Real-Time Drone Detection and Tracking with Visible, Thermal and Acoustic Sensors
Fredrik Svanström,
Cristofer Englund,
Fernando Alonso-Fernandez
Auto-TLDR; Automatic multi-sensor drone detection using sensor fusion
Similar papers
Anomaly Detection, Localization and Classification for Railway Inspection
Riccardo Gasparini, Andrea D'Eusanio, Guido Borghi, Stefano Pini, Giuseppe Scaglione, Simone Calderara, Eugenio Fedeli, Rita Cucchiara

Auto-TLDR; Anomaly Detection and Localization using thermal images in the lowlight environment
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
CARRADA Dataset: Camera and Automotive Radar with Range-Angle-Doppler Annotations
Arthur Ouaknine, Alasdair Newson, Julien Rebut, Florence Tupin, Patrick Pérez

Auto-TLDR; CARRADA: A dataset of synchronized camera and radar recordings with range-angle-Doppler annotations for autonomous driving
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
Robust Pedestrian Detection in Thermal Imagery Using Synthesized Images
My Kieu, Lorenzo Berlincioni, Leonardo Galteri, Marco Bertini, Andrew Bagdanov, Alberto Del Bimbo

Auto-TLDR; Improving Pedestrian Detection in the thermal domain using Generative Adversarial Network
Abstract Slides Poster Similar
Ghost Target Detection in 3D Radar Data Using Point Cloud Based Deep Neural Network
Mahdi Chamseddine, Jason Rambach, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Point Based Deep Learning for Ghost Target Detection in 3D Radar Point Clouds
Abstract Slides Poster Similar
Detecting Marine Species in Echograms Via Traditional, Hybrid, and Deep Learning Frameworks
Porto Marques Tunai, Alireza Rezvanifar, Melissa Cote, Alexandra Branzan Albu, Kaan Ersahin, Todd Mudge, Stephane Gauthier
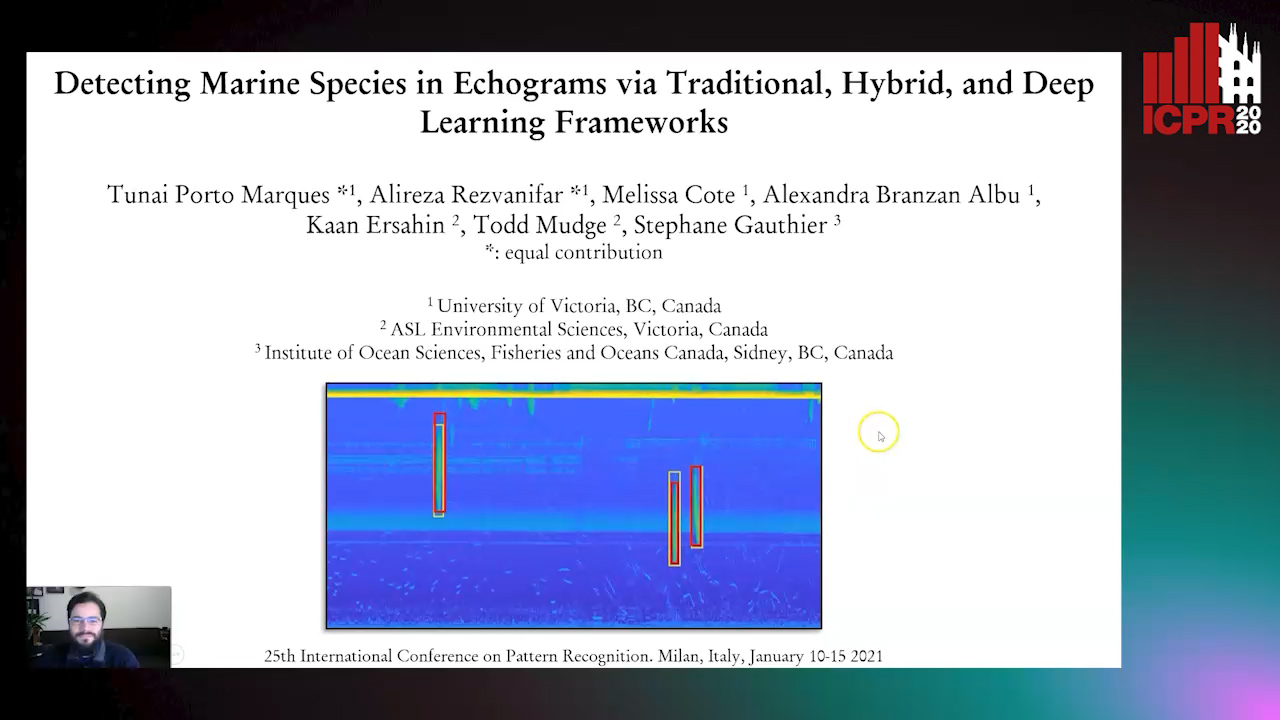
Auto-TLDR; End-to-End Deep Learning for Echogram Interpretation of Marine Species in Echograms
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
Complex-Object Visual Inspection: Empirical Studies on a Multiple Lighting Solution
Maya Aghaei, Matteo Bustreo, Pietro Morerio, Nicolò Carissimi, Alessio Del Bue, Vittorio Murino
Auto-TLDR; A Novel Illumination Setup for Automatic Visual Inspection of Complex Objects
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Radar Image Reconstruction from Raw ADC Data Using Parametric Variational Autoencoder with Domain Adaptation
Michael Stephan, Thomas Stadelmayer, Avik Santra, Georg Fischer, Robert Weigel, Fabian Lurz
Auto-TLDR; Parametric Variational Autoencoder-based Human Target Detection and Localization for Frequency Modulated Continuous Wave Radar
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
Semantic Segmentation for Pedestrian Detection from Motion in Temporal Domain

Auto-TLDR; Motion Profile: Recognizing Pedestrians along with their Motion Directions in a Temporal Way
Abstract Slides Poster Similar
Unconstrained Vision Guided UAV Based Safe Helicopter Landing
Arindam Sikdar, Abhimanyu Sahu, Debajit Sen, Rohit Mahajan, Ananda Chowdhury

Auto-TLDR; Autonomous Helicopter Landing in Hazardous Environments from Unmanned Aerial Images Using Constrained Graph Clustering
Abstract Slides Poster Similar
Multimodal End-To-End Learning for Autonomous Steering in Adverse Road and Weather Conditions
Jyri Sakari Maanpää, Josef Taher, Petri Manninen, Leo Pakola, Iaroslav Melekhov, Juha Hyyppä

Auto-TLDR; End-to-End Learning for Autonomous Steering in Adverse Road and Weather Conditions with Lidar Data
Abstract Slides Poster Similar
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
Visual Object Tracking in Drone Images with Deep Reinforcement Learning

Auto-TLDR; A Deep Reinforcement Learning based Single Object Tracker for Drone Applications
Abstract Slides Poster Similar
TGCRBNW: A Dataset for Runner Bib Number Detection (and Recognition) in the Wild
Pablo Hernández-Carrascosa, Adrian Penate-Sanchez, Javier Lorenzo, David Freire Obregón, Modesto Castrillon
Auto-TLDR; Racing Bib Number Detection and Recognition in the Wild Using Faster R-CNN
Abstract Slides Poster Similar
Real Time Fencing Move Classification and Detection at Touch Time During a Fencing Match
Cem Ekin Sunal, Chris G. Willcocks, Boguslaw Obara

Auto-TLDR; Fencing Body Move Classification and Detection Using Deep Learning
An Integrated Approach of Deep Learning and Symbolic Analysis for Digital PDF Table Extraction
Mengshi Zhang, Daniel Perelman, Vu Le, Sumit Gulwani
Auto-TLDR; Deep Learning and Symbolic Reasoning for Unstructured PDF Table Extraction
Abstract Slides Poster Similar
Construction Worker Hardhat-Wearing Detection Based on an Improved BiFPN
Chenyang Zhang, Zhiqiang Tian, Jingyi Song, Yaoyue Zheng, Bo Xu

Auto-TLDR; A One-Stage Object Detection Method for Hardhat-Wearing in Construction Site
Abstract Slides Poster Similar
Derivation of Geometrically and Semantically Annotated UAV Datasets at Large Scales from 3D City Models
Sidi Wu, Lukas Liebel, Marco Körner

Auto-TLDR; Large-Scale Dataset of Synthetic UAV Imagery for Geometric and Semantic Annotation
Abstract Slides Poster Similar
Gabriella: An Online System for Real-Time Activity Detection in Untrimmed Security Videos
Mamshad Nayeem Rizve, Ugur Demir, Praveen Praveen Tirupattur, Aayush Jung Rana, Kevin Duarte, Ishan Rajendrakumar Dave, Yogesh Rawat, Mubarak Shah
Auto-TLDR; Gabriella: A Real-Time Online System for Activity Detection in Surveillance Videos
Localization of Unmanned Aerial Vehicles in Corridor Environments Using Deep Learning
Ram Padhy, Shahzad Ahmad, Sachin Verma, Sambit Bakshi, Pankaj Kumar Sa
Auto-TLDR; A monocular vision assisted localization algorithm for indoor corridor environments
Abstract Slides Poster Similar
Wireless Localisation in WiFi Using Novel Deep Architectures
Peizheng Li, Han Cui, Aftab Khan, Usman Raza, Robert Piechocki, Angela Doufexi, Tim Farnham
Auto-TLDR; Deep Neural Network for Indoor Localisation of WiFi Devices in Indoor Environments
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Automatic Classification of Human Granulosa Cells in Assisted Reproductive Technology Using Vibrational Spectroscopy Imaging
Marina Paolanti, Emanuele Frontoni, Giorgia Gioacchini, Giorgini Elisabetta, Notarstefano Valentina, Zacà Carlotta, Carnevali Oliana, Andrea Borini, Marco Mameli

