Loop-closure detection by LiDAR scan re-identification
Jukka Peltomäki,
Xingyang Ni,
Jussi Puura,
Joni-Kristian Kamarainen,
Heikki Juhani Huttunen

Auto-TLDR; Loop-Closing Detection from LiDAR Scans Using Convolutional Neural Networks
Similar papers
Rotation Invariant Aerial Image Retrieval with Group Convolutional Metric Learning
Hyunseung Chung, Woo-Jeoung Nam, Seong-Whan Lee
Auto-TLDR; Robust Remote Sensing Image Retrieval Using Group Convolution with Attention Mechanism and Metric Learning
Abstract Slides Poster Similar
Multi-Level Deep Learning Vehicle Re-Identification Using Ranked-Based Loss Functions
Eleni Kamenou, Jesus Martinez-Del-Rincon, Paul Miller, Patricia Devlin - Hill
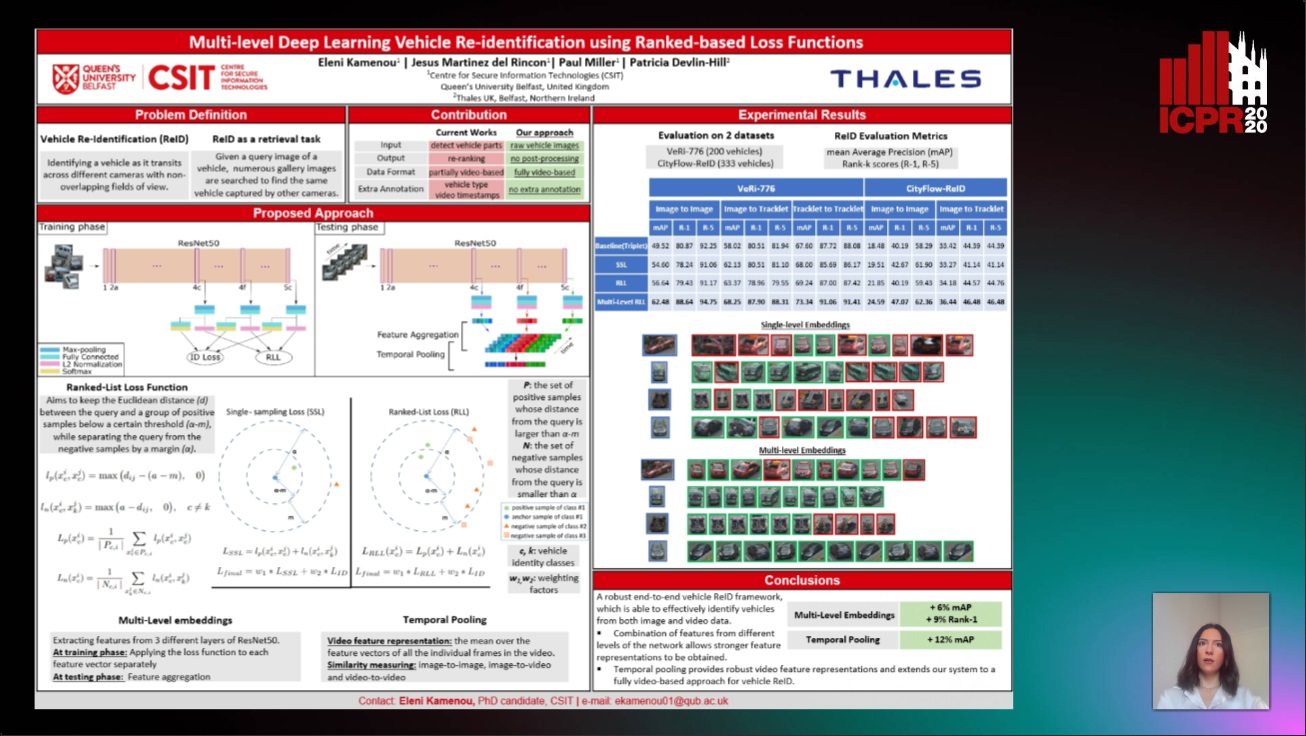
Auto-TLDR; Multi-Level Re-identification Network for Vehicle Re-Identification
Abstract Slides Poster Similar
Do We Really Need Scene-Specific Pose Encoders?
Auto-TLDR; Pose Regression Using Deep Convolutional Networks for Visual Similarity
Progressive Learning Algorithm for Efficient Person Re-Identification
Zhen Li, Hanyang Shao, Liang Niu, Nian Xue
Auto-TLDR; Progressive Learning Algorithm for Large-Scale Person Re-Identification
Abstract Slides Poster Similar
Attentive Part-Aware Networks for Partial Person Re-Identification
Lijuan Huo, Chunfeng Song, Zhengyi Liu, Zhaoxiang Zhang
Auto-TLDR; Part-Aware Learning for Partial Person Re-identification
Abstract Slides Poster Similar
Generalized Local Attention Pooling for Deep Metric Learning
Carlos Roig Mari, David Varas, Issey Masuda, Juan Carlos Riveiro, Elisenda Bou-Balust
Auto-TLDR; Generalized Local Attention Pooling for Deep Metric Learning
Abstract Slides Poster Similar
Building Computationally Efficient and Well-Generalizing Person Re-Identification Models with Metric Learning
Vladislav Sovrasov, Dmitry Sidnev
Auto-TLDR; Cross-Domain Generalization in Person Re-identification using Omni-Scale Network
Adaptive L2 Regularization in Person Re-Identification
Xingyang Ni, Liang Fang, Heikki Juhani Huttunen
Auto-TLDR; AdaptiveReID: Adaptive L2 Regularization for Person Re-identification
Abstract Slides Poster Similar
Rethinking ReID:Multi-Feature Fusion Person Re-Identification Based on Orientation Constraints
