Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew,
Toby Breckon,
Magnus Bordewich,
Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Similar papers
Surface Material Dataset for Robotics Applications (SMDRA): A Dataset with Friction Coefficient and RGB-D for Surface Segmentation
Donghun Noh, Hyunwoo Nam, Min Sung Ahn, Hosik Chae, Sangjoon Lee, Kyle Gillespie, Dennis Hong
Auto-TLDR; A Surface Material Dataset for Robotics Applications
Abstract Slides Poster Similar
EdgeNet: Semantic Scene Completion from a Single RGB-D Image
Aloisio Dourado, Teofilo De Campos, Adrian Hilton, Hansung Kim

Auto-TLDR; Semantic Scene Completion using 3D Depth and RGB Information
Abstract Slides Poster Similar
A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control
Zahra Gharaee, Karl Holmquist, Linbo He, Michael Felsberg

Auto-TLDR; Bayesian Reinforcement Learning for Autonomous Driving
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
RLST: A Reinforcement Learning Approach to Scene Text Detection Refinement
Xuan Peng, Zheng Huang, Kai Chen, Jie Guo, Weidong Qiu
Auto-TLDR; Saccadic Eye Movements and Peripheral Vision for Scene Text Detection using Reinforcement Learning
Abstract Slides Poster Similar
Polarimetric Image Augmentation
Marc Blanchon, Fabrice Meriaudeau, Olivier Morel, Ralph Seulin, Desire Sidibe

Auto-TLDR; Polarimetric Augmentation for Deep Learning in Robotics Applications
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar
On Embodied Visual Navigation in Real Environments through Habitat
Marco Rosano, Antonino Furnari, Luigi Gulino, Giovanni Maria Farinella

Auto-TLDR; Learning Navigation Policies on Real World Observations using Real World Images and Sensor and Actuation Noise
Abstract Slides Poster Similar
Object-Oriented Map Exploration and Construction Based on Auxiliary Task Aided DRL
Junzhe Xu, Jianhua Zhang, Shengyong Chen, Honghai Liu

Auto-TLDR; Auxiliary Task Aided Deep Reinforcement Learning for Environment Exploration by Autonomous Robots
Low Dimensional State Representation Learning with Reward-Shaped Priors
Nicolò Botteghi, Ruben Obbink, Daan Geijs, Mannes Poel, Beril Sirmacek, Christoph Brune, Abeje Mersha, Stefano Stramigioli

Auto-TLDR; Unsupervised Learning for Unsupervised Reinforcement Learning in Robotics
Calibration and Absolute Pose Estimation of Trinocular Linear Camera Array for Smart City Applications
Martin Ahrnbom, Mikael Nilsson, Håkan Ardö, Kalle Åström, Oksana Yastremska-Kravchenko, Aliaksei Laureshyn

Auto-TLDR; Trinocular Linear Camera Array Calibration for Traffic Surveillance Applications
Abstract Slides Poster Similar
Deep Reinforcement Learning on a Budget: 3D Control and Reasoning without a Supercomputer
Edward Beeching, Jilles Steeve Dibangoye, Olivier Simonin, Christian Wolf
Auto-TLDR; Deep Reinforcement Learning in Mobile Robots Using 3D Environment Scenarios
Abstract Slides Poster Similar
Quantifying the Use of Domain Randomization
Mohammad Ani, Hector Basevi, Ales Leonardis
Auto-TLDR; Evaluating Domain Randomization for Synthetic Image Generation by directly measuring the difference between realistic and synthetic data distributions
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Enhancing Semantic Segmentation of Aerial Images with Inhibitory Neurons
Ihsan Ullah, Sean Reilly, Michael Madden
Auto-TLDR; Lateral Inhibition in Deep Neural Networks for Object Recognition and Semantic Segmentation
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Exploiting the Logits: Joint Sign Language Recognition and Spell-Correction
Christina Runkel, Stefan Dorenkamp, Hartmut Bauermeister, Michael Möller
Auto-TLDR; A Convolutional Neural Network for Spell-correction in Sign Language Videos
Abstract Slides Poster Similar
Loop-closure detection by LiDAR scan re-identification
Jukka Peltomäki, Xingyang Ni, Jussi Puura, Joni-Kristian Kamarainen, Heikki Juhani Huttunen