Auto-TLDR; Predicting Oocyte Quality in Assisted Reproductive Technology Using Machine Learning Techniques
Abstract Slides Poster Similar
Real-Time Driver Drowsiness Detection Using Facial Action Units
Malaika Vijay, Nandagopal Netrakanti Vinayak, Maanvi Nunna, Subramanyam Natarajan
Auto-TLDR; Real-Time Detection of Driver Drowsiness using Facial Action Units using Extreme Gradient Boosting
Abstract Slides Poster Similar
Detecting Anomalies from Video-Sequences: A Novel Descriptor
Giulia Orrù, Davide Ghiani, Maura Pintor, Gian Luca Marcialis, Fabio Roli
Auto-TLDR; Trit-based Measurement of Group Dynamics for Crowd Behavior Analysis and Anomaly Detection
Abstract Slides Poster Similar
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
Inner Eye Canthus Localization for Human Body Temperature Screening
Claudio Ferrari, Lorenzo Berlincioni, Marco Bertini, Alberto Del Bimbo
Auto-TLDR; Automatic Localization of the Inner Eye Canthus in Thermal Face Images using 3D Morphable Face Model
Abstract Slides Poster Similar
Thermal Image Enhancement Using Generative Adversarial Network for Pedestrian Detection
Mohamed Amine Marnissi, Hajer Fradi, Anis Sahbani, Najoua Essoukri Ben Amara
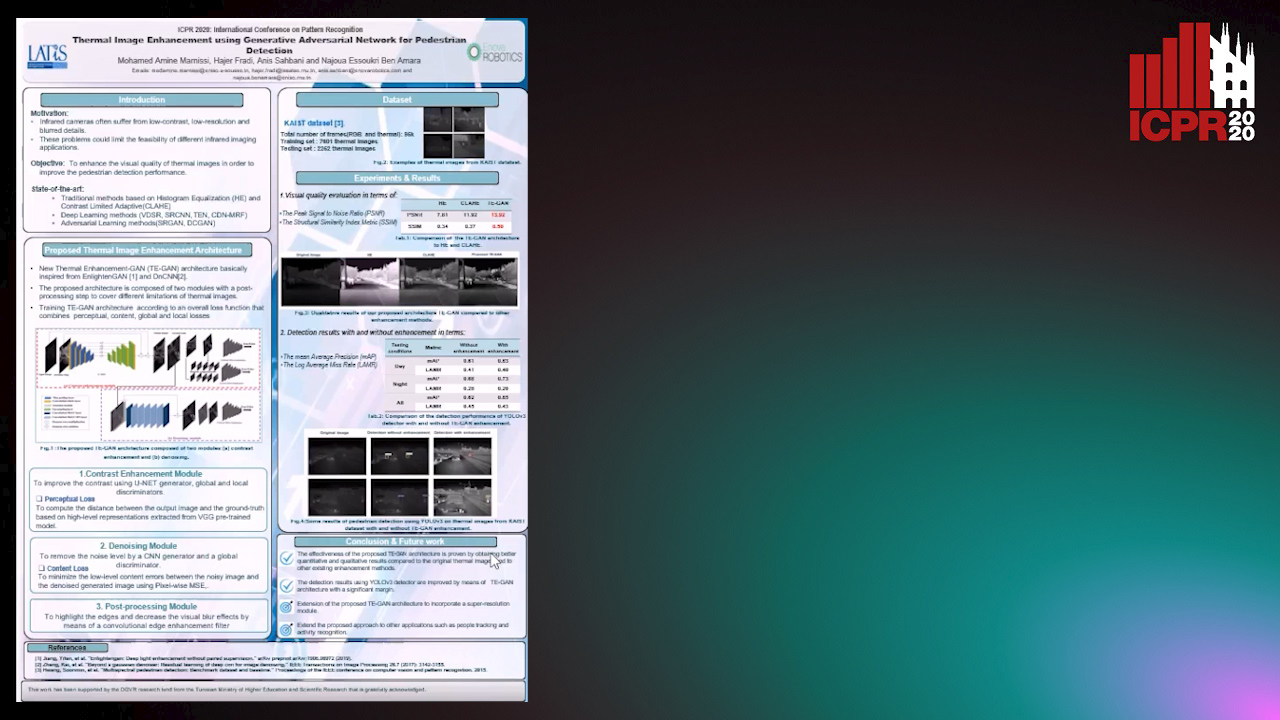
Auto-TLDR; Improving Visual Quality of Infrared Images for Pedestrian Detection Using Generative Adversarial Network
Abstract Slides Poster Similar
Utilising Visual Attention Cues for Vehicle Detection and Tracking
Feiyan Hu, Venkatesh Gurram Munirathnam, Noel E O'Connor, Alan Smeaton, Suzanne Little

Auto-TLDR; Visual Attention for Object Detection and Tracking in Driver-Assistance Systems
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
Image Sequence Based Cyclist Action Recognition Using Multi-Stream 3D Convolution
Stefan Zernetsch, Steven Schreck, Viktor Kress, Konrad Doll, Bernhard Sick

Auto-TLDR; 3D-ConvNet: A Multi-stream 3D Convolutional Neural Network for Detecting Cyclists in Real World Traffic Situations
Abstract Slides Poster Similar
A Detection-Based Approach to Multiview Action Classification in Infants
Carolina Pacheco, Effrosyni Mavroudi, Elena Kokkoni, Herbert Tanner, Rene Vidal
Auto-TLDR; Multiview Action Classification for Infants in a Pediatric Rehabilitation Environment
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
Electroencephalography Signal Processing Based on Textural Features for Monitoring the Driver’s State by a Brain-Computer Interface
Giulia Orrù, Marco Micheletto, Fabio Terranova, Gian Luca Marcialis

