3D Semantic Labeling of Photogrammetry Meshes Based on Active Learning
Mengqi Rong,
Shuhan Shen,
Zhanyi Hu

Auto-TLDR; 3D Semantic Expression of Urban Scenes Based on Active Learning
Similar papers
PC-Net: A Deep Network for 3D Point Clouds Analysis
Zhuo Chen, Tao Guan, Yawei Luo, Yuesong Wang

Auto-TLDR; PC-Net: A Hierarchical Neural Network for 3D Point Clouds Analysis
Abstract Slides Poster Similar
Deep Space Probing for Point Cloud Analysis
Yirong Yang, Bin Fan, Yongcheng Liu, Hua Lin, Jiyong Zhang, Xin Liu, 蔡鑫宇 蔡鑫宇, Shiming Xiang, Chunhong Pan

Auto-TLDR; SPCNN: Space Probing Convolutional Neural Network for Point Cloud Analysis
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
MixedFusion: 6D Object Pose Estimation from Decoupled RGB-Depth Features
Hangtao Feng, Lu Zhang, Xu Yang, Zhiyong Liu

Auto-TLDR; MixedFusion: Combining Color and Point Clouds for 6D Pose Estimation
Abstract Slides Poster Similar
Progressive Scene Segmentation Based on Self-Attention Mechanism
Yunyi Pan, Yuan Gan, Kun Liu, Yan Zhang

Auto-TLDR; Two-Stage Semantic Scene Segmentation with Self-Attention
Abstract Slides Poster Similar
Towards Efficient 3D Point Cloud Scene Completion Via Novel Depth View Synthesis
Haiyan Wang, Liang Yang, Xuejian Rong, Ying-Li Tian

Auto-TLDR; 3D Point Cloud Completion with Depth View Synthesis and Depth View synthesis
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Machine-Learned Regularization and Polygonization of Building Segmentation Masks
Stefano Zorzi, Ksenia Bittner, Friedrich Fraundorfer

Auto-TLDR; Automatic Regularization and Polygonization of Building Segmentation masks using Generative Adversarial Network
Abstract Slides Poster Similar
UHRSNet: A Semantic Segmentation Network Specifically for Ultra-High-Resolution Images
Auto-TLDR; Ultra-High-Resolution Segmentation with Local and Global Feature Fusion
PointSpherical: Deep Shape Context for Point Cloud Learning in Spherical Coordinates
Hua Lin, Bin Fan, Yongcheng Liu, Yirong Yang, Zheng Pan, Jianbo Shi, Chunhong Pan, Huiwen Xie

Auto-TLDR; Spherical Hierarchical Modeling of 3D Point Cloud
Abstract Slides Poster Similar
Boundary-Aware Graph Convolution for Semantic Segmentation
Hanzhe Hu, Jinshi Cui, Jinshi Hongbin Zha

Auto-TLDR; Boundary-Aware Graph Convolution for Semantic Segmentation
Abstract Slides Poster Similar
Derivation of Geometrically and Semantically Annotated UAV Datasets at Large Scales from 3D City Models
Sidi Wu, Lukas Liebel, Marco Körner

