DmifNet:3D Shape Reconstruction Based on Dynamic Multi-Branch Information Fusion
Auto-TLDR; DmifNet: Dynamic Multi-branch Information Fusion Network for 3D Shape Reconstruction from a Single-View Image
Similar papers
Towards Efficient 3D Point Cloud Scene Completion Via Novel Depth View Synthesis
Haiyan Wang, Liang Yang, Xuejian Rong, Ying-Li Tian

Auto-TLDR; 3D Point Cloud Completion with Depth View Synthesis and Depth View synthesis
Learning to Implicitly Represent 3D Human Body from Multi-Scale Features and Multi-View Images
Zhongguo Li, Magnus Oskarsson, Anders Heyden
Auto-TLDR; Reconstruction of 3D human bodies from multi-view images using multi-stage end-to-end neural networks
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Multi-Attribute Regression Network for Face Reconstruction
Auto-TLDR; A Multi-Attribute Regression Network for Face Reconstruction
Abstract Slides Poster Similar
Cross-Regional Attention Network for Point Cloud Completion

Auto-TLDR; Learning-based Point Cloud Repair with Graph Convolution
Abstract Slides Poster Similar
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar
EdgeNet: Semantic Scene Completion from a Single RGB-D Image
Aloisio Dourado, Teofilo De Campos, Adrian Hilton, Hansung Kim

Auto-TLDR; Semantic Scene Completion using 3D Depth and RGB Information
Abstract Slides Poster Similar
A Multi-Task Neural Network for Action Recognition with 3D Key-Points
Rongxiao Tang, Wang Luyang, Zhenhua Guo
Auto-TLDR; Multi-task Neural Network for Action Recognition and 3D Human Pose Estimation
Abstract Slides Poster Similar
Learning Interpretable Representation for 3D Point Clouds
Feng-Guang Su, Ci-Siang Lin, Yu-Chiang Frank Wang
Auto-TLDR; Disentangling Body-type and Pose Information from 3D Point Clouds Using Adversarial Learning
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
Face Super-Resolution Network with Incremental Enhancement of Facial Parsing Information
Shuang Liu, Chengyi Xiong, Zhirong Gao
Auto-TLDR; Learning-based Face Super-Resolution with Incremental Boosting Facial Parsing Information
Abstract Slides Poster Similar
3D Semantic Labeling of Photogrammetry Meshes Based on Active Learning
Mengqi Rong, Shuhan Shen, Zhanyi Hu

Auto-TLDR; 3D Semantic Expression of Urban Scenes Based on Active Learning
Abstract Slides Poster Similar
Learning Semantic Representations Via Joint 3D Face Reconstruction and Facial Attribute Estimation
Zichun Weng, Youjun Xiang, Xianfeng Li, Juntao Liang, Wanliang Huo, Yuli Fu
Auto-TLDR; Joint Framework for 3D Face Reconstruction with Facial Attribute Estimation
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
MANet: Multimodal Attention Network Based Point-View Fusion for 3D Shape Recognition
Yaxin Zhao, Jichao Jiao, Ning Li
Auto-TLDR; Fusion Network for 3D Shape Recognition based on Multimodal Attention Mechanism
Abstract Slides Poster Similar
Deep Space Probing for Point Cloud Analysis
Yirong Yang, Bin Fan, Yongcheng Liu, Hua Lin, Jiyong Zhang, Xin Liu, 蔡鑫宇 蔡鑫宇, Shiming Xiang, Chunhong Pan

Auto-TLDR; SPCNN: Space Probing Convolutional Neural Network for Point Cloud Analysis
Abstract Slides Poster Similar
Joint Face Alignment and 3D Face Reconstruction with Efficient Convolution Neural Networks
Keqiang Li, Huaiyu Wu, Xiuqin Shang, Zhen Shen, Gang Xiong, Xisong Dong, Bin Hu, Fei-Yue Wang
Auto-TLDR; Mobile-FRNet: Efficient 3D Morphable Model Alignment and 3D Face Reconstruction from a Single 2D Facial Image
Abstract Slides Poster Similar
PointSpherical: Deep Shape Context for Point Cloud Learning in Spherical Coordinates
Hua Lin, Bin Fan, Yongcheng Liu, Yirong Yang, Zheng Pan, Jianbo Shi, Chunhong Pan, Huiwen Xie