Auto-TLDR; Loop-Closing Detection from LiDAR Scans Using Convolutional Neural Networks
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
KoreALBERT: Pretraining a Lite BERT Model for Korean Language Understanding
Hyunjae Lee, Jaewoong Yun, Bongkyu Hwang, Seongho Joe, Seungjai Min, Youngjune Gwon
Auto-TLDR; KoreALBERT: A monolingual ALBERT model for Korean language understanding
Abstract Slides Poster Similar
Coarse to Fine: Progressive and Multi-Task Learning for Salient Object Detection
Dong-Goo Kang, Sangwoo Park, Joonki Paik
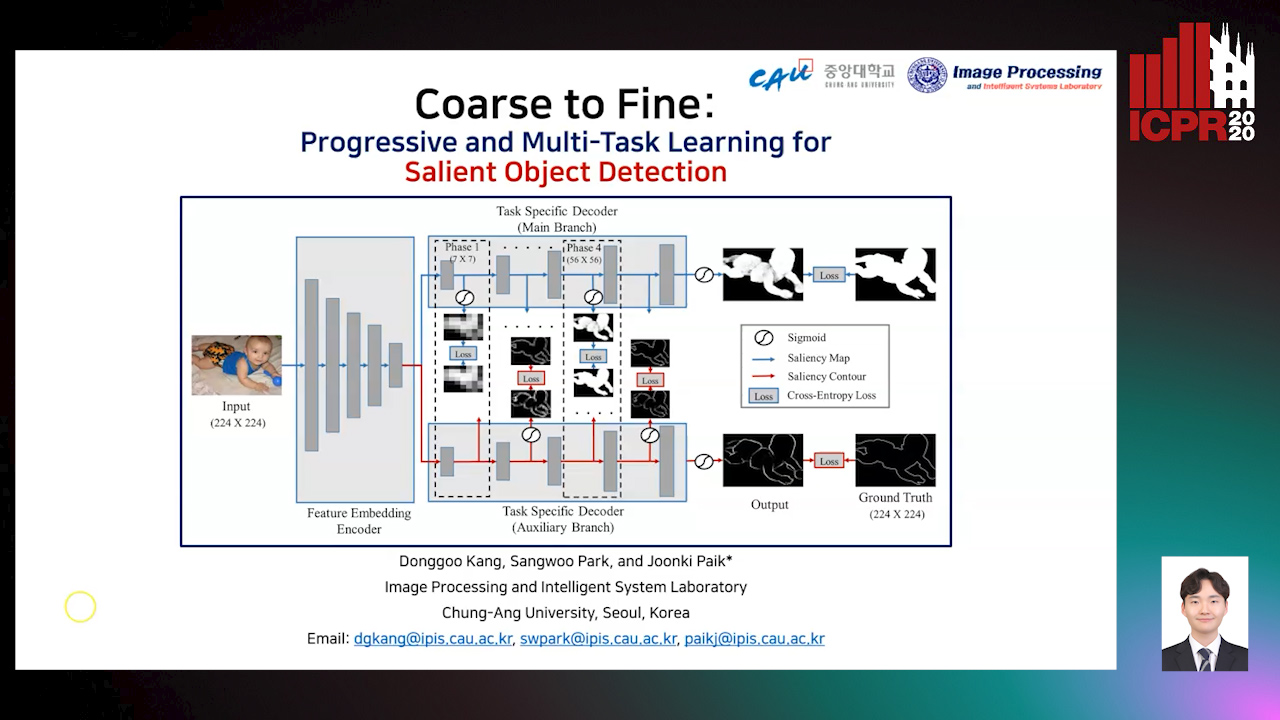
Auto-TLDR; Progressive and mutl-task learning scheme for salient object detection
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Developing Motion Code Embedding for Action Recognition in Videos
Maxat Alibayev, David Andrea Paulius, Yu Sun
Auto-TLDR; Motion Embedding via Motion Codes for Action Recognition
Abstract Slides Poster Similar
PROPEL: Probabilistic Parametric Regression Loss for Convolutional Neural Networks
Muhammad Asad, Rilwan Basaru, S M Masudur Rahman Al Arif, Greg Slabaugh
Auto-TLDR; PRObabilistic Parametric rEgression Loss for Probabilistic Regression Using Convolutional Neural Networks
SAILenv: Learning in Virtual Visual Environments Made Simple
Enrico Meloni, Luca Pasqualini, Matteo Tiezzi, Marco Gori, Stefano Melacci

Auto-TLDR; SAILenv: A Simple and Customized Platform for Visual Recognition in Virtual 3D Environment
Abstract Slides Poster Similar
Do We Really Need Scene-Specific Pose Encoders?
Auto-TLDR; Pose Regression Using Deep Convolutional Networks for Visual Similarity
6D Pose Estimation with Correlation Fusion
Yi Cheng, Hongyuan Zhu, Ying Sun, Cihan Acar, Wei Jing, Yan Wu, Liyuan Li, Cheston Tan, Joo-Hwee Lim

