Image Sequence Based Cyclist Action Recognition Using Multi-Stream 3D Convolution
Stefan Zernetsch,
Steven Schreck,
Viktor Kress,
Konrad Doll,
Bernhard Sick

Auto-TLDR; 3D-ConvNet: A Multi-stream 3D Convolutional Neural Network for Detecting Cyclists in Real World Traffic Situations
Similar papers
What and How? Jointly Forecasting Human Action and Pose
Yanjun Zhu, Yanxia Zhang, Qiong Liu, Andreas Girgensohn

Auto-TLDR; Forecasting Human Actions and Motion Trajectories with Joint Action Classification and Pose Regression
Abstract Slides Poster Similar
Visual Prediction of Driver Behavior in Shared Road Areas
Peter Gawronski, Darius Burschka
Auto-TLDR; Predicting Vehicle Behavior in Shared Road Segment Intersections Using Topological Knowledge
Abstract Slides Poster Similar
Self-Supervised Joint Encoding of Motion and Appearance for First Person Action Recognition
Mirco Planamente, Andrea Bottino, Barbara Caputo

Auto-TLDR; A Single Stream Architecture for Egocentric Action Recognition from the First-Person Point of View
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Late Fusion of Bayesian and Convolutional Models for Action Recognition
Camille Maurice, Francisco Madrigal, Frederic Lerasle
Auto-TLDR; Fusion of Deep Neural Network and Bayesian-based Approach for Temporal Action Recognition
Abstract Slides Poster Similar
Transformer Networks for Trajectory Forecasting
Francesco Giuliari, Hasan Irtiza, Marco Cristani, Fabio Galasso
Auto-TLDR; TransformerNetworks for Trajectory Prediction of People Interactions
Abstract Slides Poster Similar
DAG-Net: Double Attentive Graph Neural Network for Trajectory Forecasting
Alessio Monti, Alessia Bertugli, Simone Calderara, Rita Cucchiara
Auto-TLDR; Recurrent Generative Model for Multi-modal Human Motion Behaviour in Urban Environments
Abstract Slides Poster Similar
Modeling Long-Term Interactions to Enhance Action Recognition
Alejandro Cartas, Petia Radeva, Mariella Dimiccoli
Auto-TLDR; A Hierarchical Long Short-Term Memory Network for Action Recognition in Egocentric Videos
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
Gabriella: An Online System for Real-Time Activity Detection in Untrimmed Security Videos
Mamshad Nayeem Rizve, Ugur Demir, Praveen Praveen Tirupattur, Aayush Jung Rana, Kevin Duarte, Ishan Rajendrakumar Dave, Yogesh Rawat, Mubarak Shah
Auto-TLDR; Gabriella: A Real-Time Online System for Activity Detection in Surveillance Videos
Developing Motion Code Embedding for Action Recognition in Videos
Maxat Alibayev, David Andrea Paulius, Yu Sun
Auto-TLDR; Motion Embedding via Motion Codes for Action Recognition
Abstract Slides Poster Similar
Motion Complementary Network for Efficient Action Recognition
Ke Cheng, Yifan Zhang, Chenghua Li, Jian Cheng, Hanqing Lu
Auto-TLDR; Efficient Motion Complementary Network for Action Recognition
Abstract Slides Poster Similar
Towards Practical Compressed Video Action Recognition: A Temporal Enhanced Multi-Stream Network
Bing Li, Longteng Kong, Dongming Zhang, Xiuguo Bao, Di Huang, Yunhong Wang
Auto-TLDR; TEMSN: Temporal Enhanced Multi-Stream Network for Compressed Video Action Recognition
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
A Grid-Based Representation for Human Action Recognition
Soufiane Lamghari, Guillaume-Alexandre Bilodeau, Nicolas Saunier

Auto-TLDR; GRAR: Grid-based Representation for Action Recognition in Videos
Abstract Slides Poster Similar
Global Feature Aggregation for Accident Anticipation
Mishal Fatima, Umar Karim Khan, Chong Min Kyung
Auto-TLDR; Feature Aggregation for Predicting Accidents in Video Sequences
AG-GAN: An Attentive Group-Aware GAN for Pedestrian Trajectory Prediction
Yue Song, Niccolò Bisagno, Syed Zohaib Hassan, Nicola Conci
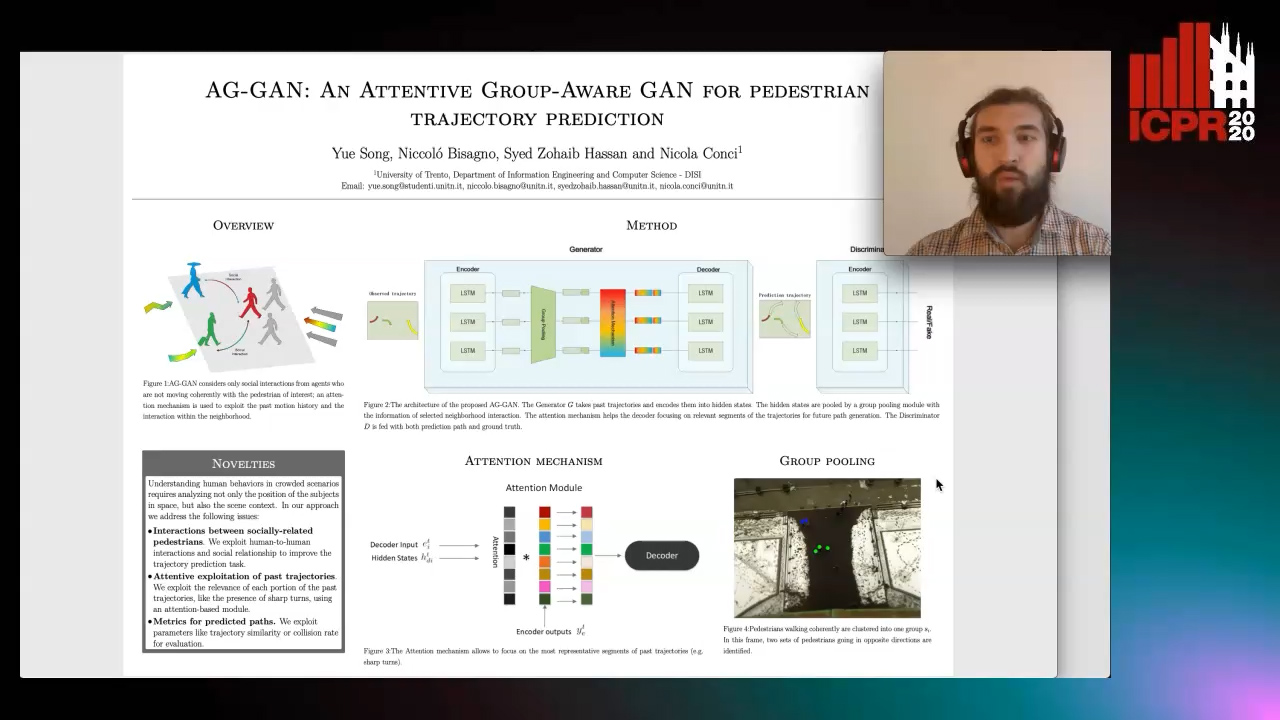
Auto-TLDR; An attentive group-aware GAN for motion prediction in crowded scenarios
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
Audio-Video Detection of the Active Speaker in Meetings
Francisco Madrigal, Frederic Lerasle, Lionel Pibre, Isabelle Ferrané

Auto-TLDR; Active Speaker Detection with Visual and Contextual Information from Meeting Context
Abstract Slides Poster Similar
3D Attention Mechanism for Fine-Grained Classification of Table Tennis Strokes Using a Twin Spatio-Temporal Convolutional Neural Networks
Pierre-Etienne Martin, Jenny Benois-Pineau, Renaud Péteri, Julien Morlier
Auto-TLDR; Attentional Blocks for Action Recognition in Table Tennis Strokes
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Real-Time End-To-End Lane ID Estimation Using Recurrent Networks
Ibrahim Halfaoui, Fahd Bouzaraa, Onay Urfalioglu

Auto-TLDR; Real-Time, Vision-Only Lane Identification Using Monocular Camera
Abstract Slides Poster Similar
Temporal Binary Representation for Event-Based Action Recognition
Simone Undri Innocenti, Federico Becattini, Federico Pernici, Alberto Del Bimbo
Auto-TLDR; Temporal Binary Representation for Gesture Recognition
Abstract Slides Poster Similar
Estimation of Clinical Tremor Using Spatio-Temporal Adversarial AutoEncoder
Li Zhang, Vidya Koesmahargyo, Isaac Galatzer-Levy
Auto-TLDR; ST-AAE: Spatio-temporal Adversarial Autoencoder for Clinical Assessment of Hand Tremor Frequency and Severity
Abstract Slides Poster Similar
Uncertainty-Sensitive Activity Recognition: A Reliability Benchmark and the CARING Models
Alina Roitberg, Monica Haurilet, Manuel Martinez, Rainer Stiefelhagen
Auto-TLDR; CARING: Calibrated Action Recognition with Input Guidance
Single View Learning in Action Recognition
Gaurvi Goyal, Nicoletta Noceti, Francesca Odone
Auto-TLDR; Cross-View Action Recognition Using Domain Adaptation for Knowledge Transfer
Abstract Slides Poster Similar
Semantic Segmentation for Pedestrian Detection from Motion in Temporal Domain

Auto-TLDR; Motion Profile: Recognizing Pedestrians along with their Motion Directions in a Temporal Way
Abstract Slides Poster Similar
Pose-Based Body Language Recognition for Emotion and Psychiatric Symptom Interpretation
Zhengyuan Yang, Amanda Kay, Yuncheng Li, Wendi Cross, Jiebo Luo
Auto-TLDR; Body Language Based Emotion Recognition for Psychiatric Symptoms Prediction
Abstract Slides Poster Similar
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
RWF-2000: An Open Large Scale Video Database for Violence Detection
Ming Cheng, Kunjing Cai, Ming Li
Auto-TLDR; Flow Gated Network for Violence Detection in Surveillance Cameras
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Learning Dictionaries of Kinematic Primitives for Action Classification
Alessia Vignolo, Nicoletta Noceti, Alessandra Sciutti, Francesca Odone, Giulio Sandini
Auto-TLDR; Action Understanding using Visual Motion Primitives
Abstract Slides Poster Similar
Depth Videos for the Classification of Micro-Expressions
Ankith Jain Rakesh Kumar, Bir Bhanu, Christopher Casey, Sierra Cheung, Aaron Seitz
Auto-TLDR; RGB-D Dataset for the Classification of Facial Micro-expressions
Abstract Slides Poster Similar
TinyVIRAT: Low-Resolution Video Action Recognition
Ugur Demir, Yogesh Rawat, Mubarak Shah
Auto-TLDR; TinyVIRAT: A Progressive Generative Approach for Action Recognition in Videos
Abstract Slides Poster Similar
Ghost Target Detection in 3D Radar Data Using Point Cloud Based Deep Neural Network
Mahdi Chamseddine, Jason Rambach, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Point Based Deep Learning for Ghost Target Detection in 3D Radar Point Clouds
Abstract Slides Poster Similar
A Detection-Based Approach to Multiview Action Classification in Infants
Carolina Pacheco, Effrosyni Mavroudi, Elena Kokkoni, Herbert Tanner, Rene Vidal
Auto-TLDR; Multiview Action Classification for Infants in a Pediatric Rehabilitation Environment
IPN Hand: A Video Dataset and Benchmark for Real-Time Continuous Hand Gesture Recognition
Gibran Benitez-Garcia, Jesus Olivares-Mercado, Gabriel Sanchez-Perez, Keiji Yanai
Auto-TLDR; IPN Hand: A Benchmark Dataset for Continuous Hand Gesture Recognition
Abstract Slides Poster Similar
Uncertainty Guided Recognition of Tiny Craters on the Moon
Thorsten Wilhelm, Christian Wöhler

Auto-TLDR; Accurately Detecting Tiny Craters in Remote Sensed Images Using Deep Neural Networks
Abstract Slides Poster Similar
Attention-Oriented Action Recognition for Real-Time Human-Robot Interaction
Ziyang Song, Ziyi Yin, Zejian Yuan, Chong Zhang, Wanchao Chi, Yonggen Ling, Shenghao Zhang
Auto-TLDR; Attention-Oriented Multi-Level Network for Action Recognition in Interaction Scenes
Abstract Slides Poster Similar
Precise Temporal Action Localization with Quantified Temporal Structure of Actions
Chongkai Lu, Ruimin Li, Hong Fu, Bin Fu, Yihao Wang, Wai Lun Lo, Zheru Chi
Auto-TLDR; Action progression networks for temporal action detection
Abstract Slides Poster Similar
Knowledge Distillation for Action Anticipation Via Label Smoothing
Guglielmo Camporese, Pasquale Coscia, Antonino Furnari, Giovanni Maria Farinella, Lamberto Ballan
Auto-TLDR; A Multi-Modal Framework for Action Anticipation using Long Short-Term Memory Networks
Abstract Slides Poster Similar
Detecting Anomalies from Video-Sequences: A Novel Descriptor
Giulia Orrù, Davide Ghiani, Maura Pintor, Gian Luca Marcialis, Fabio Roli
Auto-TLDR; Trit-based Measurement of Group Dynamics for Crowd Behavior Analysis and Anomaly Detection
Abstract Slides Poster Similar
A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control
Zahra Gharaee, Karl Holmquist, Linbo He, Michael Felsberg

Auto-TLDR; Bayesian Reinforcement Learning for Autonomous Driving
Abstract Slides Poster Similar
PolyLaneNet: Lane Estimation Via Deep Polynomial Regression
Talles Torres, Rodrigo Berriel, Thiago Paixão, Claudine Badue, Alberto F. De Souza, Thiago Oliveira-Santos
Auto-TLDR; Real-Time Lane Detection with Deep Polynomial Regression
Abstract Slides Poster Similar
Domain Siamese CNNs for Sparse Multispectral Disparity Estimation
David-Alexandre Beaupre, Guillaume-Alexandre Bilodeau

Auto-TLDR; Multispectral Disparity Estimation between Thermal and Visible Images using Deep Neural Networks
Abstract Slides Poster Similar
Correlation-Based ConvNet for Small Object Detection in Videos
Brais Bosquet, Manuel Mucientes, Victor Brea
Auto-TLDR; STDnet-ST: An End-to-End Spatio-Temporal Convolutional Neural Network for Small Object Detection in Video
Abstract Slides Poster Similar