Auto-TLDR; Spherical Hierarchical Modeling of 3D Point Cloud
Abstract Slides Poster Similar
Delivering Meaningful Representation for Monocular Depth Estimation
Doyeon Kim, Donggyu Joo, Junmo Kim

Auto-TLDR; Monocular Depth Estimation by Bridging the Context between Encoding and Decoding
Abstract Slides Poster Similar
PEAN: 3D Hand Pose Estimation Adversarial Network
Linhui Sun, Yifan Zhang, Jing Lu, Jian Cheng, Hanqing Lu
Auto-TLDR; PEAN: 3D Hand Pose Estimation with Adversarial Learning Framework
Abstract Slides Poster Similar
Free-Form Image Inpainting Via Contrastive Attention Network
Xin Ma, Xiaoqiang Zhou, Huaibo Huang, Zhenhua Chai, Xiaolin Wei, Ran He
Auto-TLDR; Self-supervised Siamese inference for image inpainting
MixedFusion: 6D Object Pose Estimation from Decoupled RGB-Depth Features
Hangtao Feng, Lu Zhang, Xu Yang, Zhiyong Liu

Auto-TLDR; MixedFusion: Combining Color and Point Clouds for 6D Pose Estimation
Abstract Slides Poster Similar
DAPC: Domain Adaptation People Counting Via Style-Level Transfer Learning and Scene-Aware Estimation
Na Jiang, Xingsen Wen, Zhiping Shi
Auto-TLDR; Domain Adaptation People counting via Style-Level Transfer Learning and Scene-Aware Estimation
Abstract Slides Poster Similar
Machine-Learned Regularization and Polygonization of Building Segmentation Masks
Stefano Zorzi, Ksenia Bittner, Friedrich Fraundorfer

Auto-TLDR; Automatic Regularization and Polygonization of Building Segmentation masks using Generative Adversarial Network
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Small Object Detection by Generative and Discriminative Learning
Yi Gu, Jie Li, Chentao Wu, Weijia Jia, Jianping Chen
Auto-TLDR; Generative and Discriminative Learning for Small Object Detection
Abstract Slides Poster Similar
Detail Fusion GAN: High-Quality Translation for Unpaired Images with GAN-Based Data Augmentation
Ling Li, Yaochen Li, Chuan Wu, Hang Dong, Peilin Jiang, Fei Wang

Auto-TLDR; Data Augmentation with GAN-based Generative Adversarial Network
Abstract Slides Poster Similar
Orthographic Projection Linear Regression for Single Image 3D Human Pose Estimation
Yahui Zhang, Shaodi You, Theo Gevers

Auto-TLDR; A Deep Neural Network for 3D Human Pose Estimation from a Single 2D Image in the Wild
Abstract Slides Poster Similar
Unsupervised 3D Human Pose Estimation in Multi-view-multi-pose Video
Cheng Sun, Diego Thomas, Hiroshi Kawasaki
Auto-TLDR; Unsupervised 3D Human Pose Estimation from 2D Videos Using Generative Adversarial Network
Abstract Slides Poster Similar
Detail-Revealing Deep Low-Dose CT Reconstruction
Xinchen Ye, Yuyao Xu, Rui Xu, Shoji Kido, Noriyuki Tomiyama
Auto-TLDR; A Dual-branch Aggregation Network for Low-Dose CT Reconstruction
Abstract Slides Poster Similar
A Prototype-Based Generalized Zero-Shot Learning Framework for Hand Gesture Recognition
Jinting Wu, Yujia Zhang, Xiao-Guang Zhao
Auto-TLDR; Generalized Zero-Shot Learning for Hand Gesture Recognition
Abstract Slides Poster Similar
PC-Net: A Deep Network for 3D Point Clouds Analysis
Zhuo Chen, Tao Guan, Yawei Luo, Yuesong Wang

