Content-Sensitive Superpixels Based on Adaptive Regrowth
Auto-TLDR; Adaptive Regrowth for Content-Sensitive Superpixels
Similar papers
BP-Net: Deep Learning-Based Superpixel Segmentation for RGB-D Image
Bin Zhang, Xuejing Kang, Anlong Ming
Auto-TLDR; A Deep Learning-based Superpixel Segmentation Algorithm for RGB-D Image
Abstract Slides Poster Similar
Generalized Shortest Path-Based Superpixels for Accurate Segmentation of Spherical Images
Rémi Giraud, Rodrigo Borba Pinheiro, Yannick Berthoumieu
Auto-TLDR; SPS: Spherical Shortest Path-based Superpixels
Abstract Slides Poster Similar
Deep Superpixel Cut for Unsupervised Image Segmentation
Auto-TLDR; Deep Superpixel Cut for Deep Unsupervised Image Segmentation
Abstract Slides Poster Similar
Superpixel-Based Refinement for Object Proposal Generation
Christian Wilms, Simone Frintrop
Auto-TLDR; Superpixel-based Refinement of AttentionMask for Object Segmentation
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Fused 3-Stage Image Segmentation for Pleural Effusion Cell Clusters
Sike Ma, Meng Zhao, Hao Wang, Fan Shi, Xuguo Sun, Shengyong Chen, Hong-Ning Dai
Auto-TLDR; Coarse Segmentation of Stained and Stained Unstained Cell Clusters in pleural effusion using 3-stage segmentation method
Abstract Slides Poster Similar
Object Segmentation Tracking from Generic Video Cues
Amirhossein Kardoost, Sabine Müller, Joachim Weickert, Margret Keuper

Auto-TLDR; A Light-Weight Variational Framework for Video Object Segmentation in Videos
Abstract Slides Poster Similar
3D Semantic Labeling of Photogrammetry Meshes Based on Active Learning
Mengqi Rong, Shuhan Shen, Zhanyi Hu

Auto-TLDR; 3D Semantic Expression of Urban Scenes Based on Active Learning
Abstract Slides Poster Similar
Edge-Aware Monocular Dense Depth Estimation with Morphology
Zhi Li, Xiaoyang Zhu, Haitao Yu, Qi Zhang, Yongshi Jiang

Auto-TLDR; Spatio-Temporally Smooth Dense Depth Maps Using Only a CPU
Abstract Slides Poster Similar
Semantic Segmentation Refinement Using Entropy and Boundary-guided Monte Carlo Sampling and Directed Regional Search
Zitang Sun, Sei-Ichiro Kamata, Ruojing Wang, Weili Chen
Auto-TLDR; Directed Region Search and Refinement for Semantic Segmentation
Abstract Slides Poster Similar
A Hierarchical Framework for Leaf Instance Segmentation: Application to Plant Phenotyping
Swati Bhugra, Kanish Garg, Santanu Chaudhury, Brejesh Lall
Auto-TLDR; Under-segmentation of plant image using a graph based formulation to extract leaf shape knowledge for the task of leaf instance segmentation
Abstract Slides Poster Similar
Siamese Graph Convolution Network for Face Sketch Recognition
Liang Fan, Xianfang Sun, Paul Rosin
Auto-TLDR; A novel Siamese graph convolution network for face sketch recognition
Abstract Slides Poster Similar
Visual Saliency Oriented Vehicle Scale Estimation
Qixin Chen, Tie Liu, Jiali Ding, Zejian Yuan, Yuanyuan Shang

Auto-TLDR; Regularized Intensity Matching for Vehicle Scale Estimation with salient object detection
Abstract Slides Poster Similar
Motion Segmentation with Pairwise Matches and Unknown Number of Motions
Federica Arrigoni, Tomas Pajdla, Luca Magri

Auto-TLDR; Motion Segmentation using Multi-Modelfitting andpermutation synchronization
Abstract Slides Poster Similar
Expectation-Maximization for Scheduling Problems in Satellite Communication
Werner Bailer, Martin Winter, Johannes Ebert, Joel Flavio, Karin Plimon
Auto-TLDR; Unsupervised Machine Learning for Satellite Communication Using Expectation-Maximization
Abstract Slides Poster Similar
MFPP: Morphological Fragmental Perturbation Pyramid for Black-Box Model Explanations
Qing Yang, Xia Zhu, Jong-Kae Fwu, Yun Ye, Ganmei You, Yuan Zhu
Auto-TLDR; Morphological Fragmental Perturbation Pyramid for Explainable Deep Neural Network
Abstract Slides Poster Similar
Feature Embedding Based Text Instance Grouping for Largely Spaced and Occluded Text Detection
Pan Gao, Qi Wan, Renwu Gao, Linlin Shen
Auto-TLDR; Text Instance Embedding Based Feature Embeddings for Multiple Text Instance Grouping
Abstract Slides Poster Similar
Boundary-Aware Graph Convolution for Semantic Segmentation
Hanzhe Hu, Jinshi Cui, Jinshi Hongbin Zha