Mingjing Ai, Guozhi Shan, Bo Liu, Tianyang Liu
Auto-TLDR; Person Re-identification with Orientation Constrained Network
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Deep Top-Rank Counter Metric for Person Re-Identification
Chen Chen, Hao Dou, Xiyuan Hu, Silong Peng
Auto-TLDR; Deep Top-Rank Counter Metric for Person Re-identification
Abstract Slides Poster Similar
Top-DB-Net: Top DropBlock for Activation Enhancement in Person Re-Identification
Auto-TLDR; Top-DB-Net for Person Re-Identification using Top DropBlock
Abstract Slides Poster Similar
Learning Embeddings for Image Clustering: An Empirical Study of Triplet Loss Approaches
Kalun Ho, Janis Keuper, Franz-Josef Pfreundt, Margret Keuper
Auto-TLDR; Clustering Objectives for K-means and Correlation Clustering Using Triplet Loss
Abstract Slides Poster Similar
Not 3D Re-ID: Simple Single Stream 2D Convolution for Robust Video Re-Identification
Auto-TLDR; ResNet50-IBN for Video-based Person Re-Identification using Single Stream 2D Convolution Network
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Self and Channel Attention Network for Person Re-Identification
Asad Munir, Niki Martinel, Christian Micheloni
Auto-TLDR; SCAN: Self and Channel Attention Network for Person Re-identification
Abstract Slides Poster Similar
3D Facial Matching by Spiral Convolutional Metric Learning and a Biometric Fusion-Net of Demographic Properties
Soha Sadat Mahdi, Nele Nauwelaers, Philip Joris, Giorgos Bouritsas, Imperial London, Sergiy Bokhnyak, Susan Walsh, Mark Shriver, Michael Bronstein, Peter Claes
Auto-TLDR; Multi-biometric Fusion for Biometric Verification using 3D Facial Mesures
SL-DML: Signal Level Deep Metric Learning for Multimodal One-Shot Action Recognition
Raphael Memmesheimer, Nick Theisen, Dietrich Paulus
Auto-TLDR; One-Shot Action Recognition using Metric Learning
One-Shot Representational Learning for Joint Biometric and Device Authentication
Auto-TLDR; Joint Biometric and Device Recognition from a Single Biometric Image
Abstract Slides Poster Similar
Visual Localization for Autonomous Driving: Mapping the Accurate Location in the City Maze
Dongfang Liu, Yiming Cui, Xiaolei Guo, Wei Ding, Baijian Yang, Yingjie Chen

