Multimodal End-To-End Learning for Autonomous Steering in Adverse Road and Weather Conditions
Jyri Sakari Maanpää,
Josef Taher,
Petri Manninen,
Leo Pakola,
Iaroslav Melekhov,
Juha Hyyppä

Auto-TLDR; End-to-End Learning for Autonomous Steering in Adverse Road and Weather Conditions with Lidar Data
Similar papers
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
PolyLaneNet: Lane Estimation Via Deep Polynomial Regression
Talles Torres, Rodrigo Berriel, Thiago Paixão, Claudine Badue, Alberto F. De Souza, Thiago Oliveira-Santos
Auto-TLDR; Real-Time Lane Detection with Deep Polynomial Regression
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
CARRADA Dataset: Camera and Automotive Radar with Range-Angle-Doppler Annotations
Arthur Ouaknine, Alasdair Newson, Julien Rebut, Florence Tupin, Patrick Pérez

Auto-TLDR; CARRADA: A dataset of synchronized camera and radar recordings with range-angle-Doppler annotations for autonomous driving
Abstract Slides Poster Similar
Real-Time End-To-End Lane ID Estimation Using Recurrent Networks
Ibrahim Halfaoui, Fahd Bouzaraa, Onay Urfalioglu

Auto-TLDR; Real-Time, Vision-Only Lane Identification Using Monocular Camera
Abstract Slides Poster Similar
Temporal Pulses Driven Spiking Neural Network for Time and Power Efficient Object Recognition in Autonomous Driving
Wei Wang, Shibo Zhou, Jingxi Li, Xiaohua Li, Junsong Yuan, Zhanpeng Jin

Auto-TLDR; Spiking Neural Network for Real-Time Object Recognition on Temporal LiDAR Pulses
Abstract Slides Poster Similar
A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control
Zahra Gharaee, Karl Holmquist, Linbo He, Michael Felsberg

Auto-TLDR; Bayesian Reinforcement Learning for Autonomous Driving
Abstract Slides Poster Similar
Ghost Target Detection in 3D Radar Data Using Point Cloud Based Deep Neural Network
Mahdi Chamseddine, Jason Rambach, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Point Based Deep Learning for Ghost Target Detection in 3D Radar Point Clouds
Abstract Slides Poster Similar
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
RONELD: Robust Neural Network Output Enhancement for Active Lane Detection
Zhe Ming Chng, Joseph Mun Hung Lew, Jimmy Addison Lee

Auto-TLDR; Real-Time Robust Neural Network Output Enhancement for Active Lane Detection
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Street-Map Based Validation of Semantic Segmentation in Autonomous Driving
Laura Von Rueden, Tim Wirtz, Fabian Hueger, Jan David Schneider, Nico Piatkowski, Christian Bauckhage

Auto-TLDR; Semantic Segmentation Mask Validation Using A-priori Knowledge from Street Maps
Abstract Slides Poster Similar
Visual Prediction of Driver Behavior in Shared Road Areas
Peter Gawronski, Darius Burschka
Auto-TLDR; Predicting Vehicle Behavior in Shared Road Segment Intersections Using Topological Knowledge
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Surface Material Dataset for Robotics Applications (SMDRA): A Dataset with Friction Coefficient and RGB-D for Surface Segmentation
Donghun Noh, Hyunwoo Nam, Min Sung Ahn, Hosik Chae, Sangjoon Lee, Kyle Gillespie, Dennis Hong
Auto-TLDR; A Surface Material Dataset for Robotics Applications
Abstract Slides Poster Similar
Visual Localization for Autonomous Driving: Mapping the Accurate Location in the City Maze
Dongfang Liu, Yiming Cui, Xiaolei Guo, Wei Ding, Baijian Yang, Yingjie Chen

Auto-TLDR; Feature Voting for Robust Visual Localization in Urban Settings
Abstract Slides Poster Similar
Single-Modal Incremental Terrain Clustering from Self-Supervised Audio-Visual Feature Learning
Reina Ishikawa, Ryo Hachiuma, Akiyoshi Kurobe, Hideo Saito
Auto-TLDR; Multi-modal Variational Autoencoder for Terrain Type Clustering
Abstract Slides Poster Similar
Anomaly Detection, Localization and Classification for Railway Inspection
Riccardo Gasparini, Andrea D'Eusanio, Guido Borghi, Stefano Pini, Giuseppe Scaglione, Simone Calderara, Eugenio Fedeli, Rita Cucchiara

Auto-TLDR; Anomaly Detection and Localization using thermal images in the lowlight environment
Wireless Localisation in WiFi Using Novel Deep Architectures
Peizheng Li, Han Cui, Aftab Khan, Usman Raza, Robert Piechocki, Angela Doufexi, Tim Farnham
Auto-TLDR; Deep Neural Network for Indoor Localisation of WiFi Devices in Indoor Environments
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
Lane Detection Based on Object Detection and Image-To-Image Translation
Hiroyuki Komori, Kazunori Onoguchi

Auto-TLDR; Lane Marking and Road Boundary Detection from Monocular Camera Images using Inverse Perspective Mapping
Abstract Slides Poster Similar
Real-Time Drone Detection and Tracking with Visible, Thermal and Acoustic Sensors
Fredrik Svanström, Cristofer Englund, Fernando Alonso-Fernandez
Auto-TLDR; Automatic multi-sensor drone detection using sensor fusion
Abstract Slides Poster Similar
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
Polarimetric Image Augmentation
Marc Blanchon, Fabrice Meriaudeau, Olivier Morel, Ralph Seulin, Desire Sidibe

Auto-TLDR; Polarimetric Augmentation for Deep Learning in Robotics Applications
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
Localization of Unmanned Aerial Vehicles in Corridor Environments Using Deep Learning
Ram Padhy, Shahzad Ahmad, Sachin Verma, Sambit Bakshi, Pankaj Kumar Sa
Auto-TLDR; A monocular vision assisted localization algorithm for indoor corridor environments
Abstract Slides Poster Similar
RWF-2000: An Open Large Scale Video Database for Violence Detection
Ming Cheng, Kunjing Cai, Ming Li
Auto-TLDR; Flow Gated Network for Violence Detection in Surveillance Cameras
Abstract Slides Poster Similar
Semantic Segmentation for Pedestrian Detection from Motion in Temporal Domain

Auto-TLDR; Motion Profile: Recognizing Pedestrians along with their Motion Directions in a Temporal Way
Abstract Slides Poster Similar
Loop-closure detection by LiDAR scan re-identification
Jukka Peltomäki, Xingyang Ni, Jussi Puura, Joni-Kristian Kamarainen, Heikki Juhani Huttunen

Auto-TLDR; Loop-Closing Detection from LiDAR Scans Using Convolutional Neural Networks
Abstract Slides Poster Similar
End-To-End Deep Learning Methods for Automated Damage Detection in Extreme Events at Various Scales
Yongsheng Bai, Alper Yilmaz, Halil Sezen

Auto-TLDR; Robust Mask R-CNN for Crack Detection in Extreme Events
Abstract Slides Poster Similar
Exploring Severe Occlusion: Multi-Person 3D Pose Estimation with Gated Convolution
Renshu Gu, Gaoang Wang, Jenq-Neng Hwang

Auto-TLDR; 3D Human Pose Estimation for Multi-Human Videos with Occlusion
Planar 3D Transfer Learning for End to End Unimodal MRI Unbalanced Data Segmentation
Martin Kolarik, Radim Burget, Carlos M. Travieso-Gonzalez, Jan Kocica
Auto-TLDR; Planar 3D Res-U-Net Network for Unbalanced 3D Image Segmentation using Fluid Attenuation Inversion Recover
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Location Prediction in Real Homes of Older Adults based on K-Means in Low-Resolution Depth Videos
Simon Simonsson, Flávia Dias Casagrande, Evi Zouganeli
Auto-TLDR; Semi-supervised Learning for Location Recognition and Prediction in Smart Homes using Depth Video Cameras
Abstract Slides Poster Similar
A Two-Step Approach to Lidar-Camera Calibration
Yingna Su, Yaqing Ding, Jian Yang, Hui Kong

Auto-TLDR; Closed-Form Calibration of Lidar-camera System for Ego-motion Estimation and Scene Understanding
Abstract Slides Poster Similar
RefiNet: 3D Human Pose Refinement with Depth Maps
Andrea D'Eusanio, Stefano Pini, Guido Borghi, Roberto Vezzani, Rita Cucchiara

Auto-TLDR; RefiNet: A Multi-stage Framework for 3D Human Pose Estimation
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
User-Independent Gaze Estimation by Extracting Pupil Parameter and Its Mapping to the Gaze Angle

Auto-TLDR; Gaze Point Estimation using Pupil Shape for Generalization
Abstract Slides Poster Similar
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Sensor-Independent Pedestrian Detection for Personal Mobility Vehicles in Walking Space Using Dataset Generated by Simulation
Takahiro Shimizu, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Motoki Shino

Auto-TLDR; CosPointPillars: A 3D Object Detection Method for Pedestrian Detection in Walking Spaces
Abstract Slides Poster Similar
Uncertainty-Sensitive Activity Recognition: A Reliability Benchmark and the CARING Models
Alina Roitberg, Monica Haurilet, Manuel Martinez, Rainer Stiefelhagen
Auto-TLDR; CARING: Calibrated Action Recognition with Input Guidance
Spatial Bias in Vision-Based Voice Activity Detection
Kalin Stefanov, Mohammad Adiban, Giampiero Salvi
Auto-TLDR; Spatial Bias in Vision-based Voice Activity Detection in Multiparty Human-Human Interactions
Removing Raindrops from a Single Image Using Synthetic Data
Yoshihito Kokubo, Shusaku Asada, Hirotaka Maruyama, Masaru Koide, Kohei Yamamoto, Yoshihisa Suetsugu
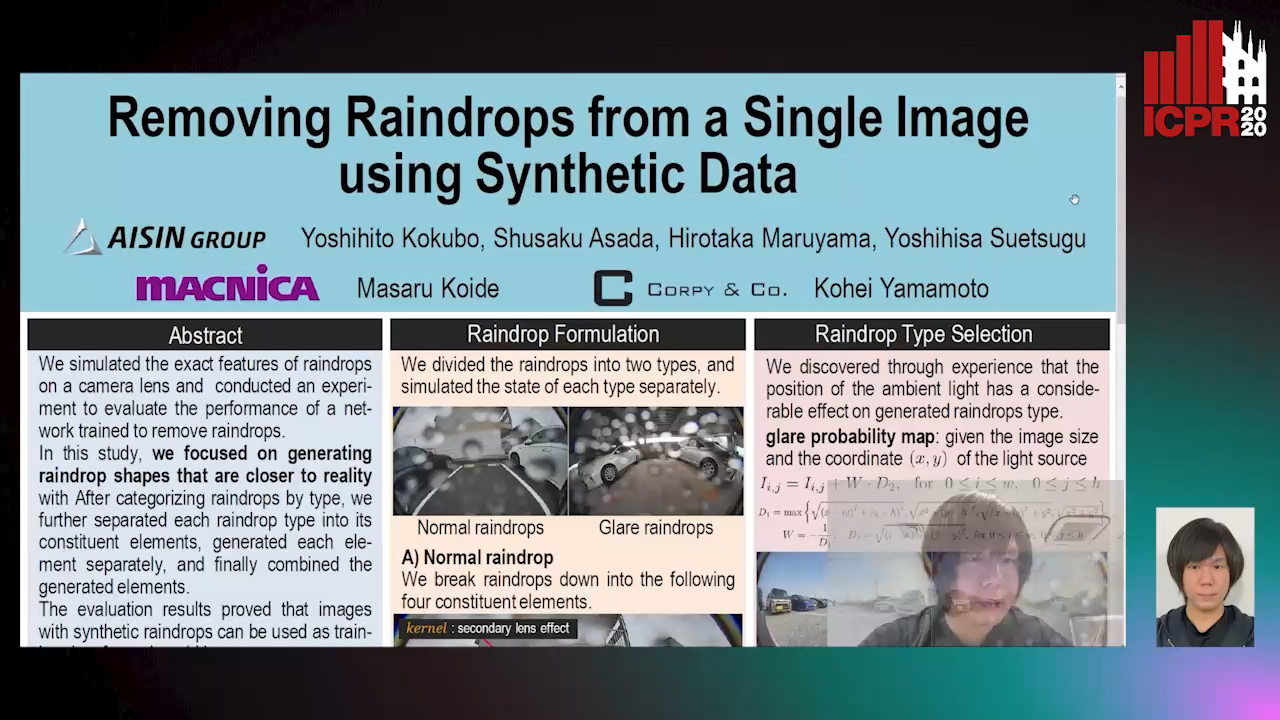
Auto-TLDR; Raindrop Removal Using Synthetic Raindrop Data
Abstract Slides Poster Similar