Auto-TLDR; Boundary-Aware Graph Convolution for Semantic Segmentation
Abstract Slides Poster Similar
Multi-Camera Sports Players 3D Localization with Identification Reasoning
Yukun Yang, Ruiheng Zhang, Wanneng Wu, Yu Peng, Xu Min

Auto-TLDR; Probabilistic and Identified Occupancy Map for Sports Players 3D Localization
Abstract Slides Poster Similar
Hybrid Cascade Point Search Network for High Precision Bar Chart Component Detection
Junyu Luo, Jinpeng Wang, Chin-Yew Lin
Auto-TLDR; Object Detection of Chart Components in Chart Images Using Point-based and Region-Based Object Detection Framework
Abstract Slides Poster Similar
Learning to Segment Clustered Amoeboid Cells from Brightfield Microscopy Via Multi-Task Learning with Adaptive Weight Selection
Rituparna Sarkar, Suvadip Mukherjee, Elisabeth Labruyere, Jean-Christophe Olivo-Marin
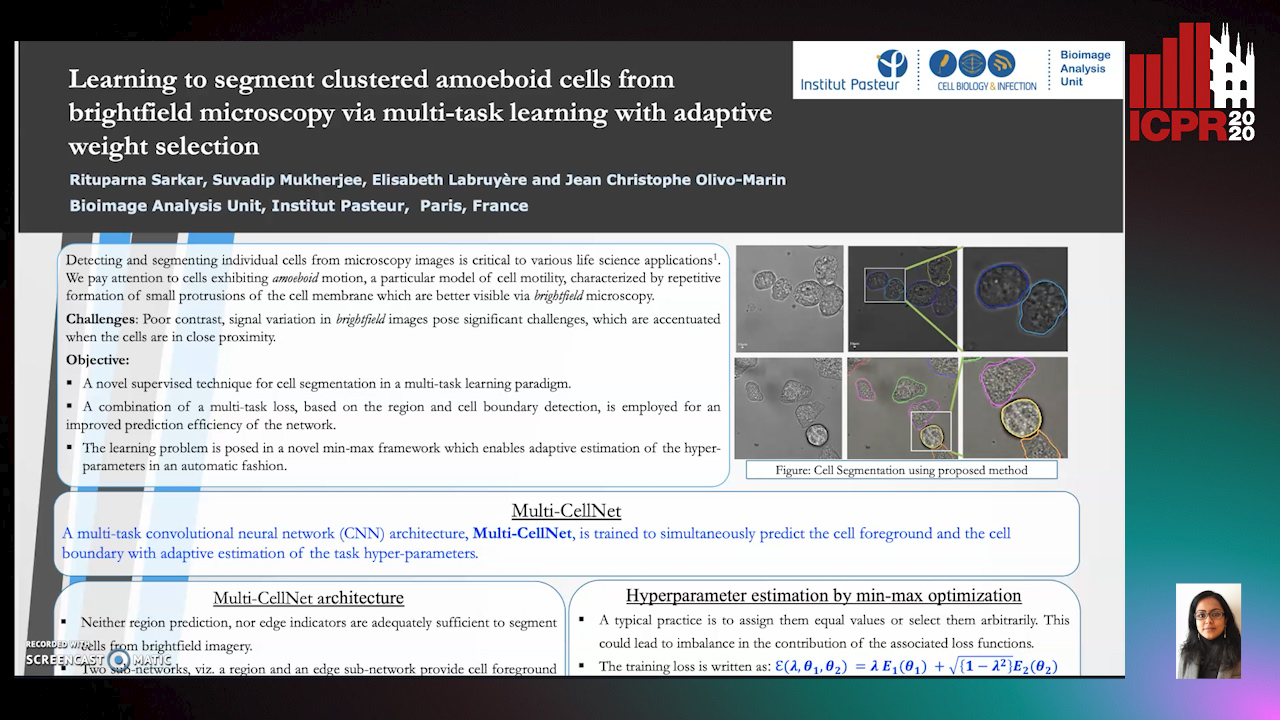
Auto-TLDR; Supervised Cell Segmentation from Microscopy Images using Multi-task Learning in a Multi-Task Learning Paradigm