Auto-TLDR; Large-Scale Dataset of Synthetic UAV Imagery for Geometric and Semantic Annotation
Abstract Slides Poster Similar
CT-UNet: An Improved Neural Network Based on U-Net for Building Segmentation in Remote Sensing Images
Huanran Ye, Sheng Liu, Kun Jin, Haohao Cheng
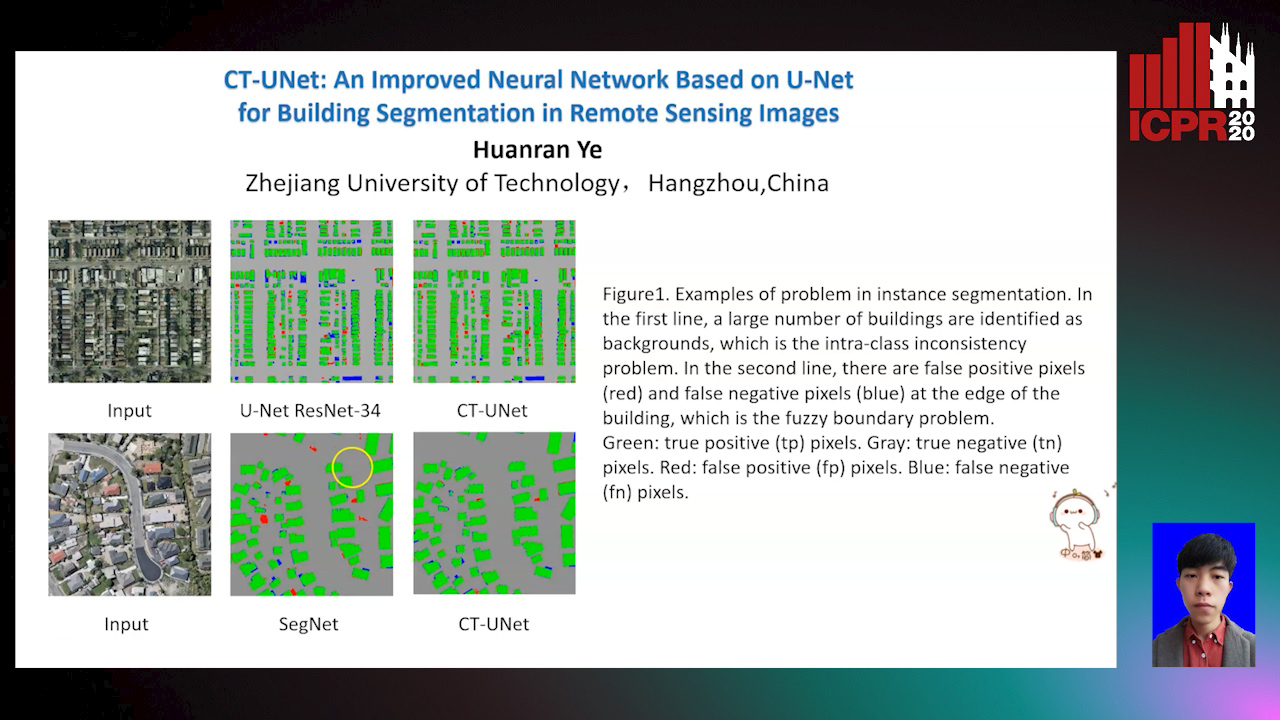
Auto-TLDR; Context-Transfer-UNet: A UNet-based Network for Building Segmentation in Remote Sensing Images
Abstract Slides Poster Similar
PS^2-Net: A Locally and Globally Aware Network for Point-Based Semantic Segmentation
Na Zhao, Tat Seng Chua, Gim Hee Lee

Auto-TLDR; PS2-Net: A Local and Globally Aware Deep Learning Framework for Semantic Segmentation on 3D Point Clouds
Abstract Slides Poster Similar
PSDNet: A Balanced Architecture of Accuracy and Parameters for Semantic Segmentation

Auto-TLDR; Pyramid Pooling Module with SE1Cblock and D2SUpsample Network (PSDNet)
Abstract Slides Poster Similar
DE-Net: Dilated Encoder Network for Automated Tongue Segmentation
Hui Tang, Bin Wang, Jun Zhou, Yongsheng Gao

Auto-TLDR; Automated Tongue Image Segmentation using De-Net
Abstract Slides Poster Similar
Facetwise Mesh Refinement for Multi-View Stereo
Andrea Romanoni, Matteo Matteucci
Auto-TLDR; Facetwise Refinement of Multi-View Stereo using Delaunay Triangulations
CASNet: Common Attribute Support Network for Image Instance and Panoptic Segmentation
Xiaolong Liu, Yuqing Hou, Anbang Yao, Yurong Chen, Keqiang Li

Auto-TLDR; Common Attribute Support Network for instance segmentation and panoptic segmentation
Abstract Slides Poster Similar
Human Segmentation with Dynamic LiDAR Data
Tao Zhong, Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi

Auto-TLDR; Spatiotemporal Neural Network for Human Segmentation with Dynamic Point Clouds
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Cross-Regional Attention Network for Point Cloud Completion

Auto-TLDR; Learning-based Point Cloud Repair with Graph Convolution
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Video Semantic Segmentation Using Deep Multi-View Representation Learning
Akrem Sellami, Salvatore Tabbone

