Quantization in Relative Gradient Angle Domain for Building Polygon Estimation
Yuhao Chen,
Yifan Wu,
Linlin Xu,
Alexander Wong
Auto-TLDR; Relative Gradient Angle Transform for Building Footprint Extraction from Remote Sensing Data
Similar papers
Machine-Learned Regularization and Polygonization of Building Segmentation Masks
Stefano Zorzi, Ksenia Bittner, Friedrich Fraundorfer

Auto-TLDR; Automatic Regularization and Polygonization of Building Segmentation masks using Generative Adversarial Network
Abstract Slides Poster Similar
CT-UNet: An Improved Neural Network Based on U-Net for Building Segmentation in Remote Sensing Images
Huanran Ye, Sheng Liu, Kun Jin, Haohao Cheng
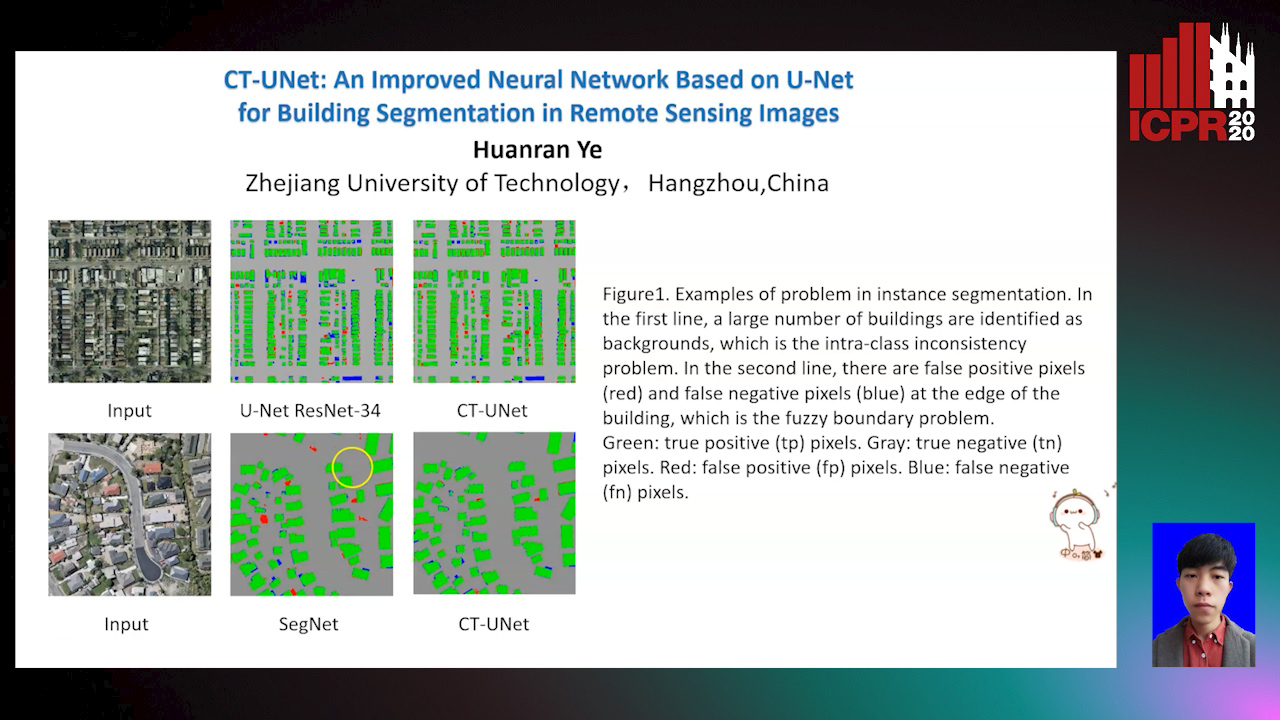
Auto-TLDR; Context-Transfer-UNet: A UNet-based Network for Building Segmentation in Remote Sensing Images
Abstract Slides Poster Similar
Global-Local Attention Network for Semantic Segmentation in Aerial Images
Minglong Li, Lianlei Shan, Weiqiang Wang

Auto-TLDR; GLANet: Global-Local Attention Network for Semantic Segmentation
Abstract Slides Poster Similar
RescueNet: Joint Building Segmentation and Damage Assessment from Satellite Imagery
Auto-TLDR; RescueNet: End-to-End Building Segmentation and Damage Classification for Humanitarian Aid and Disaster Response
Abstract Slides Poster Similar
3D Semantic Labeling of Photogrammetry Meshes Based on Active Learning
Mengqi Rong, Shuhan Shen, Zhanyi Hu

Auto-TLDR; 3D Semantic Expression of Urban Scenes Based on Active Learning
Abstract Slides Poster Similar
Walk the Lines: Object Contour Tracing CNN for Contour Completion of Ships
Auto-TLDR; Walk the Lines: A Convolutional Neural Network trained to follow object contours
Abstract Slides Poster Similar
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
Triplet-Path Dilated Network for Detection and Segmentation of General Pathological Images
Jiaqi Luo, Zhicheng Zhao, Fei Su, Limei Guo
Auto-TLDR; Triplet-path Network for One-Stage Object Detection and Segmentation in Pathological Images
End-To-End Deep Learning Methods for Automated Damage Detection in Extreme Events at Various Scales
Yongsheng Bai, Alper Yilmaz, Halil Sezen

Auto-TLDR; Robust Mask R-CNN for Crack Detection in Extreme Events
Abstract Slides Poster Similar
Derivation of Geometrically and Semantically Annotated UAV Datasets at Large Scales from 3D City Models
Sidi Wu, Lukas Liebel, Marco Körner

Auto-TLDR; Large-Scale Dataset of Synthetic UAV Imagery for Geometric and Semantic Annotation
Abstract Slides Poster Similar
Revisiting Sequence-To-Sequence Video Object Segmentation with Multi-Task Loss and Skip-Memory
Fatemeh Azimi, Benjamin Bischke, Sebastian Palacio, Federico Raue, Jörn Hees, Andreas Dengel

Auto-TLDR; Sequence-to-Sequence Learning for Video Object Segmentation
Abstract Slides Poster Similar
UHRSNet: A Semantic Segmentation Network Specifically for Ultra-High-Resolution Images
Auto-TLDR; Ultra-High-Resolution Segmentation with Local and Global Feature Fusion
Learning to Segment Clustered Amoeboid Cells from Brightfield Microscopy Via Multi-Task Learning with Adaptive Weight Selection
Rituparna Sarkar, Suvadip Mukherjee, Elisabeth Labruyere, Jean-Christophe Olivo-Marin
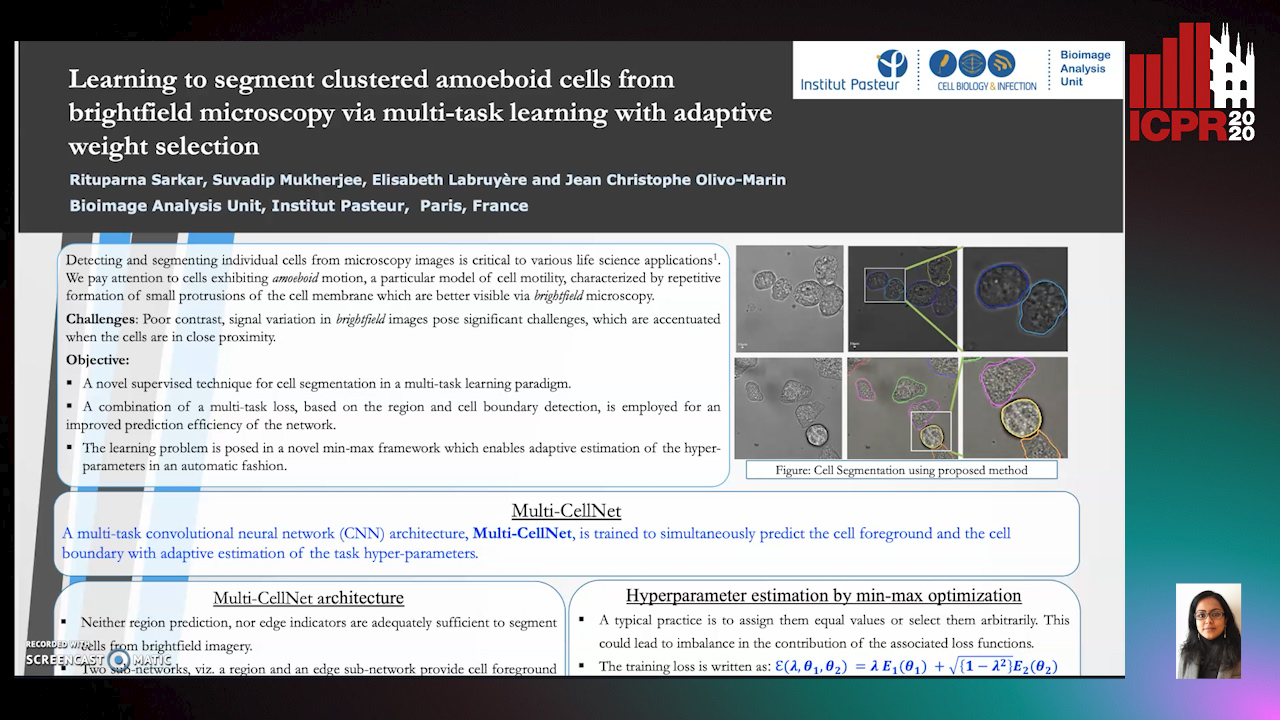
Auto-TLDR; Supervised Cell Segmentation from Microscopy Images using Multi-task Learning in a Multi-Task Learning Paradigm
Approach for Document Detection by Contours and Contrasts
Daniil Tropin, Sergey Ilyuhin, Dmitry Nikolaev, Vladimir V. Arlazarov
Auto-TLDR; A countor-based method for arbitrary document detection on a mobile device
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
Boundary-Aware Graph Convolution for Semantic Segmentation
Hanzhe Hu, Jinshi Cui, Jinshi Hongbin Zha

Auto-TLDR; Boundary-Aware Graph Convolution for Semantic Segmentation
Abstract Slides Poster Similar
Deep Realistic Novel View Generation for City-Scale Aerial Images
Koundinya Nouduri, Ke Gao, Joshua Fraser, Shizeng Yao, Hadi Aliakbarpour, Filiz Bunyak, Kannappan Palaniappan
Auto-TLDR; End-to-End 3D Voxel Renderer for Multi-View Stereo Data Generation and Evaluation
Abstract Slides Poster Similar
FourierNet: Compact Mask Representation for Instance Segmentation Using Differentiable Shape Decoders
Hamd Ul Moqeet Riaz, Nuri Benbarka, Andreas Zell

Auto-TLDR; FourierNet: A Single shot, anchor-free, fully convolutional instance segmentation method that predicts a shape vector
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
BiLuNet: A Multi-Path Network for Semantic Segmentation on X-Ray Images
Van Luan Tran, Huei-Yung Lin, Rachel Liu, Chun-Han Tseng, Chun-Han Tseng

Auto-TLDR; BiLuNet: Multi-path Convolutional Neural Network for Semantic Segmentation of Lumbar vertebrae, sacrum,
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
Aerial Road Segmentation in the Presence of Topological Label Noise
Corentin Henry, Friedrich Fraundorfer, Eleonora Vig
Auto-TLDR; Improving Road Segmentation with Noise-Aware U-Nets for Fine-Grained Topology delineation
Abstract Slides Poster Similar
Transitional Asymmetric Non-Local Neural Networks for Real-World Dirt Road Segmentation

Auto-TLDR; Transitional Asymmetric Non-Local Neural Networks for Semantic Segmentation on Dirt Roads
Abstract Slides Poster Similar
Generic Document Image Dewarping by Probabilistic Discretization of Vanishing Points
Gilles Simon, Salvatore Tabbone
Auto-TLDR; Robust Document Dewarping using vanishing points
Abstract Slides Poster Similar
EAGLE: Large-Scale Vehicle Detection Dataset in Real-World Scenarios Using Aerial Imagery
Seyed Majid Azimi, Reza Bahmanyar, Corentin Henry, Kurz Franz

Auto-TLDR; EAGLE: A Large-Scale Dataset for Multi-class Vehicle Detection with Object Orientation Information in Airborne Imagery
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Automatically Gather Address Specific Dwelling Images Using Google Street View
Auto-TLDR; Automatic Address Specific Dwelling Image Collection Using Google Street View Data
Abstract Slides Poster Similar
Semantic Segmentation Refinement Using Entropy and Boundary-guided Monte Carlo Sampling and Directed Regional Search
Zitang Sun, Sei-Ichiro Kamata, Ruojing Wang, Weili Chen
Auto-TLDR; Directed Region Search and Refinement for Semantic Segmentation
Abstract Slides Poster Similar
Video Semantic Segmentation Using Deep Multi-View Representation Learning
Akrem Sellami, Salvatore Tabbone

Auto-TLDR; Deep Multi-view Representation Learning for Video Object Segmentation
Abstract Slides Poster Similar
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
CASNet: Common Attribute Support Network for Image Instance and Panoptic Segmentation
Xiaolong Liu, Yuqing Hou, Anbang Yao, Yurong Chen, Keqiang Li

Auto-TLDR; Common Attribute Support Network for instance segmentation and panoptic segmentation
Abstract Slides Poster Similar
DE-Net: Dilated Encoder Network for Automated Tongue Segmentation
Hui Tang, Bin Wang, Jun Zhou, Yongsheng Gao