Kernel-Based LIME with Feature Dependency Sampling
Sheng Shi, Yangzhou Du, Fan Wei
Auto-TLDR; Local Interpretable Model-agnostic Explanation with Feature Dependency Sampling
Abstract Slides Poster Similar
PIF: Anomaly detection via preference embedding
Filippo Leveni, Luca Magri, Giacomo Boracchi, Cesare Alippi
Auto-TLDR; PIF: Anomaly Detection with Preference Embedding for Structured Patterns
Abstract Slides Poster Similar
Coarse to Fine: Progressive and Multi-Task Learning for Salient Object Detection
Dong-Goo Kang, Sangwoo Park, Joonki Paik
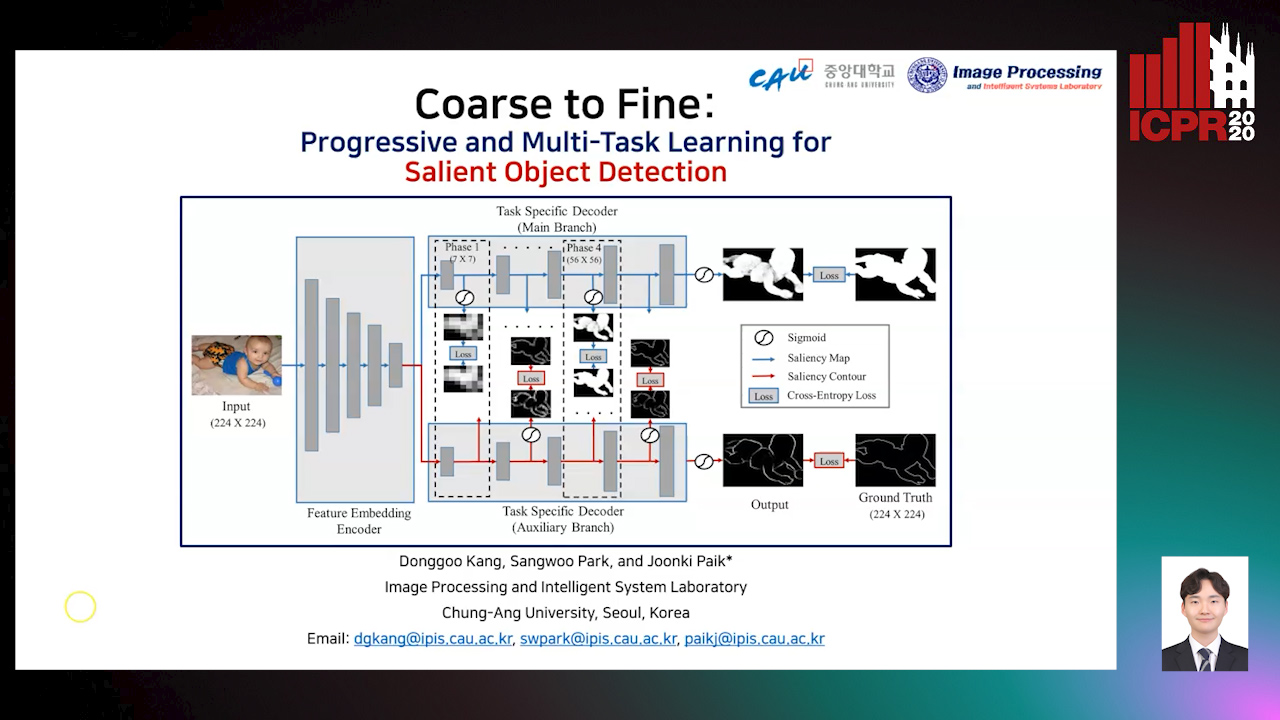
Auto-TLDR; Progressive and mutl-task learning scheme for salient object detection
Abstract Slides Poster Similar
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
An Accurate Threshold Insensitive Kernel Detector for Arbitrary Shaped Text
Xijun Qian, Yifan Liu, Yu-Bin Yang
Auto-TLDR; TIKD: threshold insensitive kernel detector for arbitrary shaped text
Cost Volume Refinement for Depth Prediction
João L. Cardoso, Nuno Goncalves, Michael Wimmer

Auto-TLDR; Refining the Cost Volume for Depth Prediction from Light Field Cameras
Abstract Slides Poster Similar
Graph Signal Active Contours

Auto-TLDR; Adaptation of Active Contour Without Edges for Graph Signal Processing
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Weakly Supervised Geodesic Segmentation of Egyptian Mummy CT Scans
Avik Hati, Matteo Bustreo, Diego Sona, Vittorio Murino, Alessio Del Bue

Auto-TLDR; A Weakly Supervised and Efficient Interactive Segmentation of Ancient Egyptian Mummies CT Scans Using Geodesic Distance Measure and GrabCut
Abstract Slides Poster Similar
Automated Whiteboard Lecture Video Summarization by Content Region Detection and Representation
Bhargava Urala Kota, Alexander Stone, Kenny Davila, Srirangaraj Setlur, Venu Govindaraju
Auto-TLDR; A Framework for Summarizing Whiteboard Lecture Videos Using Feature Representations of Handwritten Content Regions
Fast Region-Adaptive Defogging and Enhancement for Outdoor Images Containing Sky
Zhan Li, Xiaopeng Zheng, Bir Bhanu, Shun Long, Qingfeng Zhang, Zhenghao Huang

Auto-TLDR; Image defogging and enhancement of hazy outdoor scenes using region-adaptive segmentation and region-ratio-based adaptive Gamma correction
Abstract Slides Poster Similar
Facetwise Mesh Refinement for Multi-View Stereo
Andrea Romanoni, Matteo Matteucci
Auto-TLDR; Facetwise Refinement of Multi-View Stereo using Delaunay Triangulations
Sketch-Based Community Detection Via Representative Node Sampling
Mahlagha Sedghi, Andre Beckus, George Atia
Auto-TLDR; Sketch-based Clustering of Community Detection Using a Small Sketch
Abstract Slides Poster Similar
GraphBGS: Background Subtraction Via Recovery of Graph Signals
Jhony Heriberto Giraldo Zuluaga, Thierry Bouwmans
Auto-TLDR; Graph BackGround Subtraction using Graph Signals
Abstract Slides Poster Similar
Revisiting Sequence-To-Sequence Video Object Segmentation with Multi-Task Loss and Skip-Memory
Fatemeh Azimi, Benjamin Bischke, Sebastian Palacio, Federico Raue, Jörn Hees, Andreas Dengel

Auto-TLDR; Sequence-to-Sequence Learning for Video Object Segmentation
Abstract Slides Poster Similar
S-VoteNet: Deep Hough Voting with Spherical Proposal for 3D Object Detection
Yanxian Chen, Huimin Ma, Xi Li, Xiong Luo

Auto-TLDR; S-VoteNet: 3D Object Detection with Spherical Bounded Box Prediction
Abstract Slides Poster Similar
Video Episode Boundary Detection with Joint Episode-Topic Model
Shunyao Wang, Ye Tian, Ruidong Wang, Yang Du, Han Yan, Ruilin Yang, Jian Ma
Auto-TLDR; Unsupervised Video Episode Boundary Detection for Bullet Screen Comment Video
Abstract Slides Poster Similar
CASNet: Common Attribute Support Network for Image Instance and Panoptic Segmentation
Xiaolong Liu, Yuqing Hou, Anbang Yao, Yurong Chen, Keqiang Li

Auto-TLDR; Common Attribute Support Network for instance segmentation and panoptic segmentation
Abstract Slides Poster Similar
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Walk the Lines: Object Contour Tracing CNN for Contour Completion of Ships
Auto-TLDR; Walk the Lines: A Convolutional Neural Network trained to follow object contours
Abstract Slides Poster Similar
Learning Embeddings for Image Clustering: An Empirical Study of Triplet Loss Approaches
Kalun Ho, Janis Keuper, Franz-Josef Pfreundt, Margret Keuper
Auto-TLDR; Clustering Objectives for K-means and Correlation Clustering Using Triplet Loss
Abstract Slides Poster Similar
On Morphological Hierarchies for Image Sequences
Caglayan Tuna, Alain Giros, François Merciol, Sébastien Lefèvre
Auto-TLDR; Comparison of Hierarchies for Image Sequences
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
HMFlow: Hybrid Matching Optical Flow Network for Small and Fast-Moving Objects
Suihanjin Yu, Youmin Zhang, Chen Wang, Xiao Bai, Liang Zhang, Edwin Hancock
Auto-TLDR; Hybrid Matching Optical Flow Network with Global Matching Component
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar