PROPEL: Probabilistic Parametric Regression Loss for Convolutional Neural Networks
Muhammad Asad,
Rilwan Basaru,
S M Masudur Rahman Al Arif,
Greg Slabaugh
Auto-TLDR; PRObabilistic Parametric rEgression Loss for Probabilistic Regression Using Convolutional Neural Networks
Similar papers
PEAN: 3D Hand Pose Estimation Adversarial Network
Linhui Sun, Yifan Zhang, Jing Lu, Jian Cheng, Hanqing Lu
Auto-TLDR; PEAN: 3D Hand Pose Estimation with Adversarial Learning Framework
Abstract Slides Poster Similar
Deep Ordinal Regression with Label Diversity
Axel Berg, Magnus Oskarsson, Mark Oconnor

Auto-TLDR; Discrete Regression via Classification for Neural Network Learning
Orthographic Projection Linear Regression for Single Image 3D Human Pose Estimation
Yahui Zhang, Shaodi You, Theo Gevers

Auto-TLDR; A Deep Neural Network for 3D Human Pose Estimation from a Single 2D Image in the Wild
Abstract Slides Poster Similar
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Learning Natural Thresholds for Image Ranking
Somayeh Keshavarz, Quang Nhat Tran, Richard Souvenir

Auto-TLDR; Image Representation Learning and Label Discretization for Natural Image Ranking
Abstract Slides Poster Similar
Occlusion-Tolerant and Personalized 3D Human Pose Estimation in RGB Images

Auto-TLDR; Real-Time 3D Human Pose Estimation in BVH using Inverse Kinematics Solver and Neural Networks
HP2IFS: Head Pose Estimation Exploiting Partitioned Iterated Function Systems
Carmen Bisogni, Michele Nappi, Chiara Pero, Stefano Ricciardi
Auto-TLDR; PIFS based head pose estimation using fractal coding theory and Partitioned Iterated Function Systems
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
A Flatter Loss for Bias Mitigation in Cross-Dataset Facial Age Estimation
Ali Akbari, Muhammad Awais, Zhenhua Feng, Ammarah Farooq, Josef Kittler
Auto-TLDR; Cross-dataset Age Estimation for Neural Network Training
Abstract Slides Poster Similar
Generalization Comparison of Deep Neural Networks Via Output Sensitivity
Mahsa Forouzesh, Farnood Salehi, Patrick Thiran
Auto-TLDR; Generalization of Deep Neural Networks using Sensitivity
RefiNet: 3D Human Pose Refinement with Depth Maps
Andrea D'Eusanio, Stefano Pini, Guido Borghi, Roberto Vezzani, Rita Cucchiara

Auto-TLDR; RefiNet: A Multi-stage Framework for 3D Human Pose Estimation
Hierarchical Routing Mixture of Experts
Wenbo Zhao, Yang Gao, Shahan Ali Memon, Bhiksha Raj, Rita Singh
Auto-TLDR; A Binary Tree-structured Hierarchical Routing Mixture of Experts for Regression
Abstract Slides Poster Similar
Learning Semantic Representations Via Joint 3D Face Reconstruction and Facial Attribute Estimation
Zichun Weng, Youjun Xiang, Xianfeng Li, Juntao Liang, Wanliang Huo, Yuli Fu
Auto-TLDR; Joint Framework for 3D Face Reconstruction with Facial Attribute Estimation
Abstract Slides Poster Similar
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Multi-Attribute Regression Network for Face Reconstruction
Auto-TLDR; A Multi-Attribute Regression Network for Face Reconstruction
Abstract Slides Poster Similar
Rotational Adjoint Methods for Learning-Free 3D Human Pose Estimation from IMU Data
Caterina Emilia Agelide Buizza, Yiannis Demiris

Auto-TLDR; Learning-free 3D Human Pose Estimation from Inertial Measurement Unit Data
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Sequential Non-Rigid Factorisation for Head Pose Estimation
Stefania Cristina, Kenneth Patrick Camilleri
Auto-TLDR; Sequential Shape-and-Motion Factorisation for Head Pose Estimation in Eye-Gaze Tracking
Abstract Slides Poster Similar
Simple Multi-Resolution Representation Learning for Human Pose Estimation
Trung Tran Quang, Van Giang Nguyen, Daeyoung Kim
Auto-TLDR; Multi-resolution Heatmap Learning for Human Pose Estimation
Abstract Slides Poster Similar
Do We Really Need Scene-Specific Pose Encoders?
Auto-TLDR; Pose Regression Using Deep Convolutional Networks for Visual Similarity
Confidence Calibration for Deep Renal Biopsy Immunofluorescence Image Classification
Federico Pollastri, Juan Maroñas, Federico Bolelli, Giulia Ligabue, Roberto Paredes, Riccardo Magistroni, Costantino Grana
Auto-TLDR; A Probabilistic Convolutional Neural Network for Immunofluorescence Classification in Renal Biopsy
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Self-Supervised Detection and Pose Estimation of Logistical Objects in 3D Sensor Data
Nikolas Müller, Jonas Stenzel, Jian-Jia Chen