Auto-TLDR; Automated Tongue Image Segmentation using De-Net
Abstract Slides Poster Similar
Dynamic Guided Network for Monocular Depth Estimation
Xiaoxia Xing, Yinghao Cai, Yiping Yang, Dayong Wen

Auto-TLDR; DGNet: Dynamic Guidance Upsampling for Self-attention-Decoding for Monocular Depth Estimation
Abstract Slides Poster Similar
ID Documents Matching and Localization with Multi-Hypothesis Constraints
Guillaume Chiron, Nabil Ghanmi, Ahmad Montaser Awal
Auto-TLDR; Identity Document Localization in the Wild Using Multi-hypothesis Exploration
Abstract Slides Poster Similar
PSDNet: A Balanced Architecture of Accuracy and Parameters for Semantic Segmentation

Auto-TLDR; Pyramid Pooling Module with SE1Cblock and D2SUpsample Network (PSDNet)
Abstract Slides Poster Similar
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
A Novel Region of Interest Extraction Layer for Instance Segmentation
Leonardo Rossi, Akbar Karimi, Andrea Prati
Auto-TLDR; Generic RoI Extractor for Two-Stage Neural Network for Instance Segmentation
Abstract Slides Poster Similar
Learning Defects in Old Movies from Manually Assisted Restoration
Arthur Renaudeau, Travis Seng, Axel Carlier, Jean-Denis Durou, Fabien Pierre, Francois Lauze, Jean-François Aujol
Auto-TLDR; U-Net: Detecting Defects in Old Movies by Inpainting Techniques
Abstract Slides Poster Similar
Multi-scale Processing of Noisy Images using Edge Preservation Losses
Auto-TLDR; Multi-scale U-net for Noisy Image Detection and Denoising
Abstract Slides Poster Similar
Edge-Aware Monocular Dense Depth Estimation with Morphology
Zhi Li, Xiaoyang Zhu, Haitao Yu, Qi Zhang, Yongshi Jiang

Auto-TLDR; Spatio-Temporally Smooth Dense Depth Maps Using Only a CPU
Abstract Slides Poster Similar
GSTO: Gated Scale-Transfer Operation for Multi-Scale Feature Learning in Semantic Segmentation
Zhuoying Wang, Yongtao Wang, Zhi Tang, Yangyan Li, Ying Chen, Haibin Ling, Weisi Lin

Auto-TLDR; Gated Scale-Transfer Operation for Semantic Segmentation
Abstract Slides Poster Similar
User-Independent Gaze Estimation by Extracting Pupil Parameter and Its Mapping to the Gaze Angle

Auto-TLDR; Gaze Point Estimation using Pupil Shape for Generalization
Abstract Slides Poster Similar
3D Pots Configuration System by Optimizing Over Geometric Constraints
Jae Eun Kim, Muhammad Zeeshan Arshad, Seong Jong Yoo, Je Hyeong Hong, Jinwook Kim, Young Min Kim

Auto-TLDR; Optimizing 3D Configurations for Stable Pottery Restoration from irregular and noisy evidence
Abstract Slides Poster Similar
Encoder-Decoder Based Convolutional Neural Networks with Multi-Scale-Aware Modules for Crowd Counting
Pongpisit Thanasutives, Ken-Ichi Fukui, Masayuki Numao, Boonserm Kijsirikul
Auto-TLDR; M-SFANet and M-SegNet for Crowd Counting Using Multi-Scale Fusion Networks
Abstract Slides Poster Similar
Enhanced Feature Pyramid Network for Semantic Segmentation
Mucong Ye, Ouyang Jinpeng, Ge Chen, Jing Zhang, Xiaogang Yu
Auto-TLDR; EFPN: Enhanced Feature Pyramid Network for Semantic Segmentation
Abstract Slides Poster Similar
Visual Localization for Autonomous Driving: Mapping the Accurate Location in the City Maze
Dongfang Liu, Yiming Cui, Xiaolei Guo, Wei Ding, Baijian Yang, Yingjie Chen

Auto-TLDR; Feature Voting for Robust Visual Localization in Urban Settings
Abstract Slides Poster Similar
Directional Graph Networks with Hard Weight Assignments
Miguel Dominguez, Raymond Ptucha
Auto-TLDR; Hard Directional Graph Networks for Point Cloud Analysis
Abstract Slides Poster Similar
Detection and Correspondence Matching of Corneal Reflections for Eye Tracking Using Deep Learning
Soumil Chugh, Braiden Brousseau, Jonathan Rose, Moshe Eizenman
Auto-TLDR; A Fully Convolutional Neural Network for Corneal Reflection Detection and Matching in Extended Reality Eye Tracking Systems
Abstract Slides Poster Similar