Auto-TLDR; Feature Voting for Robust Visual Localization in Urban Settings
Abstract Slides Poster Similar
Attention-Based Deep Metric Learning for Near-Duplicate Video Retrieval
Kuan-Hsun Wang, Chia Chun Cheng, Yi-Ling Chen, Yale Song, Shang-Hong Lai
Auto-TLDR; Attention-based Deep Metric Learning for Near-duplicate Video Retrieval
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Multi-Label Contrastive Focal Loss for Pedestrian Attribute Recognition
Xiaoqiang Zheng, Zhenxia Yu, Lin Chen, Fan Zhu, Shilong Wang

Auto-TLDR; Multi-label Contrastive Focal Loss for Pedestrian Attribute Recognition
Abstract Slides Poster Similar
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Deep Next-Best-View Planner for Cross-Season Visual Route Classification
Auto-TLDR; Active Visual Place Recognition using Deep Convolutional Neural Network
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Equation Attention Relationship Network (EARN) : A Geometric Deep Metric Framework for Learning Similar Math Expression Embedding
Saleem Ahmed, Kenny Davila, Srirangaraj Setlur, Venu Govindaraju
Auto-TLDR; Representational Learning for Similarity Based Retrieval of Mathematical Expressions
Abstract Slides Poster Similar
Localization of Unmanned Aerial Vehicles in Corridor Environments Using Deep Learning
Ram Padhy, Shahzad Ahmad, Sachin Verma, Sambit Bakshi, Pankaj Kumar Sa
Auto-TLDR; A monocular vision assisted localization algorithm for indoor corridor environments
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
Nonlinear Ranking Loss on Riemannian Potato Embedding
Byung Hyung Kim, Yoonje Suh, Honggu Lee, Sungho Jo
Auto-TLDR; Riemannian Potato for Rank-based Metric Learning
Abstract Slides Poster Similar
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Gabrielle Flood, David Gillsjö, Patrik Persson, Anders Heyden, Kalle Åström

Auto-TLDR; A Low-Memory Footprint Representation for Robust Map Merge
Abstract Slides Poster Similar
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
Supporting Skin Lesion Diagnosis with Content-Based Image Retrieval
Stefano Allegretti, Federico Bolelli, Federico Pollastri, Sabrina Longhitano, Giovanni Pellacani, Costantino Grana
Auto-TLDR; Skin Images Retrieval Using Convolutional Neural Networks for Skin Lesion Classification and Segmentation
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
SSDL: Self-Supervised Domain Learning for Improved Face Recognition
Samadhi Poornima Kumarasinghe Wickrama Arachchilage, Ebroul Izquierdo
Auto-TLDR; Self-supervised Domain Learning for Face Recognition in unconstrained environments
Abstract Slides Poster Similar
DAIL: Dataset-Aware and Invariant Learning for Face Recognition
Gaoang Wang, Chen Lin, Tianqiang Liu, Mingwei He, Jiebo Luo
Auto-TLDR; DAIL: Dataset-Aware and Invariant Learning for Face Recognition
Abstract Slides Poster Similar
RGB-Infrared Person Re-Identification Via Image Modality Conversion
Huangpeng Dai, Qing Xie, Yanchun Ma, Yongjian Liu, Shengwu Xiong
Auto-TLDR; CE2L: A Novel Network for Cross-Modality Re-identification with Feature Alignment
Abstract Slides Poster Similar
On Identification and Retrieval of Near-Duplicate Biological Images: A New Dataset and Protocol
Thomas E. Koker, Sai Spandana Chintapalli, San Wang, Blake A. Talbot, Daniel Wainstock, Marcelo Cicconet, Mary C. Walsh

Auto-TLDR; BINDER: Bio-Image Near-Duplicate Examples Repository for Image Identification and Retrieval
Pose Variation Adaptation for Person Re-Identification
Lei Zhang, Na Jiang, Qishuai Diao, Yue Xu, Zhong Zhou, Wei Wu
Auto-TLDR; Pose Transfer Generative Adversarial Network for Person Re-identification
Abstract Slides Poster Similar
A Systematic Investigation on Deep Architectures for Automatic Skin Lesions Classification
Pierluigi Carcagni, Marco Leo, Andrea Cuna, Giuseppe Celeste, Cosimo Distante
Auto-TLDR; RegNet: Deep Investigation of Convolutional Neural Networks for Automatic Classification of Skin Lesions
Abstract Slides Poster Similar
How Important Are Faces for Person Re-Identification?
Julia Dietlmeier, Joseph Antony, Kevin Mcguinness, Noel E O'Connor

Auto-TLDR; Anonymization of Person Re-identification Datasets with Face Detection and Blurring
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
Multi-Scale Cascading Network with Compact Feature Learning for RGB-Infrared Person Re-Identification
Can Zhang, Hong Liu, Wei Guo, Mang Ye
Auto-TLDR; Multi-Scale Part-Aware Cascading for RGB-Infrared Person Re-identification
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Object-Oriented Map Exploration and Construction Based on Auxiliary Task Aided DRL
Junzhe Xu, Jianhua Zhang, Shengyong Chen, Honghai Liu

Auto-TLDR; Auxiliary Task Aided Deep Reinforcement Learning for Environment Exploration by Autonomous Robots
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar