Manual-Label Free 3D Detection Via an Open-Source Simulator
Zhen Yang,
Chi Zhang,
Zhaoxiang Zhang,
Huiming Guo

Auto-TLDR; DA-VoxelNet: A Novel Domain Adaptive VoxelNet for LIDAR-based 3D Object Detection
Similar papers
Foreground-Focused Domain Adaption for Object Detection
Auto-TLDR; Unsupervised Domain Adaptation for Unsupervised Object Detection
Cross-Domain Semantic Segmentation of Urban Scenes Via Multi-Level Feature Alignment
Bin Zhang, Shengjie Zhao, Rongqing Zhang
Auto-TLDR; Cross-Domain Semantic Segmentation Using Generative Adversarial Networks
Abstract Slides Poster Similar
PointDrop: Improving Object Detection from Sparse Point Clouds Via Adversarial Data Augmentation
Wenxin Ma, Jian Chen, Qing Du, Wei Jia

Auto-TLDR; PointDrop: Improving Robust 3D Object Detection to Sparse Point Clouds
Abstract Slides Poster Similar
Sensor-Independent Pedestrian Detection for Personal Mobility Vehicles in Walking Space Using Dataset Generated by Simulation
Takahiro Shimizu, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Motoki Shino

Auto-TLDR; CosPointPillars: A 3D Object Detection Method for Pedestrian Detection in Walking Spaces
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Joint Supervised and Self-Supervised Learning for 3D Real World Challenges
Antonio Alliegro, Davide Boscaini, Tatiana Tommasi

Auto-TLDR; Self-supervision for 3D Shape Classification and Segmentation in Point Clouds
Shape Consistent 2D Keypoint Estimation under Domain Shift
Levi Vasconcelos, Massimiliano Mancini, Davide Boscaini, Barbara Caputo, Elisa Ricci

Auto-TLDR; Deep Adaptation for Keypoint Prediction under Domain Shift
Abstract Slides Poster Similar
Unsupervised Domain Adaptation with Multiple Domain Discriminators and Adaptive Self-Training
Teo Spadotto, Marco Toldo, Umberto Michieli, Pietro Zanuttigh

Auto-TLDR; Unsupervised Domain Adaptation for Semantic Segmentation of Urban Scenes
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Unsupervised Multi-Task Domain Adaptation
Auto-TLDR; Unsupervised Domain Adaptation with Multi-task Learning for Image Recognition
Abstract Slides Poster Similar
DAPC: Domain Adaptation People Counting Via Style-Level Transfer Learning and Scene-Aware Estimation
Na Jiang, Xingsen Wen, Zhiping Shi
Auto-TLDR; Domain Adaptation People counting via Style-Level Transfer Learning and Scene-Aware Estimation
Abstract Slides Poster Similar
DeepBEV: A Conditional Adversarial Network for Bird’s Eye View Generation
Auto-TLDR; A Generative Adversarial Network for Semantic Object Representation in Autonomous Vehicles
Abstract Slides Poster Similar
Unsupervised Domain Adaptation for Object Detection in Cultural Sites
Giovanni Pasqualino, Antonino Furnari, Giovanni Maria Farinella
Auto-TLDR; Unsupervised Domain Adaptation for Object Detection in Cultural Sites
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
S-VoteNet: Deep Hough Voting with Spherical Proposal for 3D Object Detection
Yanxian Chen, Huimin Ma, Xi Li, Xiong Luo

Auto-TLDR; S-VoteNet: 3D Object Detection with Spherical Bounded Box Prediction
Abstract Slides Poster Similar
MagnifierNet: Learning Efficient Small-Scale Pedestrian Detector towards Multiple Dense Regions
Qi Cheng, Mingqin Chen, Yingjie Wu, Fei Chen, Shiping Lin

Auto-TLDR; MagnifierNet: A Simple but Effective Small-Scale Pedestrian Detection Towards Multiple Dense Regions
Abstract Slides Poster Similar
Human Segmentation with Dynamic LiDAR Data
Tao Zhong, Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi

Auto-TLDR; Spatiotemporal Neural Network for Human Segmentation with Dynamic Point Clouds
Self-Training for Domain Adaptive Scene Text Detection
Yudi Chen, Wei Wang, Yu Zhou, Fei Yang, Dongbao Yang, Weiping Wang
Auto-TLDR; A self-training framework for image-based scene text detection
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Teacher-Student Competition for Unsupervised Domain Adaptation
Ruixin Xiao, Zhilei Liu, Baoyuan Wu
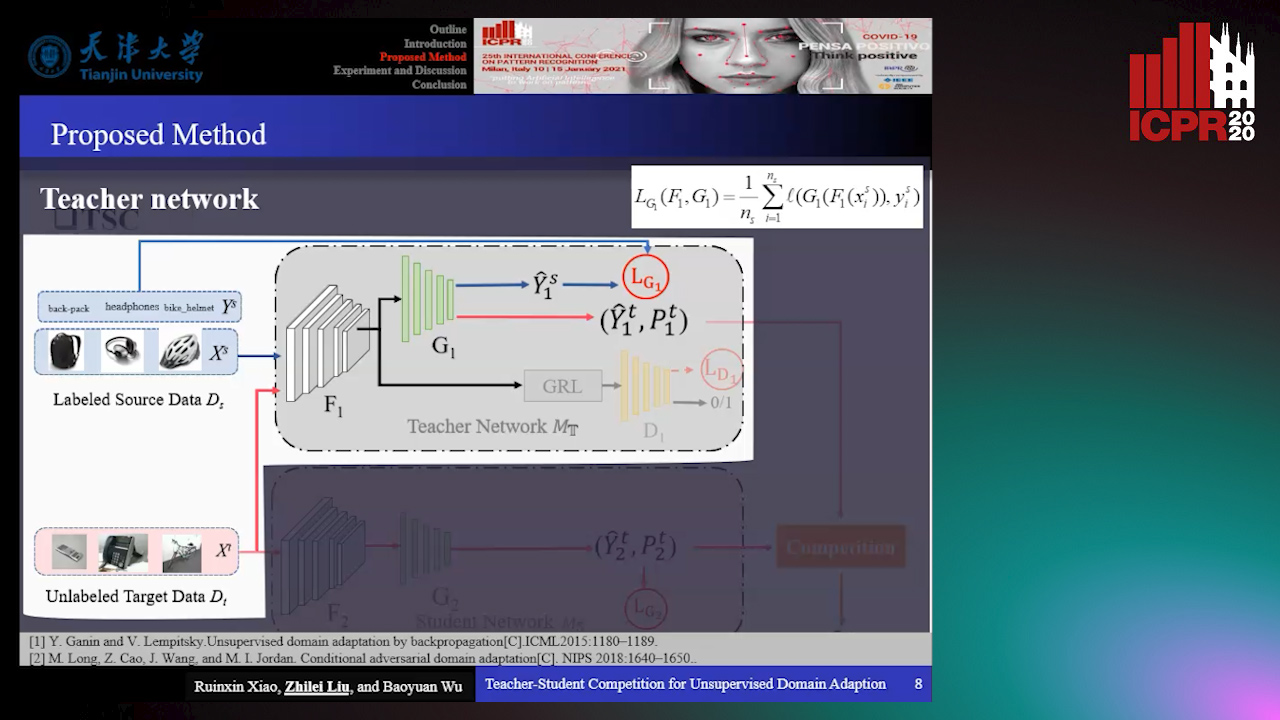
Auto-TLDR; Unsupervised Domain Adaption with Teacher-Student Competition
Abstract Slides Poster Similar
A Unified Framework for Distance-Aware Domain Adaptation
Fei Wang, Youdong Ding, Huan Liang, Yuzhen Gao, Wenqi Che
Auto-TLDR; distance-aware domain adaptation
Abstract Slides Poster Similar
Unsupervised Domain Adaptation for Person Re-Identification through Source-Guided Pseudo-Labeling
Fabian Dubourvieux, Romaric Audigier, Angélique Loesch, Ainouz-Zemouche Samia, Stéphane Canu
Auto-TLDR; Pseudo-labeling for Unsupervised Domain Adaptation for Person Re-Identification
Abstract Slides Poster Similar
Temporal Pulses Driven Spiking Neural Network for Time and Power Efficient Object Recognition in Autonomous Driving
Wei Wang, Shibo Zhou, Jingxi Li, Xiaohua Li, Junsong Yuan, Zhanpeng Jin

Auto-TLDR; Spiking Neural Network for Real-Time Object Recognition on Temporal LiDAR Pulses
Abstract Slides Poster Similar
Open Set Domain Recognition Via Attention-Based GCN and Semantic Matching Optimization
Xinxing He, Yuan Yuan, Zhiyu Jiang

Auto-TLDR; Attention-based GCN and Semantic Matching Optimization for Open Set Domain Recognition
Abstract Slides Poster Similar
PointSpherical: Deep Shape Context for Point Cloud Learning in Spherical Coordinates
Hua Lin, Bin Fan, Yongcheng Liu, Yirong Yang, Zheng Pan, Jianbo Shi, Chunhong Pan, Huiwen Xie

Auto-TLDR; Spherical Hierarchical Modeling of 3D Point Cloud
Abstract Slides Poster Similar
Domain Generalized Person Re-Identification Via Cross-Domain Episodic Learning
Ci-Siang Lin, Yuan Chia Cheng, Yu-Chiang Frank Wang
Auto-TLDR; Domain-Invariant Person Re-identification with Episodic Learning
Abstract Slides Poster Similar
Ghost Target Detection in 3D Radar Data Using Point Cloud Based Deep Neural Network
Mahdi Chamseddine, Jason Rambach, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Point Based Deep Learning for Ghost Target Detection in 3D Radar Point Clouds
Abstract Slides Poster Similar
Enhanced Vote Network for 3D Object Detection in Point Clouds