Auto-TLDR; A self-supervised and fully automated deep learning approach for object pose estimation using simulated 3D data
Abstract Slides Poster Similar
A Multi-Task Neural Network for Action Recognition with 3D Key-Points
Rongxiao Tang, Wang Luyang, Zhenhua Guo
Auto-TLDR; Multi-task Neural Network for Action Recognition and 3D Human Pose Estimation
Abstract Slides Poster Similar
Cost Volume Refinement for Depth Prediction
João L. Cardoso, Nuno Goncalves, Michael Wimmer

Auto-TLDR; Refining the Cost Volume for Depth Prediction from Light Field Cameras
Abstract Slides Poster Similar
Modeling the Distribution of Normal Data in Pre-Trained Deep Features for Anomaly Detection
Oliver Rippel, Patrick Mertens, Dorit Merhof
Auto-TLDR; Deep Feature Representations for Anomaly Detection in Images
Abstract Slides Poster Similar
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
A Grid-Based Representation for Human Action Recognition
Soufiane Lamghari, Guillaume-Alexandre Bilodeau, Nicolas Saunier

Auto-TLDR; GRAR: Grid-based Representation for Action Recognition in Videos
Abstract Slides Poster Similar
Shape Consistent 2D Keypoint Estimation under Domain Shift
Levi Vasconcelos, Massimiliano Mancini, Davide Boscaini, Barbara Caputo, Elisa Ricci

Auto-TLDR; Deep Adaptation for Keypoint Prediction under Domain Shift
Abstract Slides Poster Similar
Pose-Robust Face Recognition by Deep Meta Capsule Network-Based Equivariant Embedding
Fangyu Wu, Jeremy Simon Smith, Wenjin Lu, Bailing Zhang
Auto-TLDR; Deep Meta Capsule Network-based Equivariant Embedding Model for Pose-Robust Face Recognition
Modeling Long-Term Interactions to Enhance Action Recognition
Alejandro Cartas, Petia Radeva, Mariella Dimiccoli
Auto-TLDR; A Hierarchical Long Short-Term Memory Network for Action Recognition in Egocentric Videos
Abstract Slides Poster Similar
Neuron-Based Network Pruning Based on Majority Voting
Ali Alqahtani, Xianghua Xie, Ehab Essa, Mark W. Jones
Auto-TLDR; Large-Scale Neural Network Pruning using Majority Voting
Abstract Slides Poster Similar
Multi-Camera Sports Players 3D Localization with Identification Reasoning
Yukun Yang, Ruiheng Zhang, Wanneng Wu, Yu Peng, Xu Min