Auto-TLDR; PC-Net: A Hierarchical Neural Network for 3D Point Clouds Analysis
Abstract Slides Poster Similar
Dynamic Guided Network for Monocular Depth Estimation
Xiaoxia Xing, Yinghao Cai, Yiping Yang, Dayong Wen

Auto-TLDR; DGNet: Dynamic Guidance Upsampling for Self-attention-Decoding for Monocular Depth Estimation
Abstract Slides Poster Similar
FourierNet: Compact Mask Representation for Instance Segmentation Using Differentiable Shape Decoders
Hamd Ul Moqeet Riaz, Nuri Benbarka, Andreas Zell

Auto-TLDR; FourierNet: A Single shot, anchor-free, fully convolutional instance segmentation method that predicts a shape vector
Abstract Slides Poster Similar
Residual Fractal Network for Single Image Super Resolution by Widening and Deepening
Jiahang Gu, Zhaowei Qu, Xiaoru Wang, Jiawang Dan, Junwei Sun
Auto-TLDR; Residual fractal convolutional network for single image super-resolution
Abstract Slides Poster Similar
Boundary-Aware Graph Convolution for Semantic Segmentation
Hanzhe Hu, Jinshi Cui, Jinshi Hongbin Zha

Auto-TLDR; Boundary-Aware Graph Convolution for Semantic Segmentation
Abstract Slides Poster Similar
Revisiting Sequence-To-Sequence Video Object Segmentation with Multi-Task Loss and Skip-Memory
Fatemeh Azimi, Benjamin Bischke, Sebastian Palacio, Federico Raue, Jörn Hees, Andreas Dengel

Auto-TLDR; Sequence-to-Sequence Learning for Video Object Segmentation
Abstract Slides Poster Similar
Joint Supervised and Self-Supervised Learning for 3D Real World Challenges
Antonio Alliegro, Davide Boscaini, Tatiana Tommasi

Auto-TLDR; Self-supervision for 3D Shape Classification and Segmentation in Point Clouds
Sample-Aware Data Augmentor for Scene Text Recognition
Guanghao Meng, Tao Dai, Shudeng Wu, Bin Chen, Jian Lu, Yong Jiang, Shutao Xia
Auto-TLDR; Sample-Aware Data Augmentation for Scene Text Recognition
Abstract Slides Poster Similar
DEN: Disentangling and Exchanging Network for Depth Completion
You-Feng Wu, Vu-Hoang Tran, Ting-Wei Chang, Wei-Chen Chiu, Ching-Chun Huang
Auto-TLDR; Disentangling and Exchanging Network for Depth Completion
Manual-Label Free 3D Detection Via an Open-Source Simulator
Zhen Yang, Chi Zhang, Zhaoxiang Zhang, Huiming Guo

Auto-TLDR; DA-VoxelNet: A Novel Domain Adaptive VoxelNet for LIDAR-based 3D Object Detection
Abstract Slides Poster Similar
Boosting High-Level Vision with Joint Compression Artifacts Reduction and Super-Resolution
Xiaoyu Xiang, Qian Lin, Jan Allebach
Auto-TLDR; A Context-Aware Joint CAR and SR Neural Network for High-Resolution Text Recognition and Face Detection
Abstract Slides Poster Similar
Shape Consistent 2D Keypoint Estimation under Domain Shift
Levi Vasconcelos, Massimiliano Mancini, Davide Boscaini, Barbara Caputo, Elisa Ricci