Auto-TLDR; Deep Multi-view Representation Learning for Video Object Segmentation
Abstract Slides Poster Similar
Multi-Direction Convolution for Semantic Segmentation
Dehui Li, Zhiguo Cao, Ke Xian, Xinyuan Qi, Chao Zhang, Hao Lu
Auto-TLDR; Multi-Direction Convolution for Contextual Segmentation
Quantization in Relative Gradient Angle Domain for Building Polygon Estimation
Yuhao Chen, Yifan Wu, Linlin Xu, Alexander Wong
Auto-TLDR; Relative Gradient Angle Transform for Building Footprint Extraction from Remote Sensing Data
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
Incorporating Depth Information into Few-Shot Semantic Segmentation
Yifei Zhang, Desire Sidibe, Olivier Morel, Fabrice Meriaudeau

Auto-TLDR; RDNet: A Deep Neural Network for Few-shot Segmentation Using Depth Information
Abstract Slides Poster Similar
Global-Local Attention Network for Semantic Segmentation in Aerial Images
Minglong Li, Lianlei Shan, Weiqiang Wang

Auto-TLDR; GLANet: Global-Local Attention Network for Semantic Segmentation
Abstract Slides Poster Similar
MANet: Multimodal Attention Network Based Point-View Fusion for 3D Shape Recognition
Yaxin Zhao, Jichao Jiao, Ning Li
Auto-TLDR; Fusion Network for 3D Shape Recognition based on Multimodal Attention Mechanism
Abstract Slides Poster Similar
Real-Time Semantic Segmentation Via Region and Pixel Context Network
Yajun Li, Yazhou Liu, Quansen Sun
Auto-TLDR; A Dual Context Network for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Joint Face Alignment and 3D Face Reconstruction with Efficient Convolution Neural Networks
Keqiang Li, Huaiyu Wu, Xiuqin Shang, Zhen Shen, Gang Xiong, Xisong Dong, Bin Hu, Fei-Yue Wang
Auto-TLDR; Mobile-FRNet: Efficient 3D Morphable Model Alignment and 3D Face Reconstruction from a Single 2D Facial Image
Abstract Slides Poster Similar
EdgeNet: Semantic Scene Completion from a Single RGB-D Image
Aloisio Dourado, Teofilo De Campos, Adrian Hilton, Hansung Kim

Auto-TLDR; Semantic Scene Completion using 3D Depth and RGB Information
Abstract Slides Poster Similar
Enhanced Feature Pyramid Network for Semantic Segmentation
Mucong Ye, Ouyang Jinpeng, Ge Chen, Jing Zhang, Xiaogang Yu
Auto-TLDR; EFPN: Enhanced Feature Pyramid Network for Semantic Segmentation
Abstract Slides Poster Similar
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
A Benchmark Dataset for Segmenting Liver, Vasculature and Lesions from Large-Scale Computed Tomography Data
Bo Wang, Zhengqing Xu, Wei Xu, Qingsen Yan, Liang Zhang, Zheng You

