust Pedestrian Detection in Thermal Imagery Using Synthesized Images
My Kieu, Lorenzo Berlincioni, Leonardo Galteri, Marco Bertini, Andrew Bagdanov, Alberto Del Bimbo

Auto-TLDR; Improving Pedestrian Detection in the thermal domain using Generative Adversarial Network
Abstract Slides Poster Similar
Image Sequence Based Cyclist Action Recognition Using Multi-Stream 3D Convolution
Stefan Zernetsch, Steven Schreck, Viktor Kress, Konrad Doll, Bernhard Sick

Auto-TLDR; 3D-ConvNet: A Multi-stream 3D Convolutional Neural Network for Detecting Cyclists in Real World Traffic Situations
Abstract Slides Poster Similar
Comparison of Deep Learning and Hand Crafted Features for Mining Simulation Data
Theodoros Georgiou, Sebastian Schmitt, Thomas Baeck, Nan Pu, Wei Chen, Michael Lew

Auto-TLDR; Automated Data Analysis of Flow Fields in Computational Fluid Dynamics Simulations
Abstract Slides Poster Similar
Near-Infrared Depth-Independent Image Dehazing using Haar Wavelets
Sumit Laha, Ankit Sharma, Shengnan Hu, Hassan Foroosh
Auto-TLDR; A fusion algorithm for haze removal using Haar wavelets
Abstract Slides Poster Similar
RLST: A Reinforcement Learning Approach to Scene Text Detection Refinement
Xuan Peng, Zheng Huang, Kai Chen, Jie Guo, Weidong Qiu
Auto-TLDR; Saccadic Eye Movements and Peripheral Vision for Scene Text Detection using Reinforcement Learning
Abstract Slides Poster Similar
SSDL: Self-Supervised Domain Learning for Improved Face Recognition
Samadhi Poornima Kumarasinghe Wickrama Arachchilage, Ebroul Izquierdo
Auto-TLDR; Self-supervised Domain Learning for Face Recognition in unconstrained environments
Abstract Slides Poster Similar
Documents Counterfeit Detection through a Deep Learning Approach
Darwin Danilo Saire Pilco, Salvatore Tabbone
Auto-TLDR; End-to-End Learning for Counterfeit Documents Detection using Deep Neural Network
Abstract Slides Poster Similar
Video Face Manipulation Detection through Ensemble of CNNs
Nicolo Bonettini, Edoardo Daniele Cannas, Sara Mandelli, Luca Bondi, Paolo Bestagini, Stefano Tubaro
Auto-TLDR; Face Manipulation Detection in Video Sequences Using Convolutional Neural Networks
Improving Visual Relation Detection Using Depth Maps
Sahand Sharifzadeh, Sina Moayed Baharlou, Max Berrendorf, Rajat Koner, Volker Tresp
Auto-TLDR; Exploiting Depth Maps for Visual Relation Detection
Abstract Slides Poster Similar
Inner Eye Canthus Localization for Human Body Temperature Screening
Claudio Ferrari, Lorenzo Berlincioni, Marco Bertini, Alberto Del Bimbo
Auto-TLDR; Automatic Localization of the Inner Eye Canthus in Thermal Face Images using 3D Morphable Face Model
Abstract Slides Poster Similar