Xiaohua Li
Papers from this author
Spiking Neural Networks with Single-Spike Temporal-Coded Neurons for Network Intrusion Detection
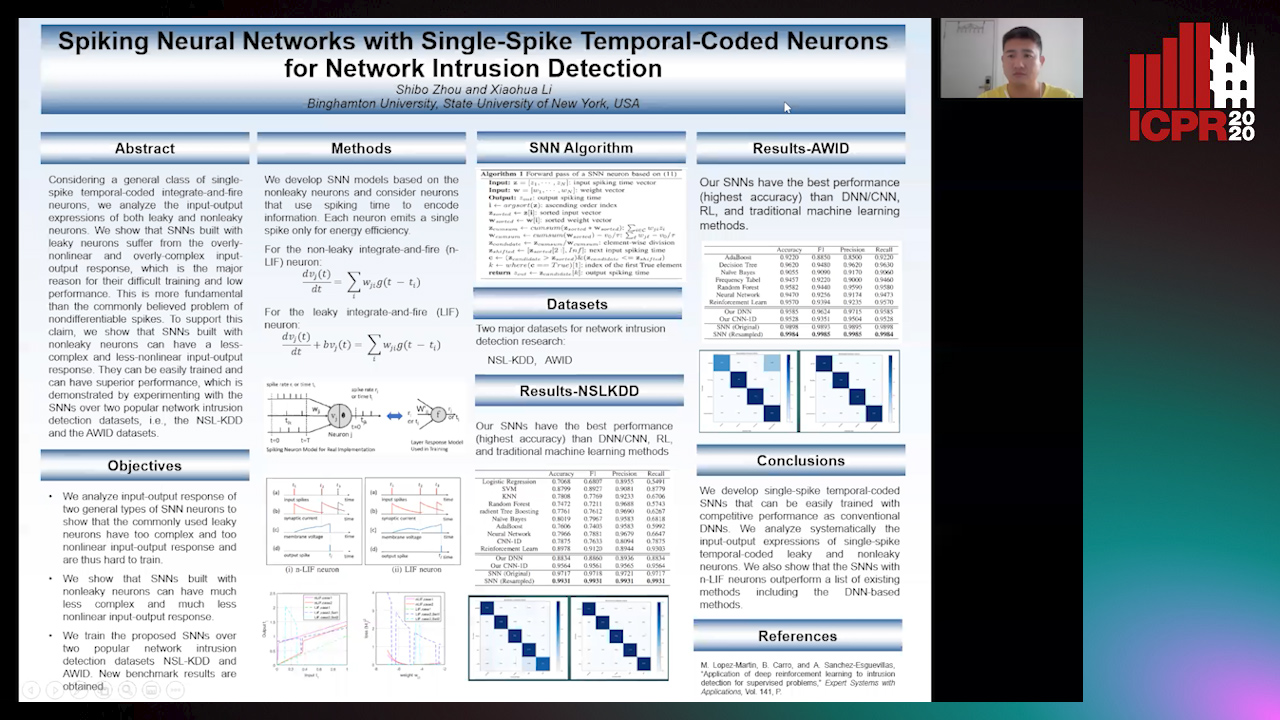
Auto-TLDR; Spiking Neural Network with Leaky Neurons
Abstract Slides Poster Similar
Temporal Pulses Driven Spiking Neural Network for Time and Power Efficient Object Recognition in Autonomous Driving
Wei Wang, Shibo Zhou, Jingxi Li, Xiaohua Li, Junsong Yuan, Zhanpeng Jin

Auto-TLDR; Spiking Neural Network for Real-Time Object Recognition on Temporal LiDAR Pulses
Abstract Slides Poster Similar