Semantic Segmentation for Pedestrian Detection from Motion in Temporal Domain

Auto-TLDR; Motion Profile: Recognizing Pedestrians along with their Motion Directions in a Temporal Way
Similar papers
Human Segmentation with Dynamic LiDAR Data
Tao Zhong, Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi

Auto-TLDR; Spatiotemporal Neural Network for Human Segmentation with Dynamic Point Clouds
Sensor-Independent Pedestrian Detection for Personal Mobility Vehicles in Walking Space Using Dataset Generated by Simulation
Takahiro Shimizu, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Motoki Shino

Auto-TLDR; CosPointPillars: A 3D Object Detection Method for Pedestrian Detection in Walking Spaces
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Motion U-Net: Multi-Cue Encoder-Decoder Network for Motion Segmentation
Gani Rahmon, Filiz Bunyak, Kannappan Palaniappan

Auto-TLDR; Motion U-Net: A Deep Learning Framework for Robust Moving Object Detection under Challenging Conditions
Abstract Slides Poster Similar
Temporal Pulses Driven Spiking Neural Network for Time and Power Efficient Object Recognition in Autonomous Driving
Wei Wang, Shibo Zhou, Jingxi Li, Xiaohua Li, Junsong Yuan, Zhanpeng Jin

Auto-TLDR; Spiking Neural Network for Real-Time Object Recognition on Temporal LiDAR Pulses
Abstract Slides Poster Similar
Ground-truthing Large Human Behavior Monitoring Datasets
Tehreem Qasim, Robert Fisher, Naeem Bhatti
Auto-TLDR; Semi-automated Groundtruthing for Large Video Datasets
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Construction Worker Hardhat-Wearing Detection Based on an Improved BiFPN
Chenyang Zhang, Zhiqiang Tian, Jingyi Song, Yaoyue Zheng, Bo Xu

Auto-TLDR; A One-Stage Object Detection Method for Hardhat-Wearing in Construction Site
Abstract Slides Poster Similar
CARRADA Dataset: Camera and Automotive Radar with Range-Angle-Doppler Annotations
Arthur Ouaknine, Alasdair Newson, Julien Rebut, Florence Tupin, Patrick Pérez

Auto-TLDR; CARRADA: A dataset of synchronized camera and radar recordings with range-angle-Doppler annotations for autonomous driving
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
MagnifierNet: Learning Efficient Small-Scale Pedestrian Detector towards Multiple Dense Regions
Qi Cheng, Mingqin Chen, Yingjie Wu, Fei Chen, Shiping Lin

Auto-TLDR; MagnifierNet: A Simple but Effective Small-Scale Pedestrian Detection Towards Multiple Dense Regions
Abstract Slides Poster Similar
Dynamic Resource-Aware Corner Detection for Bio-Inspired Vision Sensors
Sherif Abdelmonem Sayed Mohamed, Jawad Yasin, Mohammad-Hashem Haghbayan, Antonio Miele, Jukka Veikko Heikkonen, Hannu Tenhunen, Juha Plosila
Auto-TLDR; Three Layer Filtering-Harris Algorithm for Event-based Cameras in Real-Time
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Gabriella: An Online System for Real-Time Activity Detection in Untrimmed Security Videos
Mamshad Nayeem Rizve, Ugur Demir, Praveen Praveen Tirupattur, Aayush Jung Rana, Kevin Duarte, Ishan Rajendrakumar Dave, Yogesh Rawat, Mubarak Shah
Auto-TLDR; Gabriella: A Real-Time Online System for Activity Detection in Surveillance Videos
Image Sequence Based Cyclist Action Recognition Using Multi-Stream 3D Convolution
Stefan Zernetsch, Steven Schreck, Viktor Kress, Konrad Doll, Bernhard Sick

