Superpixel-Based Refinement for Object Proposal Generation
Christian Wilms,
Simone Frintrop
Auto-TLDR; Superpixel-based Refinement of AttentionMask for Object Segmentation
Similar papers
Which Airline Is This? Airline Logo Detection in Real-World Weather Conditions
Christian Wilms, Rafael Heid, Mohammad Araf Sadeghi, Andreas Ribbrock, Simone Frintrop

Auto-TLDR; Airlines logo detection on airplane tails using data augmentation
Abstract Slides Poster Similar
A Novel Region of Interest Extraction Layer for Instance Segmentation
Leonardo Rossi, Akbar Karimi, Andrea Prati
Auto-TLDR; Generic RoI Extractor for Two-Stage Neural Network for Instance Segmentation
Abstract Slides Poster Similar
SFPN: Semantic Feature Pyramid Network for Object Detection
Auto-TLDR; SFPN: Semantic Feature Pyramid Network to Address Information Dilution Issue in FPN
Abstract Slides Poster Similar
Bidirectional Matrix Feature Pyramid Network for Object Detection
Auto-TLDR; BMFPN: Bidirectional Matrix Feature Pyramid Network for Object Detection
Abstract Slides Poster Similar
MFPP: Morphological Fragmental Perturbation Pyramid for Black-Box Model Explanations
Qing Yang, Xia Zhu, Jong-Kae Fwu, Yun Ye, Ganmei You, Yuan Zhu
Auto-TLDR; Morphological Fragmental Perturbation Pyramid for Explainable Deep Neural Network
Abstract Slides Poster Similar
Nighttime Pedestrian Detection Based on Feature Attention and Transformation
Gang Li, Shanshan Zhang, Jian Yang
Auto-TLDR; FAM and FTM: Enhanced Feature Attention Module and Feature Transformation Module for nighttime pedestrian detection
Abstract Slides Poster Similar
Weakly Supervised Body Part Segmentation with Pose Based Part Priors
Zhengyuan Yang, Yuncheng Li, Linjie Yang, Ning Zhang, Jiebo Luo
Auto-TLDR; Weakly Supervised Body Part Segmentation Using Weak Labels
SyNet: An Ensemble Network for Object Detection in UAV Images

Auto-TLDR; SyNet: Combining Multi-Stage and Single-Stage Object Detection for Aerial Images
ScarfNet: Multi-Scale Features with Deeply Fused and Redistributed Semantics for Enhanced Object Detection
Jin Hyeok Yoo, Dongsuk Kum, Jun Won Choi
Auto-TLDR; Semantic Fusion of Multi-scale Feature Maps for Object Detection
Abstract Slides Poster Similar
BP-Net: Deep Learning-Based Superpixel Segmentation for RGB-D Image
Bin Zhang, Xuejing Kang, Anlong Ming
Auto-TLDR; A Deep Learning-based Superpixel Segmentation Algorithm for RGB-D Image
Abstract Slides Poster Similar
Triplet-Path Dilated Network for Detection and Segmentation of General Pathological Images
Jiaqi Luo, Zhicheng Zhao, Fei Su, Limei Guo
Auto-TLDR; Triplet-path Network for One-Stage Object Detection and Segmentation in Pathological Images
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
Revisiting Sequence-To-Sequence Video Object Segmentation with Multi-Task Loss and Skip-Memory
Fatemeh Azimi, Benjamin Bischke, Sebastian Palacio, Federico Raue, Jörn Hees, Andreas Dengel

Auto-TLDR; Sequence-to-Sequence Learning for Video Object Segmentation
Abstract Slides Poster Similar
Content-Sensitive Superpixels Based on Adaptive Regrowth
Auto-TLDR; Adaptive Regrowth for Content-Sensitive Superpixels
Abstract Slides Poster Similar
Small Object Detection by Generative and Discriminative Learning
Yi Gu, Jie Li, Chentao Wu, Weijia Jia, Jianping Chen
Auto-TLDR; Generative and Discriminative Learning for Small Object Detection
Abstract Slides Poster Similar
Detecting Objects with High Object Region Percentage
Fen Fang, Qianli Xu, Liyuan Li, Ying Gu, Joo-Hwee Lim

Auto-TLDR; Faster R-CNN for High-ORP Object Detection
Abstract Slides Poster Similar
Boundary-Aware Graph Convolution for Semantic Segmentation
Hanzhe Hu, Jinshi Cui, Jinshi Hongbin Zha

Auto-TLDR; Boundary-Aware Graph Convolution for Semantic Segmentation
Abstract Slides Poster Similar
Construction Worker Hardhat-Wearing Detection Based on an Improved BiFPN
Chenyang Zhang, Zhiqiang Tian, Jingyi Song, Yaoyue Zheng, Bo Xu

Auto-TLDR; A One-Stage Object Detection Method for Hardhat-Wearing in Construction Site
Abstract Slides Poster Similar
Semantic Segmentation Refinement Using Entropy and Boundary-guided Monte Carlo Sampling and Directed Regional Search
Zitang Sun, Sei-Ichiro Kamata, Ruojing Wang, Weili Chen
Auto-TLDR; Directed Region Search and Refinement for Semantic Segmentation
Abstract Slides Poster Similar
StrongPose: Bottom-up and Strong Keypoint Heat Map Based Pose Estimation
Auto-TLDR; StrongPose: A bottom-up box-free approach for human pose estimation and action recognition
Abstract Slides Poster Similar
Simple Multi-Resolution Representation Learning for Human Pose Estimation
Trung Tran Quang, Van Giang Nguyen, Daeyoung Kim
Auto-TLDR; Multi-resolution Heatmap Learning for Human Pose Estimation
Abstract Slides Poster Similar
Siamese Dynamic Mask Estimation Network for Fast Video Object Segmentation
Dexiang Hong, Guorong Li, Kai Xu, Li Su, Qingming Huang

Auto-TLDR; Siamese Dynamic Mask Estimation for Video Object Segmentation
Abstract Slides Poster Similar
Learning a Dynamic High-Resolution Network for Multi-Scale Pedestrian Detection
Mengyuan Ding, Shanshan Zhang, Jian Yang

Auto-TLDR; Learningable Dynamic HRNet for Pedestrian Detection
Abstract Slides Poster Similar
ACRM: Attention Cascade R-CNN with Mix-NMS for Metallic Surface Defect Detection
Junting Fang, Xiaoyang Tan, Yuhui Wang

Auto-TLDR; Attention Cascade R-CNN with Mix Non-Maximum Suppression for Robust Metal Defect Detection
Abstract Slides Poster Similar
Detective: An Attentive Recurrent Model for Sparse Object Detection
Amine Kechaou, Manuel Martinez, Monica Haurilet, Rainer Stiefelhagen

Auto-TLDR; Detective: An attentive object detector that identifies objects in images in a sequential manner
Abstract Slides Poster Similar
Attention Pyramid Module for Scene Recognition
Zhinan Qiao, Xiaohui Yuan, Chengyuan Zhuang, Abolfazl Meyarian
Auto-TLDR; Attention Pyramid Module for Multi-Scale Scene Recognition
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Efficient-Receptive Field Block with Group Spatial Attention Mechanism for Object Detection
Jiacheng Zhang, Zhicheng Zhao, Fei Su
Auto-TLDR; E-RFB: Efficient-Receptive Field Block for Deep Neural Network for Object Detection
Abstract Slides Poster Similar
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
Object Detection Model Based on Scene-Level Region Proposal Self-Attention
Yu Quan, Zhixin Li, Canlong Zhang, Huifang Ma
Auto-TLDR; Exploiting Semantic Informations for Object Detection
Abstract Slides Poster Similar
Convolutional STN for Weakly Supervised Object Localization
Akhil Meethal, Marco Pedersoli, Soufiane Belharbi, Eric Granger
Auto-TLDR; Spatial Localization for Weakly Supervised Object Localization
GSTO: Gated Scale-Transfer Operation for Multi-Scale Feature Learning in Semantic Segmentation
Zhuoying Wang, Yongtao Wang, Zhi Tang, Yangyan Li, Ying Chen, Haibin Ling, Weisi Lin

Auto-TLDR; Gated Scale-Transfer Operation for Semantic Segmentation
Abstract Slides Poster Similar
Deep Superpixel Cut for Unsupervised Image Segmentation
Auto-TLDR; Deep Superpixel Cut for Deep Unsupervised Image Segmentation
Abstract Slides Poster Similar
CASNet: Common Attribute Support Network for Image Instance and Panoptic Segmentation
Xiaolong Liu, Yuqing Hou, Anbang Yao, Yurong Chen, Keqiang Li

Auto-TLDR; Common Attribute Support Network for instance segmentation and panoptic segmentation
Abstract Slides Poster Similar
Question-Agnostic Attention for Visual Question Answering
Moshiur R Farazi, Salman Hameed Khan, Nick Barnes
Auto-TLDR; Question-Agnostic Attention for Visual Question Answering
Abstract Slides Poster Similar
RescueNet: Joint Building Segmentation and Damage Assessment from Satellite Imagery
Auto-TLDR; RescueNet: End-to-End Building Segmentation and Damage Classification for Humanitarian Aid and Disaster Response
Abstract Slides Poster Similar
Hybrid Cascade Point Search Network for High Precision Bar Chart Component Detection
Junyu Luo, Jinpeng Wang, Chin-Yew Lin
Auto-TLDR; Object Detection of Chart Components in Chart Images Using Point-based and Region-Based Object Detection Framework
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Joint Semantic-Instance Segmentation of 3D Point Clouds: Instance Separation and Semantic Fusion
Auto-TLDR; Joint Semantic Segmentation and Instance Separation of 3D Point Clouds
Abstract Slides Poster Similar
DualBox: Generating BBox Pair with Strong Correspondence Via Occlusion Pattern Clustering and Proposal Refinement
Zheng Ge, Chuyu Hu, Xin Huang, Baiqiao Qiu, Osamu Yoshie
Auto-TLDR; R2NMS: Combining Full and Visible Body Bounding Box for Dense Pedestrian Detection
Abstract Slides Poster Similar
PRF-Ped: Multi-Scale Pedestrian Detector with Prior-Based Receptive Field
Yuzhi Tan, Hongxun Yao, Haoran Li, Xiusheng Lu, Haozhe Xie
Auto-TLDR; Bidirectional Feature Enhancement Module for Multi-Scale Pedestrian Detection
Abstract Slides Poster Similar
Correlation-Based ConvNet for Small Object Detection in Videos
Brais Bosquet, Manuel Mucientes, Victor Brea
Auto-TLDR; STDnet-ST: An End-to-End Spatio-Temporal Convolutional Neural Network for Small Object Detection in Video
Abstract Slides Poster Similar
FourierNet: Compact Mask Representation for Instance Segmentation Using Differentiable Shape Decoders
Hamd Ul Moqeet Riaz, Nuri Benbarka, Andreas Zell

Auto-TLDR; FourierNet: A Single shot, anchor-free, fully convolutional instance segmentation method that predicts a shape vector
Abstract Slides Poster Similar
Gabriella: An Online System for Real-Time Activity Detection in Untrimmed Security Videos
Mamshad Nayeem Rizve, Ugur Demir, Praveen Praveen Tirupattur, Aayush Jung Rana, Kevin Duarte, Ishan Rajendrakumar Dave, Yogesh Rawat, Mubarak Shah
Auto-TLDR; Gabriella: A Real-Time Online System for Activity Detection in Surveillance Videos
Coarse to Fine: Progressive and Multi-Task Learning for Salient Object Detection
Dong-Goo Kang, Sangwoo Park, Joonki Paik
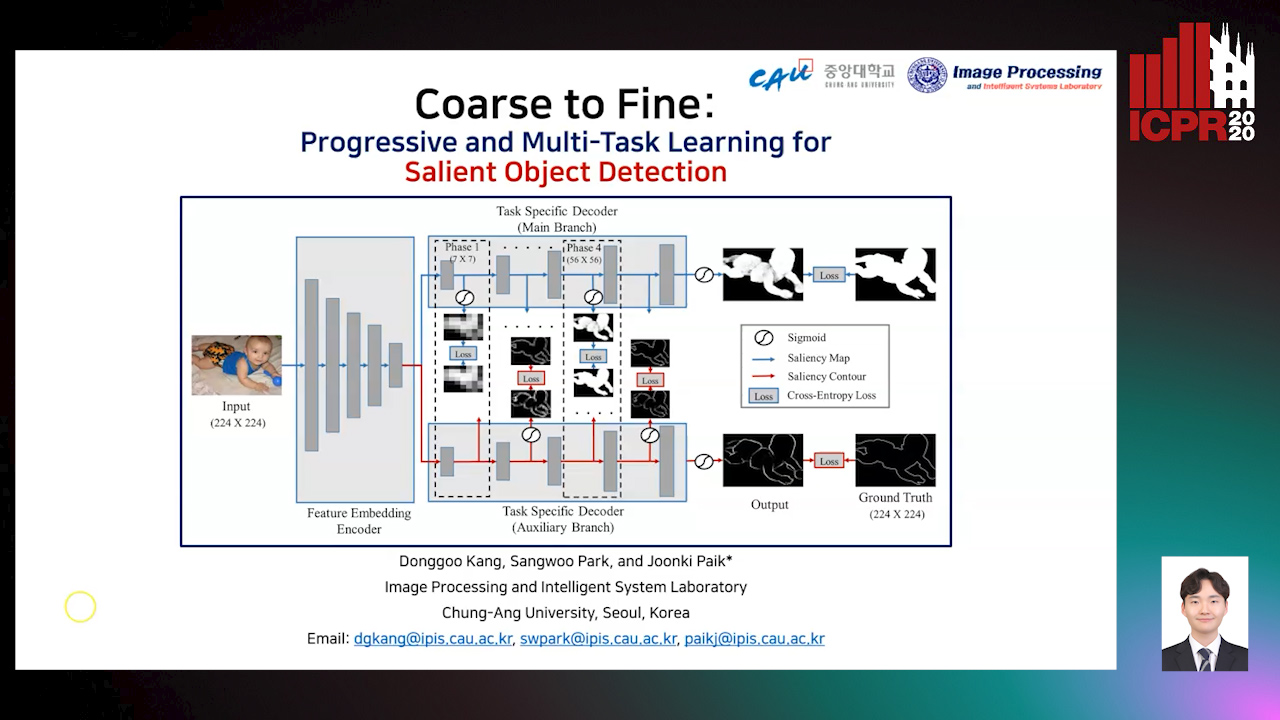
Auto-TLDR; Progressive and mutl-task learning scheme for salient object detection
Abstract Slides Poster Similar
Dual-Attention Guided Dropblock Module for Weakly Supervised Object Localization
Junhui Yin, Siqing Zhang, Dongliang Chang, Zhanyu Ma, Jun Guo
Auto-TLDR; Dual-Attention Guided Dropblock for Weakly Supervised Object Localization
Abstract Slides Poster Similar
CDeC-Net: Composite Deformable Cascade Network for Table Detection in Document Images
Madhav Agarwal, Ajoy Mondal, C. V. Jawahar
Auto-TLDR; CDeC-Net: An End-to-End Trainable Deep Network for Detecting Tables in Document Images
Detecting Marine Species in Echograms Via Traditional, Hybrid, and Deep Learning Frameworks
Porto Marques Tunai, Alireza Rezvanifar, Melissa Cote, Alexandra Branzan Albu, Kaan Ersahin, Todd Mudge, Stephane Gauthier
Auto-TLDR; End-to-End Deep Learning for Echogram Interpretation of Marine Species in Echograms
Abstract Slides Poster Similar