Auto-TLDR; A Vote Feature Enhancement Network for 3D Bounding Box Prediction
Abstract Slides Poster Similar
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
Efficient Shadow Detection and Removal Using Synthetic Data with Domain Adaptation
Rui Guo, Babajide Ayinde, Hao Sun
Auto-TLDR; Shadow Detection and Removal with Domain Adaptation and Synthetic Image Database
Energy-Constrained Self-Training for Unsupervised Domain Adaptation
Xiaofeng Liu, Xiongchang Liu, Bo Hu, Jun Lu, Jonghye Woo, Jane You
Auto-TLDR; Unsupervised Domain Adaptation with Energy Function Minimization
Abstract Slides Poster Similar
A Simple Domain Shifting Network for Generating Low Quality Images
Guruprasad Hegde, Avinash Nittur Ramesh, Kanchana Vaishnavi Gandikota, Michael Möller, Roman Obermaisser
Auto-TLDR; Robotic Image Classification Using Quality degrading networks
Abstract Slides Poster Similar
Self-Supervised Detection and Pose Estimation of Logistical Objects in 3D Sensor Data
Nikolas Müller, Jonas Stenzel, Jian-Jia Chen

Auto-TLDR; A self-supervised and fully automated deep learning approach for object pose estimation using simulated 3D data
Abstract Slides Poster Similar
Enlarging Discriminative Power by Adding an Extra Class in Unsupervised Domain Adaptation
Hai Tran, Sumyeong Ahn, Taeyoung Lee, Yung Yi
Auto-TLDR; Unsupervised Domain Adaptation using Artificial Classes
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Class Conditional Alignment for Partial Domain Adaptation
Mohsen Kheirandishfard, Fariba Zohrizadeh, Farhad Kamangar
Auto-TLDR; Multi-class Adversarial Adaptation for Partial Domain Adaptation
Abstract Slides Poster Similar
MixedFusion: 6D Object Pose Estimation from Decoupled RGB-Depth Features
Hangtao Feng, Lu Zhang, Xu Yang, Zhiyong Liu

Auto-TLDR; MixedFusion: Combining Color and Point Clouds for 6D Pose Estimation
Abstract Slides Poster Similar
3D Semantic Labeling of Photogrammetry Meshes Based on Active Learning
Mengqi Rong, Shuhan Shen, Zhanyi Hu

Auto-TLDR; 3D Semantic Expression of Urban Scenes Based on Active Learning
Abstract Slides Poster Similar
Self-Supervised Domain Adaptation with Consistency Training
Liang Xiao, Jiaolong Xu, Dawei Zhao, Zhiyu Wang, Li Wang, Yiming Nie, Bin Dai
Auto-TLDR; Unsupervised Domain Adaptation for Image Classification
Abstract Slides Poster Similar
Cross-Regional Attention Network for Point Cloud Completion

Auto-TLDR; Learning-based Point Cloud Repair with Graph Convolution
Abstract Slides Poster Similar
Rethinking Domain Generalization Baselines
Francesco Cappio Borlino, Antonio D'Innocente, Tatiana Tommasi
Auto-TLDR; Style Transfer Data Augmentation for Domain Generalization
Abstract Slides Poster Similar
Semi-Supervised Domain Adaptation Via Selective Pseudo Labeling and Progressive Self-Training
Auto-TLDR; Semi-supervised Domain Adaptation with Pseudo Labels
Abstract Slides Poster Similar
Progressive Unsupervised Domain Adaptation for Image-Based Person Re-Identification
Mingliang Yang, Da Huang, Jing Zhao
Auto-TLDR; Progressive Unsupervised Domain Adaptation for Person Re-Identification
Abstract Slides Poster Similar
Learning Low-Shot Generative Networks for Cross-Domain Data
Hsuan-Kai Kao, Cheng-Che Lee, Wei-Chen Chiu
Auto-TLDR; Learning Generators for Cross-Domain Data under Low-Shot Learning
Abstract Slides Poster Similar
Supervised Domain Adaptation Using Graph Embedding
Lukas Hedegaard, Omar Ali Sheikh-Omar, Alexandros Iosifidis
Auto-TLDR; Domain Adaptation from the Perspective of Multi-view Graph Embedding and Dimensionality Reduction
Abstract Slides Poster Similar
Quantifying the Use of Domain Randomization
Mohammad Ani, Hector Basevi, Ales Leonardis
Auto-TLDR; Evaluating Domain Randomization for Synthetic Image Generation by directly measuring the difference between realistic and synthetic data distributions
Abstract Slides Poster Similar