Auto-TLDR; The Biggest Treatment-Oriented Liver Cancer Dataset for Segmentation
Abstract Slides Poster Similar
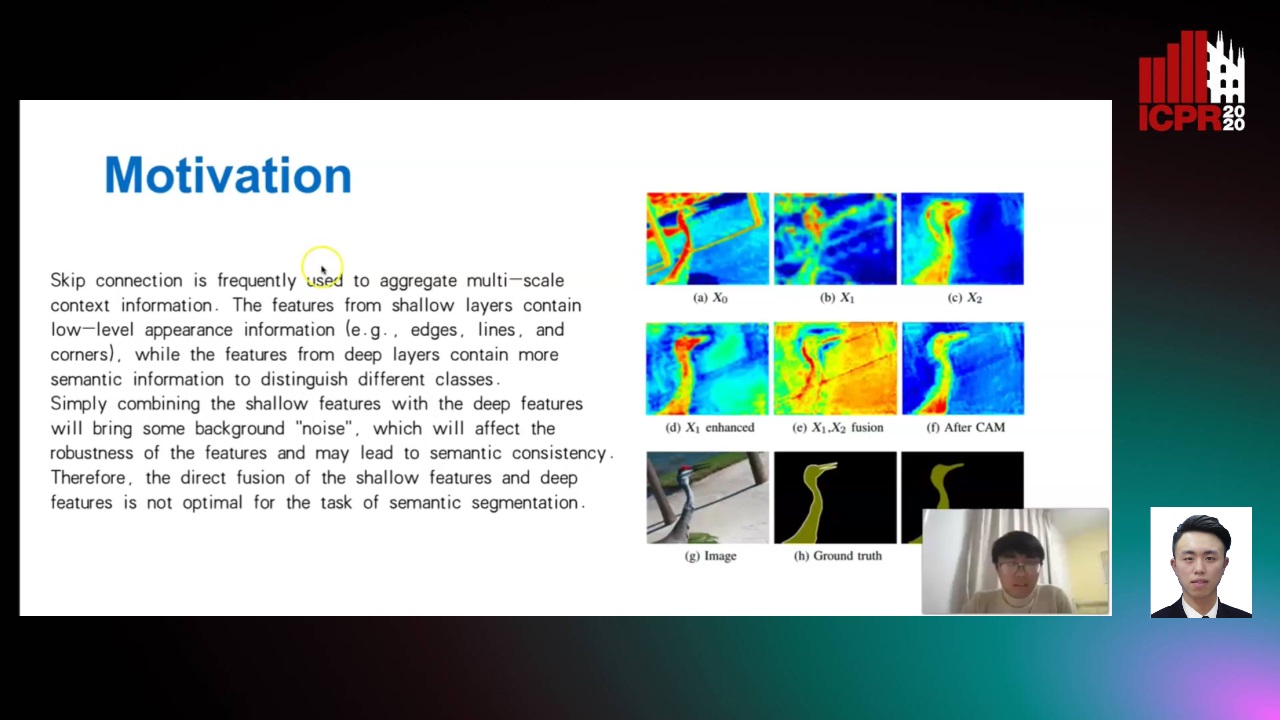
Semantic Segmentation Refinement Using Entropy and Boundary-guided Monte Carlo Sampling and Directed Regional Search
Zitang Sun, Sei-Ichiro Kamata, Ruojing Wang, Weili Chen
Auto-TLDR; Directed Region Search and Refinement for Semantic Segmentation
Abstract Slides Poster Similar
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
DA-RefineNet: Dual-Inputs Attention RefineNet for Whole Slide Image Segmentation
Ziqiang Li, Rentuo Tao, Qianrun Wu, Bin Li
Auto-TLDR; DA-RefineNet: A dual-inputs attention network for whole slide image segmentation
Abstract Slides Poster Similar
Directional Graph Networks with Hard Weight Assignments
Miguel Dominguez, Raymond Ptucha
Auto-TLDR; Hard Directional Graph Networks for Point Cloud Analysis
Abstract Slides Poster Similar
Cross-Domain Semantic Segmentation of Urban Scenes Via Multi-Level Feature Alignment
Bin Zhang, Shengjie Zhao, Rongqing Zhang
Auto-TLDR; Cross-Domain Semantic Segmentation Using Generative Adversarial Networks
Abstract Slides Poster Similar
Joint Semantic-Instance Segmentation of 3D Point Clouds: Instance Separation and Semantic Fusion
Auto-TLDR; Joint Semantic Segmentation and Instance Separation of 3D Point Clouds
Abstract Slides Poster Similar
Enhancing Semantic Segmentation of Aerial Images with Inhibitory Neurons
Ihsan Ullah, Sean Reilly, Michael Madden
Auto-TLDR; Lateral Inhibition in Deep Neural Networks for Object Recognition and Semantic Segmentation
Abstract Slides Poster Similar
FatNet: A Feature-Attentive Network for 3D Point Cloud Processing
Chaitanya Kaul, Nick Pears, Suresh Manandhar

Auto-TLDR; Feature-Attentive Neural Networks for Point Cloud Classification and Segmentation
Ordinal Depth Classification Using Region-Based Self-Attention
Minh Hieu Phan, Son Lam Phung, Abdesselam Bouzerdoum

Auto-TLDR; Region-based Self-Attention for Multi-scale Depth Estimation from a Single 2D Image
Abstract Slides Poster Similar
Deep Realistic Novel View Generation for City-Scale Aerial Images
Koundinya Nouduri, Ke Gao, Joshua Fraser, Shizeng Yao, Hadi Aliakbarpour, Filiz Bunyak, Kannappan Palaniappan
Auto-TLDR; End-to-End 3D Voxel Renderer for Multi-View Stereo Data Generation and Evaluation
Abstract Slides Poster Similar
Encoder-Decoder Based Convolutional Neural Networks with Multi-Scale-Aware Modules for Crowd Counting
Pongpisit Thanasutives, Ken-Ichi Fukui, Masayuki Numao, Boonserm Kijsirikul
Auto-TLDR; M-SFANet and M-SegNet for Crowd Counting Using Multi-Scale Fusion Networks
Abstract Slides Poster Similar