FourierNet: Compact Mask Representation for Instance Segmentation Using Differentiable Shape Decoders
Hamd Ul Moqeet Riaz,
Nuri Benbarka,
Andreas Zell

Auto-TLDR; FourierNet: A Single shot, anchor-free, fully convolutional instance segmentation method that predicts a shape vector
Similar papers
SyNet: An Ensemble Network for Object Detection in UAV Images

Auto-TLDR; SyNet: Combining Multi-Stage and Single-Stage Object Detection for Aerial Images
SFPN: Semantic Feature Pyramid Network for Object Detection
Auto-TLDR; SFPN: Semantic Feature Pyramid Network to Address Information Dilution Issue in FPN
Abstract Slides Poster Similar
CASNet: Common Attribute Support Network for Image Instance and Panoptic Segmentation
Xiaolong Liu, Yuqing Hou, Anbang Yao, Yurong Chen, Keqiang Li

Auto-TLDR; Common Attribute Support Network for instance segmentation and panoptic segmentation
Abstract Slides Poster Similar
A Novel Region of Interest Extraction Layer for Instance Segmentation
Leonardo Rossi, Akbar Karimi, Andrea Prati
Auto-TLDR; Generic RoI Extractor for Two-Stage Neural Network for Instance Segmentation
Abstract Slides Poster Similar
Bidirectional Matrix Feature Pyramid Network for Object Detection
Auto-TLDR; BMFPN: Bidirectional Matrix Feature Pyramid Network for Object Detection
Abstract Slides Poster Similar
CenterRepp: Predict Central Representative Point Set's Distribution for Detection
Yulin He, Limeng Zhang, Wei Chen, Xin Luo, Chen Li, Xiaogang Jia
Auto-TLDR; CRPDet: CenterRepp Detector for Object Detection
Abstract Slides Poster Similar
Small Object Detection by Generative and Discriminative Learning
Yi Gu, Jie Li, Chentao Wu, Weijia Jia, Jianping Chen
Auto-TLDR; Generative and Discriminative Learning for Small Object Detection
Abstract Slides Poster Similar
Triplet-Path Dilated Network for Detection and Segmentation of General Pathological Images
Jiaqi Luo, Zhicheng Zhao, Fei Su, Limei Guo
Auto-TLDR; Triplet-path Network for One-Stage Object Detection and Segmentation in Pathological Images
Detecting Objects with High Object Region Percentage
Fen Fang, Qianli Xu, Liyuan Li, Ying Gu, Joo-Hwee Lim

Auto-TLDR; Faster R-CNN for High-ORP Object Detection
Abstract Slides Poster Similar
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
Scene Text Detection with Selected Anchors
Anna Zhu, Hang Du, Shengwu Xiong
Auto-TLDR; AS-RPN: Anchor Selection-based Region Proposal Network for Scene Text Detection
Abstract Slides Poster Similar
Siamese Dynamic Mask Estimation Network for Fast Video Object Segmentation
Dexiang Hong, Guorong Li, Kai Xu, Li Su, Qingming Huang

Auto-TLDR; Siamese Dynamic Mask Estimation for Video Object Segmentation
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Detective: An Attentive Recurrent Model for Sparse Object Detection
Amine Kechaou, Manuel Martinez, Monica Haurilet, Rainer Stiefelhagen

Auto-TLDR; Detective: An attentive object detector that identifies objects in images in a sequential manner
Abstract Slides Poster Similar
StrongPose: Bottom-up and Strong Keypoint Heat Map Based Pose Estimation
Auto-TLDR; StrongPose: A bottom-up box-free approach for human pose estimation and action recognition
Abstract Slides Poster Similar
Revisiting Sequence-To-Sequence Video Object Segmentation with Multi-Task Loss and Skip-Memory
Fatemeh Azimi, Benjamin Bischke, Sebastian Palacio, Federico Raue, Jörn Hees, Andreas Dengel

Auto-TLDR; Sequence-to-Sequence Learning for Video Object Segmentation
Abstract Slides Poster Similar
FeatureNMS: Non-Maximum Suppression by Learning Feature Embeddings

Auto-TLDR; FeatureNMS: Non-Maximum Suppression for Multiple Object Detection
Abstract Slides Poster Similar
One-Stage Multi-Task Detector for 3D Cardiac MR Imaging
Weizeng Lu, Xi Jia, Wei Chen, Nicolò Savioli, Antonio De Marvao, Linlin Shen, Declan O'Regan, Jinming Duan
Auto-TLDR; Multi-task Learning for Real-Time, simultaneous landmark location and bounding box detection in 3D space
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
Object Detection Model Based on Scene-Level Region Proposal Self-Attention
Yu Quan, Zhixin Li, Canlong Zhang, Huifang Ma
Auto-TLDR; Exploiting Semantic Informations for Object Detection
Abstract Slides Poster Similar
Object Detection in the DCT Domain: Is Luminance the Solution?
Benjamin Deguerre, Clement Chatelain, Gilles Gasso

Auto-TLDR; Jpeg Deep: Object Detection Using Compressed JPEG Images
Abstract Slides Poster Similar
Efficient Grouping for Keypoint Detection
Alexey Sidnev, Ekaterina Krasikova, Maxim Kazakov
Auto-TLDR; Automatic Keypoint Grouping for DeepFashion2 Dataset
Abstract Slides Poster Similar
Construction Worker Hardhat-Wearing Detection Based on an Improved BiFPN
Chenyang Zhang, Zhiqiang Tian, Jingyi Song, Yaoyue Zheng, Bo Xu

Auto-TLDR; A One-Stage Object Detection Method for Hardhat-Wearing in Construction Site
Abstract Slides Poster Similar
Foreground-Focused Domain Adaption for Object Detection
Auto-TLDR; Unsupervised Domain Adaptation for Unsupervised Object Detection
Cascade Saliency Attention Network for Object Detection in Remote Sensing Images
Dayang Yu, Rong Zhang, Shan Qin
Auto-TLDR; Cascade Saliency Attention Network for Object Detection in Remote Sensing Images
Abstract Slides Poster Similar
Learning a Dynamic High-Resolution Network for Multi-Scale Pedestrian Detection
Mengyuan Ding, Shanshan Zhang, Jian Yang

Auto-TLDR; Learningable Dynamic HRNet for Pedestrian Detection
Abstract Slides Poster Similar
Hybrid Cascade Point Search Network for High Precision Bar Chart Component Detection
Junyu Luo, Jinpeng Wang, Chin-Yew Lin
Auto-TLDR; Object Detection of Chart Components in Chart Images Using Point-based and Region-Based Object Detection Framework
Abstract Slides Poster Similar
End-To-End Deep Learning Methods for Automated Damage Detection in Extreme Events at Various Scales
Yongsheng Bai, Alper Yilmaz, Halil Sezen

Auto-TLDR; Robust Mask R-CNN for Crack Detection in Extreme Events
Abstract Slides Poster Similar
Utilising Visual Attention Cues for Vehicle Detection and Tracking
Feiyan Hu, Venkatesh Gurram Munirathnam, Noel E O'Connor, Alan Smeaton, Suzanne Little

Auto-TLDR; Visual Attention for Object Detection and Tracking in Driver-Assistance Systems
Abstract Slides Poster Similar
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
Object Detection on Monocular Images with Two-Dimensional Canonical Correlation Analysis

Auto-TLDR; Multi-Task Object Detection from Monocular Images Using Multimodal RGB and Depth Data
Abstract Slides Poster Similar
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
Superpixel-Based Refinement for Object Proposal Generation
Christian Wilms, Simone Frintrop
Auto-TLDR; Superpixel-based Refinement of AttentionMask for Object Segmentation
Abstract Slides Poster Similar
Hierarchical Head Design for Object Detectors
Shivang Agarwal, Frederic Jurie
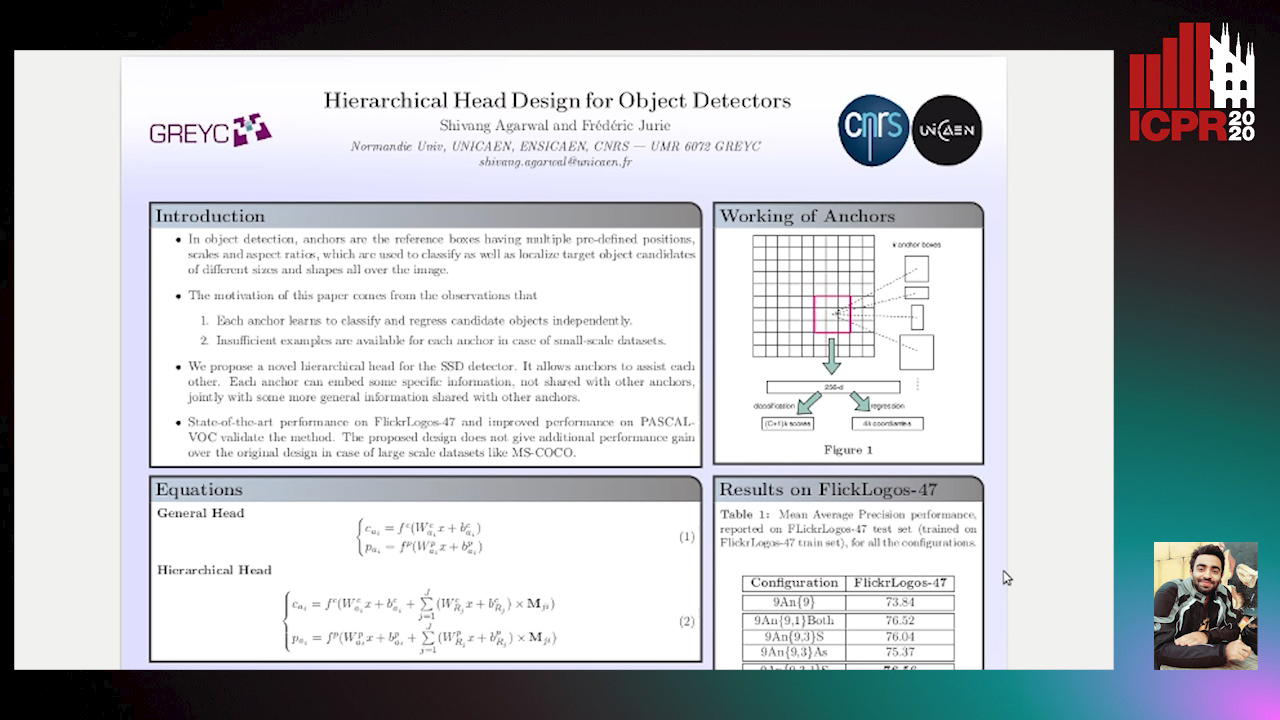
Auto-TLDR; Hierarchical Anchor for SSD Detector
Abstract Slides Poster Similar
An Accurate Threshold Insensitive Kernel Detector for Arbitrary Shaped Text
Xijun Qian, Yifan Liu, Yu-Bin Yang
Auto-TLDR; TIKD: threshold insensitive kernel detector for arbitrary shaped text
Nighttime Pedestrian Detection Based on Feature Attention and Transformation
Gang Li, Shanshan Zhang, Jian Yang
Auto-TLDR; FAM and FTM: Enhanced Feature Attention Module and Feature Transformation Module for nighttime pedestrian detection
Abstract Slides Poster Similar
VTT: Long-Term Visual Tracking with Transformers
Tianling Bian, Yang Hua, Tao Song, Zhengui Xue, Ruhui Ma, Neil Robertson, Haibing Guan
Auto-TLDR; Visual Tracking Transformer with transformers for long-term visual tracking
Tiny Object Detection in Aerial Images
Jinwang Wang, Wen Yang, Haowen Guo, Ruixiang Zhang, Gui-Song Xia
Auto-TLDR; Tiny Object Detection in Aerial Images Using Multiple Center Points Based Learning Network
Convolutional STN for Weakly Supervised Object Localization
Akhil Meethal, Marco Pedersoli, Soufiane Belharbi, Eric Granger
Auto-TLDR; Spatial Localization for Weakly Supervised Object Localization
Neural Compression and Filtering for Edge-assisted Real-time Object Detection in Challenged Networks
Yoshitomo Matsubara, Marco Levorato
Auto-TLDR; Deep Neural Networks for Remote Object Detection Using Edge Computing
Abstract Slides Poster Similar
Simple Multi-Resolution Representation Learning for Human Pose Estimation
Trung Tran Quang, Van Giang Nguyen, Daeyoung Kim
Auto-TLDR; Multi-resolution Heatmap Learning for Human Pose Estimation
Abstract Slides Poster Similar
P2 Net: Augmented Parallel-Pyramid Net for Attention Guided Pose Estimation
Luanxuan Hou, Jie Cao, Yuan Zhao, Haifeng Shen, Jian Tang, Ran He
Auto-TLDR; Parallel-Pyramid Net with Partial Attention for Human Pose Estimation
Abstract Slides Poster Similar
MagnifierNet: Learning Efficient Small-Scale Pedestrian Detector towards Multiple Dense Regions
Qi Cheng, Mingqin Chen, Yingjie Wu, Fei Chen, Shiping Lin

Auto-TLDR; MagnifierNet: A Simple but Effective Small-Scale Pedestrian Detection Towards Multiple Dense Regions
Abstract Slides Poster Similar
RSINet: Rotation-Scale Invariant Network for Online Visual Tracking
Yang Fang, Geunsik Jo, Chang-Hee Lee

Auto-TLDR; RSINet: Rotation-Scale Invariant Network for Adaptive Tracking
Abstract Slides Poster Similar
Machine-Learned Regularization and Polygonization of Building Segmentation Masks
Stefano Zorzi, Ksenia Bittner, Friedrich Fraundorfer

Auto-TLDR; Automatic Regularization and Polygonization of Building Segmentation masks using Generative Adversarial Network
Abstract Slides Poster Similar
DualBox: Generating BBox Pair with Strong Correspondence Via Occlusion Pattern Clustering and Proposal Refinement
Zheng Ge, Chuyu Hu, Xin Huang, Baiqiao Qiu, Osamu Yoshie
Auto-TLDR; R2NMS: Combining Full and Visible Body Bounding Box for Dense Pedestrian Detection
Abstract Slides Poster Similar
Uncertainty Guided Recognition of Tiny Craters on the Moon
Thorsten Wilhelm, Christian Wöhler

Auto-TLDR; Accurately Detecting Tiny Craters in Remote Sensed Images Using Deep Neural Networks
Abstract Slides Poster Similar
S-VoteNet: Deep Hough Voting with Spherical Proposal for 3D Object Detection
Yanxian Chen, Huimin Ma, Xi Li, Xiong Luo

Auto-TLDR; S-VoteNet: 3D Object Detection with Spherical Bounded Box Prediction
Abstract Slides Poster Similar