Auto-TLDR; Deep Adaptation for Keypoint Prediction under Domain Shift
Abstract Slides Poster Similar
Coarse to Fine: Progressive and Multi-Task Learning for Salient Object Detection
Dong-Goo Kang, Sangwoo Park, Joonki Paik
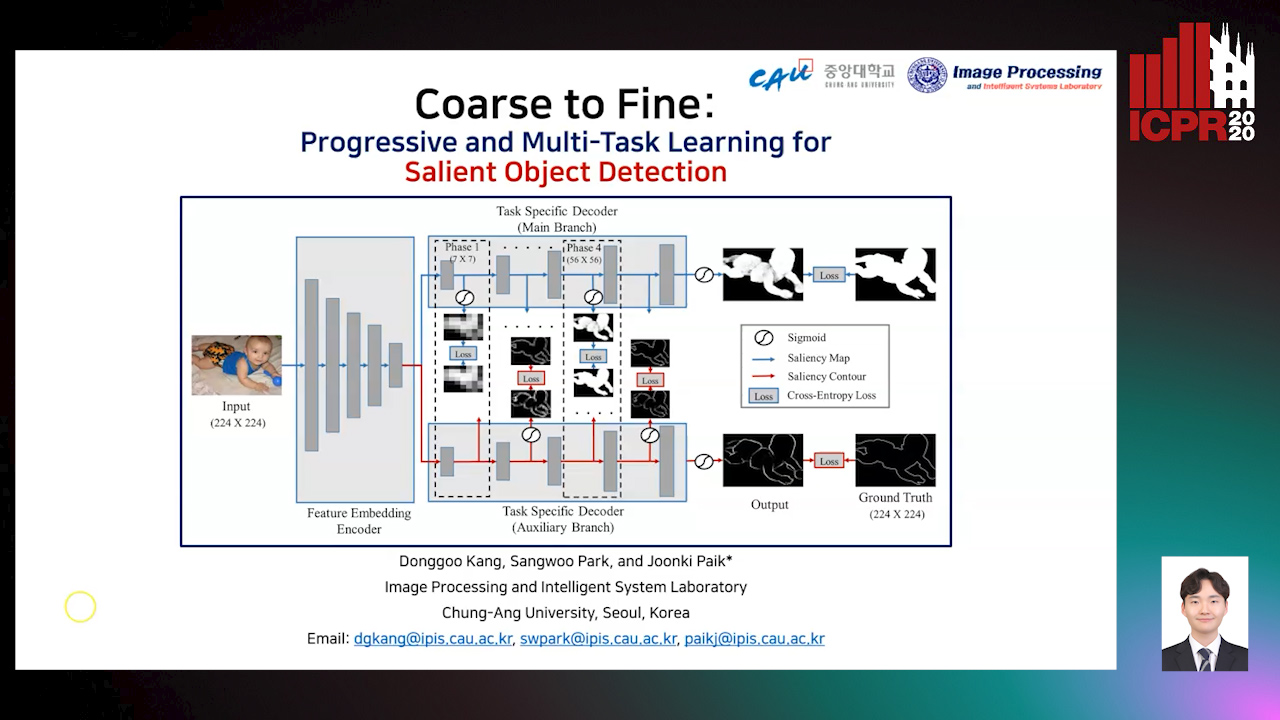
Auto-TLDR; Progressive and mutl-task learning scheme for salient object detection
Abstract Slides Poster Similar
Multi-Resolution Fusion and Multi-Scale Input Priors Based Crowd Counting
Usman Sajid, Wenchi Ma, Guanghui Wang
Auto-TLDR; Multi-resolution Fusion Based End-to-End Crowd Counting in Still Images
Abstract Slides Poster Similar
End-To-End Multi-Task Learning for Lung Nodule Segmentation and Diagnosis
Wei Chen, Qiuli Wang, Dan Yang, Xiaohong Zhang, Chen Liu, Yucong Li
Auto-TLDR; A novel multi-task framework for lung nodule diagnosis based on deep learning and medical features
Dynamic Low-Light Image Enhancement for Object Detection Via End-To-End Training
Haifeng Guo, Yirui Wu, Tong Lu
Auto-TLDR; Object Detection using Low-Light Image Enhancement for End-to-End Training
Abstract Slides Poster Similar
Wavelet Attention Embedding Networks for Video Super-Resolution
Young-Ju Choi, Young-Woon Lee, Byung-Gyu Kim
Auto-TLDR; Wavelet Attention Embedding Network for Video Super-Resolution
Abstract Slides Poster Similar