Auto-TLDR; One-dimensional Local Binary Pattern Algorithm for Estimating Driver Vigilance in a Brain-Computer Interface System
Abstract Slides Poster Similar
Spatial Bias in Vision-Based Voice Activity Detection
Kalin Stefanov, Mohammad Adiban, Giampiero Salvi
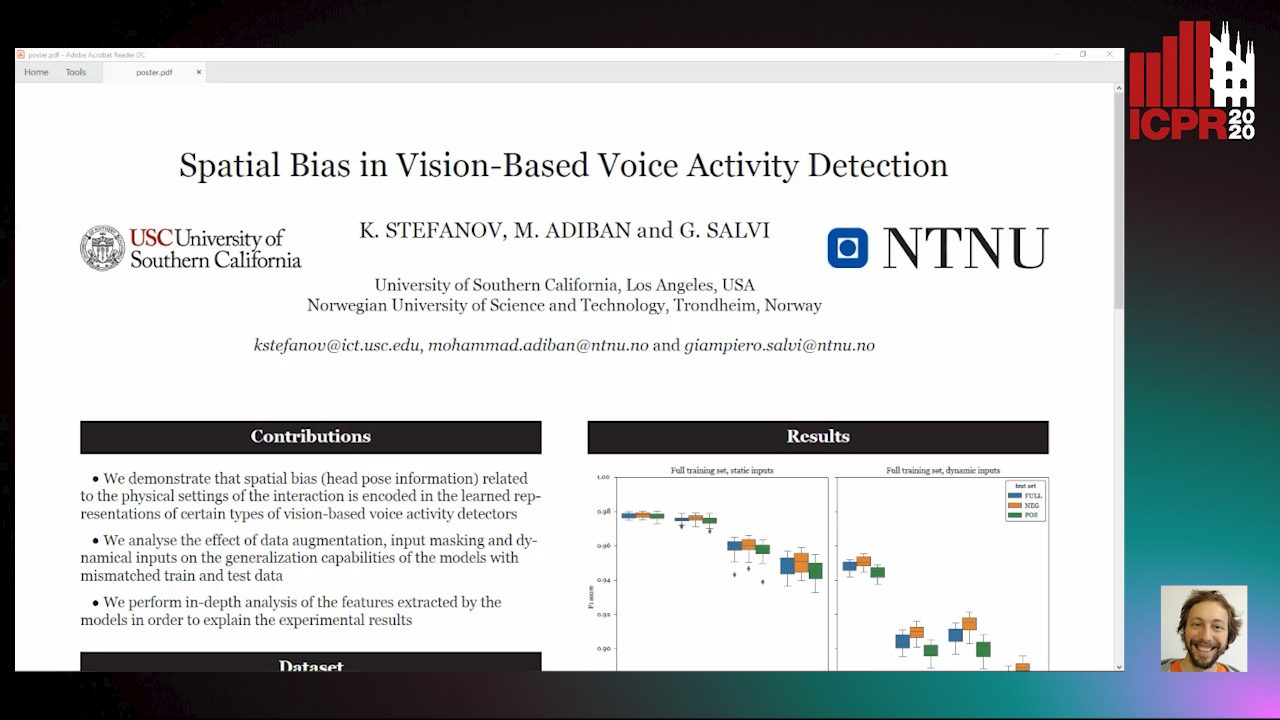
Auto-TLDR; Spatial Bias in Vision-based Voice Activity Detection in Multiparty Human-Human Interactions
Relevance Detection in Cataract Surgery Videos by Spatio-Temporal Action Localization
Negin Ghamsarian, Mario Taschwer, Doris Putzgruber, Stephanie. Sarny, Klaus Schoeffmann
Auto-TLDR; relevance-based retrieval in cataract surgery videos
Toward Building a Data-Driven System ForDetecting Mounting Actions of Black Beef Cattle
Yuriko Kawano, Susumu Saito, Nakano Teppei, Ikumi Kondo, Ryota Yamazaki, Hiromi Kusaka, Minoru Sakaguchi, Tetsuji Ogawa
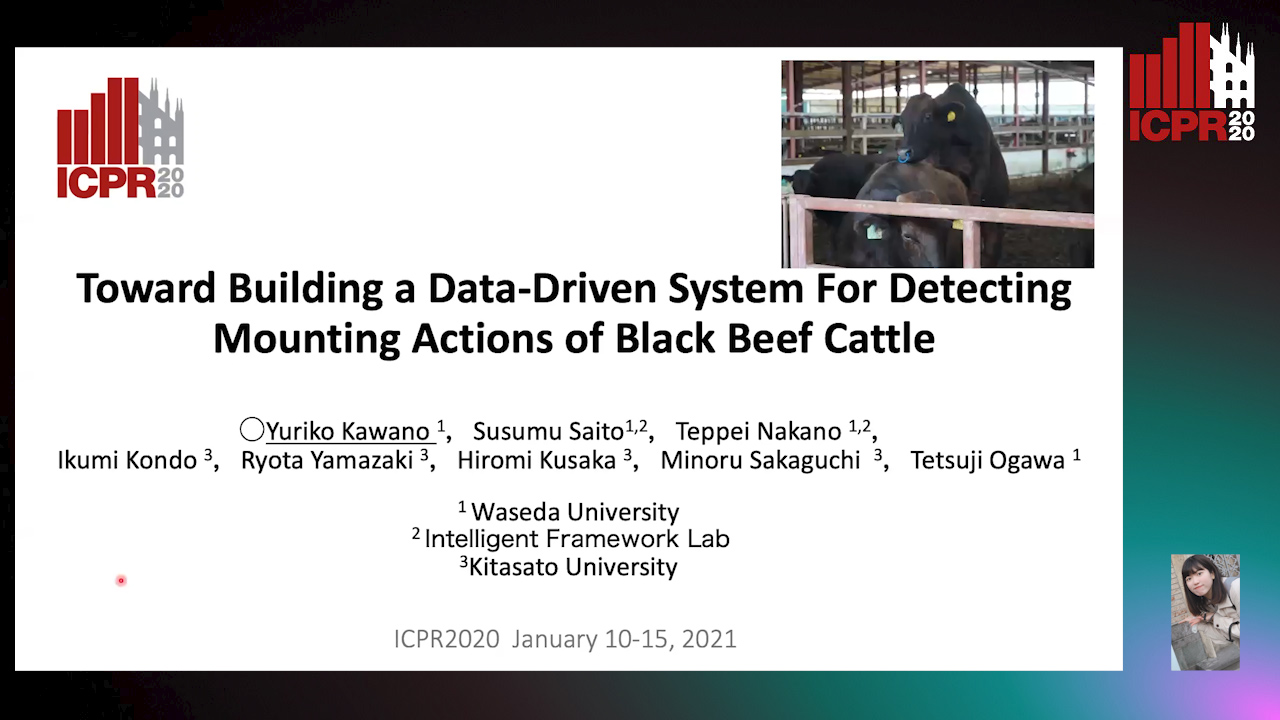
Auto-TLDR; Cattle Mounting Action Detection Using Crowdsourcing and Pattern Recognition
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar
Story Comparison for Estimating Field of View Overlap in a Video Collection
Thierry Malon, Sylvie Chambon, Alain Crouzil, Vincent Charvillat
Auto-TLDR; Finding Videos with Overlapping Fields of View Using Video Data
Ground-truthing Large Human Behavior Monitoring Datasets
Tehreem Qasim, Robert Fisher, Naeem Bhatti
Auto-TLDR; Semi-automated Groundtruthing for Large Video Datasets
Abstract Slides Poster Similar
Temporal Pulses Driven Spiking Neural Network for Time and Power Efficient Object Recognition in Autonomous Driving
Wei Wang, Shibo Zhou, Jingxi Li, Xiaohua Li, Junsong Yuan, Zhanpeng Jin

Auto-TLDR; Spiking Neural Network for Real-Time Object Recognition on Temporal LiDAR Pulses
Abstract Slides Poster Similar
Which are the factors affecting the performance of audio surveillance systems?
Antonio Greco, Antonio Roberto, Alessia Saggese, Mario Vento
Auto-TLDR; Sound Event Recognition Using Convolutional Neural Networks and Visual Representations on MIVIA Audio Events
RWF-2000: An Open Large Scale Video Database for Violence Detection
Ming Cheng, Kunjing Cai, Ming Li
Auto-TLDR; Flow Gated Network for Violence Detection in Surveillance Cameras
Abstract Slides Poster Similar