Auto-TLDR; Probabilistic and Identified Occupancy Map for Sports Players 3D Localization
Abstract Slides Poster Similar
DmifNet:3D Shape Reconstruction Based on Dynamic Multi-Branch Information Fusion
Auto-TLDR; DmifNet: Dynamic Multi-branch Information Fusion Network for 3D Shape Reconstruction from a Single-View Image
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
Learning to Implicitly Represent 3D Human Body from Multi-Scale Features and Multi-View Images
Zhongguo Li, Magnus Oskarsson, Anders Heyden
Auto-TLDR; Reconstruction of 3D human bodies from multi-view images using multi-stage end-to-end neural networks
Abstract Slides Poster Similar
Learning to Segment Clustered Amoeboid Cells from Brightfield Microscopy Via Multi-Task Learning with Adaptive Weight Selection
Rituparna Sarkar, Suvadip Mukherjee, Elisabeth Labruyere, Jean-Christophe Olivo-Marin
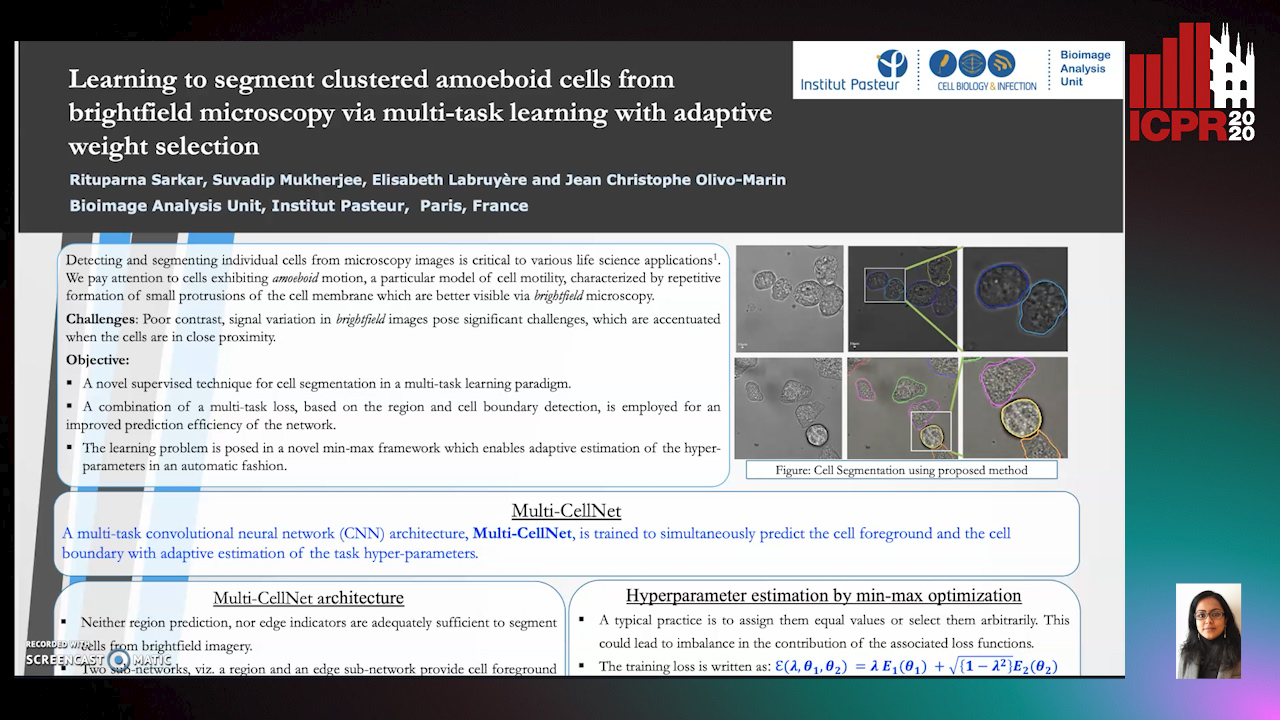
Auto-TLDR; Supervised Cell Segmentation from Microscopy Images using Multi-task Learning in a Multi-Task Learning Paradigm
Deep Transformation Models: Tackling Complex Regression Problems with Neural Network Based Transformation Models
Beate Sick, Torsten Hothorn, Oliver Dürr
Auto-TLDR; A Deep Transformation Model for Probabilistic Regression
Abstract Slides Poster Similar
Explainable Online Validation of Machine Learning Models for Practical Applications
Wolfgang Fuhl, Yao Rong, Thomas Motz, Michael Scheidt, Andreas Markus Hartel, Andreas Koch, Enkelejda Kasneci
Auto-TLDR; A Reformulation of Regression and Classification for Machine Learning Algorithm Validation
Abstract Slides Poster Similar
Separation of Aleatoric and Epistemic Uncertainty in Deterministic Deep Neural Networks
Denis Huseljic, Bernhard Sick, Marek Herde, Daniel Kottke
Auto-TLDR; AE-DNN: Modeling Uncertainty in Deep Neural Networks
Abstract Slides Poster Similar
Exploring Severe Occlusion: Multi-Person 3D Pose Estimation with Gated Convolution
Renshu Gu, Gaoang Wang, Jenq-Neng Hwang

Auto-TLDR; 3D Human Pose Estimation for Multi-Human Videos with Occlusion
Audio-Video Detection of the Active Speaker in Meetings
Francisco Madrigal, Frederic Lerasle, Lionel Pibre, Isabelle Ferrané

Auto-TLDR; Active Speaker Detection with Visual and Contextual Information from Meeting Context
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Spatial-Related and Scale-Aware Network for Crowd Counting
Lei Li, Yuan Dong, Hongliang Bai
Auto-TLDR; Spatial Attention for Crowd Counting
Abstract Slides Poster Similar
Silhouette Body Measurement Benchmarks
Song Yan, Johan Wirta, Joni-Kristian Kamarainen
Auto-TLDR; BODY-fit: A Realistic 3D Body Measurement Dataset for Anthropometric Measurement
Abstract Slides Poster Similar