Auto-TLDR; Intra- and Inter-modality Fusion for 6D Object Pose Estimation with Attention Mechanism
Abstract Slides Poster Similar
Domain Siamese CNNs for Sparse Multispectral Disparity Estimation
David-Alexandre Beaupre, Guillaume-Alexandre Bilodeau

Auto-TLDR; Multispectral Disparity Estimation between Thermal and Visible Images using Deep Neural Networks
Abstract Slides Poster Similar
SECI-GAN: Semantic and Edge Completion for Dynamic Objects Removal
Francesco Pinto, Andrea Romanoni, Matteo Matteucci, Phil Torr
Auto-TLDR; SECI-GAN: Semantic and Edge Conditioned Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
A Close Look at Deep Learning with Small Data
Auto-TLDR; Low-Complex Neural Networks for Small Data Conditions
Abstract Slides Poster Similar
Multi-View Object Detection Using Epipolar Constraints within Cluttered X-Ray Security Imagery
Brian Kostadinov Shalon Isaac-Medina, Chris G. Willcocks, Toby Breckon

Auto-TLDR; Exploiting Epipolar Constraints for Multi-View Object Detection in X-ray Security Images
Abstract Slides Poster Similar
Self-Supervised Joint Encoding of Motion and Appearance for First Person Action Recognition
Mirco Planamente, Andrea Bottino, Barbara Caputo

Auto-TLDR; A Single Stream Architecture for Egocentric Action Recognition from the First-Person Point of View
Abstract Slides Poster Similar
FatNet: A Feature-Attentive Network for 3D Point Cloud Processing
Chaitanya Kaul, Nick Pears, Suresh Manandhar

Auto-TLDR; Feature-Attentive Neural Networks for Point Cloud Classification and Segmentation
Joint Supervised and Self-Supervised Learning for 3D Real World Challenges
Antonio Alliegro, Davide Boscaini, Tatiana Tommasi

Auto-TLDR; Self-supervision for 3D Shape Classification and Segmentation in Point Clouds
3D Facial Matching by Spiral Convolutional Metric Learning and a Biometric Fusion-Net of Demographic Properties
Soha Sadat Mahdi, Nele Nauwelaers, Philip Joris, Giorgos Bouritsas, Imperial London, Sergiy Bokhnyak, Susan Walsh, Mark Shriver, Michael Bronstein, Peter Claes
Auto-TLDR; Multi-biometric Fusion for Biometric Verification using 3D Facial Mesures
Meta Learning Via Learned Loss
Sarah Bechtle, Artem Molchanov, Yevgen Chebotar, Edward Thomas Grefenstette, Ludovic Righetti, Gaurav Sukhatme, Franziska Meier
Auto-TLDR; meta-learning for learning parametric loss functions that generalize across different tasks and model architectures
Fast and Accurate Real-Time Semantic Segmentation with Dilated Asymmetric Convolutions
Leonel Rosas-Arias, Gibran Benitez-Garcia, Jose Portillo-Portillo, Gabriel Sanchez-Perez, Keiji Yanai

Auto-TLDR; FASSD-Net: Dilated Asymmetric Pyramidal Fusion for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Visual Object Tracking in Drone Images with Deep Reinforcement Learning

Auto-TLDR; A Deep Reinforcement Learning based Single Object Tracker for Drone Applications
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Improved anomaly detection by training an autoencoder with skip connections on images corrupted with Stain-shaped noise
Anne-Sophie Collin, Christophe De Vleeschouwer
Auto-TLDR; Autoencoder with Skip Connections for Anomaly Detection
Abstract Slides Poster Similar
Generative Latent Implicit Conditional Optimization When Learning from Small Sample
Auto-TLDR; GLICO: Generative Latent Implicit Conditional Optimization for Small Sample Learning
Abstract Slides Poster Similar
Human Segmentation with Dynamic LiDAR Data
Tao Zhong, Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi

Auto-TLDR; Spatiotemporal Neural Network for Human Segmentation with Dynamic Point Clouds
ESResNet: Environmental Sound Classification Based on Visual Domain Models
Andrey Guzhov, Federico Raue, Jörn Hees, Andreas Dengel
Auto-TLDR; Environmental Sound Classification with Short-Time Fourier Transform Spectrograms
Abstract Slides Poster Similar
Walk the Lines: Object Contour Tracing CNN for Contour Completion of Ships
Auto-TLDR; Walk the Lines: A Convolutional Neural Network trained to follow object contours
Abstract Slides Poster Similar