Auto-TLDR; 3D-ConvNet: A Multi-stream 3D Convolutional Neural Network for Detecting Cyclists in Real World Traffic Situations
Abstract Slides Poster Similar
PRF-Ped: Multi-Scale Pedestrian Detector with Prior-Based Receptive Field
Yuzhi Tan, Hongxun Yao, Haoran Li, Xiusheng Lu, Haozhe Xie
Auto-TLDR; Bidirectional Feature Enhancement Module for Multi-Scale Pedestrian Detection
Abstract Slides Poster Similar
RWF-2000: An Open Large Scale Video Database for Violence Detection
Ming Cheng, Kunjing Cai, Ming Li
Auto-TLDR; Flow Gated Network for Violence Detection in Surveillance Cameras
Abstract Slides Poster Similar
Attention-Oriented Action Recognition for Real-Time Human-Robot Interaction
Ziyang Song, Ziyi Yin, Zejian Yuan, Chong Zhang, Wanchao Chi, Yonggen Ling, Shenghao Zhang
Auto-TLDR; Attention-Oriented Multi-Level Network for Action Recognition in Interaction Scenes
Abstract Slides Poster Similar
Street-Map Based Validation of Semantic Segmentation in Autonomous Driving
Laura Von Rueden, Tim Wirtz, Fabian Hueger, Jan David Schneider, Nico Piatkowski, Christian Bauckhage

Auto-TLDR; Semantic Segmentation Mask Validation Using A-priori Knowledge from Street Maps
Abstract Slides Poster Similar
Enhancing Depth Quality of Stereo Vision Using Deep Learning-Based Prior Information of the Driving Environment
Weifu Li, Vijay John, Seiichi Mita
Auto-TLDR; A Novel Post-processing Mathematical Framework for Stereo Vision
Abstract Slides Poster Similar
Temporal Feature Enhancement Network with External Memory for Object Detection in Surveillance Video
Masato Fujitake, Akihiro Sugimoto

Auto-TLDR; Temporal Attention Based External Memory Network for Surveillance Object Detection
Enhancing Semantic Segmentation of Aerial Images with Inhibitory Neurons
Ihsan Ullah, Sean Reilly, Michael Madden
Auto-TLDR; Lateral Inhibition in Deep Neural Networks for Object Recognition and Semantic Segmentation
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
An Adaptive Fusion Model Based on Kalman Filtering and LSTM for Fast Tracking of Road Signs
Chengliang Wang, Xin Xie, Chao Liao

Auto-TLDR; Fusion of ThunderNet and Region Growing Detector for Road Sign Detection and Tracking
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Nighttime Pedestrian Detection Based on Feature Attention and Transformation
Gang Li, Shanshan Zhang, Jian Yang
Auto-TLDR; FAM and FTM: Enhanced Feature Attention Module and Feature Transformation Module for nighttime pedestrian detection
Abstract Slides Poster Similar
PHNet: Parasite-Host Network for Video Crowd Counting
Shiqiao Meng, Jiajie Li, Weiwei Guo, Jinfeng Jiang, Lai Ye
Auto-TLDR; PHNet: A Parasite-Host Network for Video Crowd Counting
Abstract Slides Poster Similar
Video Semantic Segmentation Using Deep Multi-View Representation Learning
Akrem Sellami, Salvatore Tabbone

Auto-TLDR; Deep Multi-view Representation Learning for Video Object Segmentation
Abstract Slides Poster Similar
Utilising Visual Attention Cues for Vehicle Detection and Tracking
Feiyan Hu, Venkatesh Gurram Munirathnam, Noel E O'Connor, Alan Smeaton, Suzanne Little

Auto-TLDR; Visual Attention for Object Detection and Tracking in Driver-Assistance Systems
Abstract Slides Poster Similar
Real-time Pedestrian Lane Detection for Assistive Navigation using Neural Architecture Search
Sui Paul Ang, Son Lam Phung, Thi Nhat Anh Nguyen, Soan T. M. Duong, Abdesselam Bouzerdoum, Mark M. Schira
Auto-TLDR; Real-Time Pedestrian Lane Detection Using Deep Neural Networks
Abstract Slides Poster Similar
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
What and How? Jointly Forecasting Human Action and Pose
Yanjun Zhu, Yanxia Zhang, Qiong Liu, Andreas Girgensohn

Auto-TLDR; Forecasting Human Actions and Motion Trajectories with Joint Action Classification and Pose Regression
Abstract Slides Poster Similar
Learning to Take Directions One Step at a Time
Qiyang Hu, Adrian Wälchli, Tiziano Portenier, Matthias Zwicker, Paolo Favaro
Auto-TLDR; Generating a Sequence of Motion Strokes from a Single Image
Abstract Slides Poster Similar
Learning Defects in Old Movies from Manually Assisted Restoration
Arthur Renaudeau, Travis Seng, Axel Carlier, Jean-Denis Durou, Fabien Pierre, Francois Lauze, Jean-François Aujol
Auto-TLDR; U-Net: Detecting Defects in Old Movies by Inpainting Techniques
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Real-Time Drone Detection and Tracking with Visible, Thermal and Acoustic Sensors
Fredrik Svanström, Cristofer Englund, Fernando Alonso-Fernandez
Auto-TLDR; Automatic multi-sensor drone detection using sensor fusion
Abstract Slides Poster Similar
ResFPN: Residual Skip Connections in Multi-Resolution Feature Pyramid Networks for Accurate Dense Pixel Matching
Rishav ., René Schuster, Ramy Battrawy, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Resolution Feature Pyramid Networks for Dense Pixel Matching
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
AG-GAN: An Attentive Group-Aware GAN for Pedestrian Trajectory Prediction
Yue Song, Niccolò Bisagno, Syed Zohaib Hassan, Nicola Conci
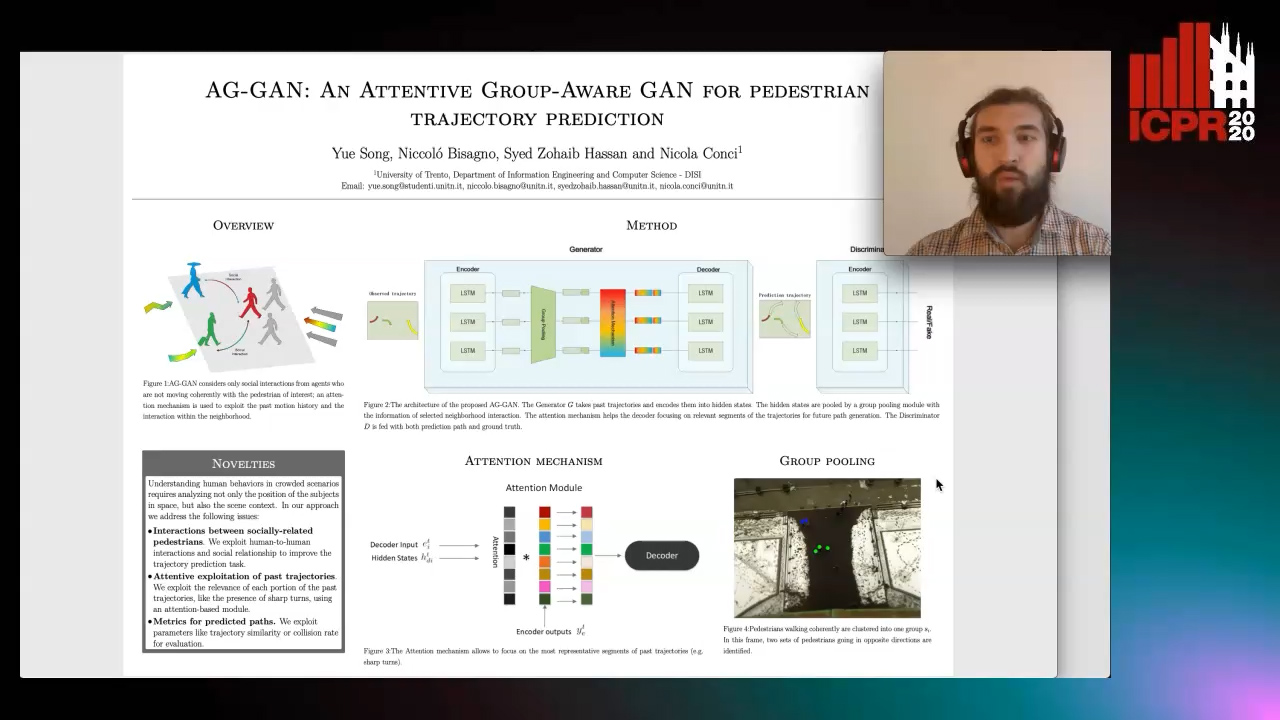
Auto-TLDR; An attentive group-aware GAN for motion prediction in crowded scenarios
Abstract Slides Poster Similar