Motion Segmentation with Pairwise Matches and Unknown Number of Motions
Federica Arrigoni,
Tomas Pajdla,
Luca Magri

Auto-TLDR; Motion Segmentation using Multi-Modelfitting andpermutation synchronization
Similar papers
PIF: Anomaly detection via preference embedding
Filippo Leveni, Luca Magri, Giacomo Boracchi, Cesare Alippi
Auto-TLDR; PIF: Anomaly Detection with Preference Embedding for Structured Patterns
Abstract Slides Poster Similar
Total Estimation from RGB Video: On-Line Camera Self-Calibration, Non-Rigid Shape and Motion

Auto-TLDR; Joint Auto-Calibration, Pose and 3D Reconstruction of a Non-rigid Object from an uncalibrated RGB Image Sequence
Abstract Slides Poster Similar
Learning to Find Good Correspondences of Multiple Objects
Youye Xie, Yingheng Tang, Gongguo Tang, William Hoff
Auto-TLDR; Multi-Object Inliers and Outliers for Perspective-n-Point and Object Recognition
Abstract Slides Poster Similar
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
3D Pots Configuration System by Optimizing Over Geometric Constraints
Jae Eun Kim, Muhammad Zeeshan Arshad, Seong Jong Yoo, Je Hyeong Hong, Jinwook Kim, Young Min Kim

Auto-TLDR; Optimizing 3D Configurations for Stable Pottery Restoration from irregular and noisy evidence
Abstract Slides Poster Similar
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Gabrielle Flood, David Gillsjö, Patrik Persson, Anders Heyden, Kalle Åström

Auto-TLDR; A Low-Memory Footprint Representation for Robust Map Merge
Abstract Slides Poster Similar
Minimal Solvers for Indoor UAV Positioning
Marcus Valtonen Örnhag, Patrik Persson, Mårten Wadenbäck, Kalle Åström, Anders Heyden

Auto-TLDR; Relative Pose Solvers for Visual Indoor UAV Navigation
Abstract Slides Poster Similar
Subspace Clustering for Action Recognition with Covariance Representations and Temporal Pruning
Giancarlo Paoletti, Jacopo Cavazza, Cigdem Beyan, Alessio Del Bue
Auto-TLDR; Unsupervised Learning for Human Action Recognition from Skeletal Data
Subspace Clustering Via Joint Unsupervised Feature Selection
Wenhua Dong, Xiaojun Wu, Hui Li, Zhenhua Feng, Josef Kittler
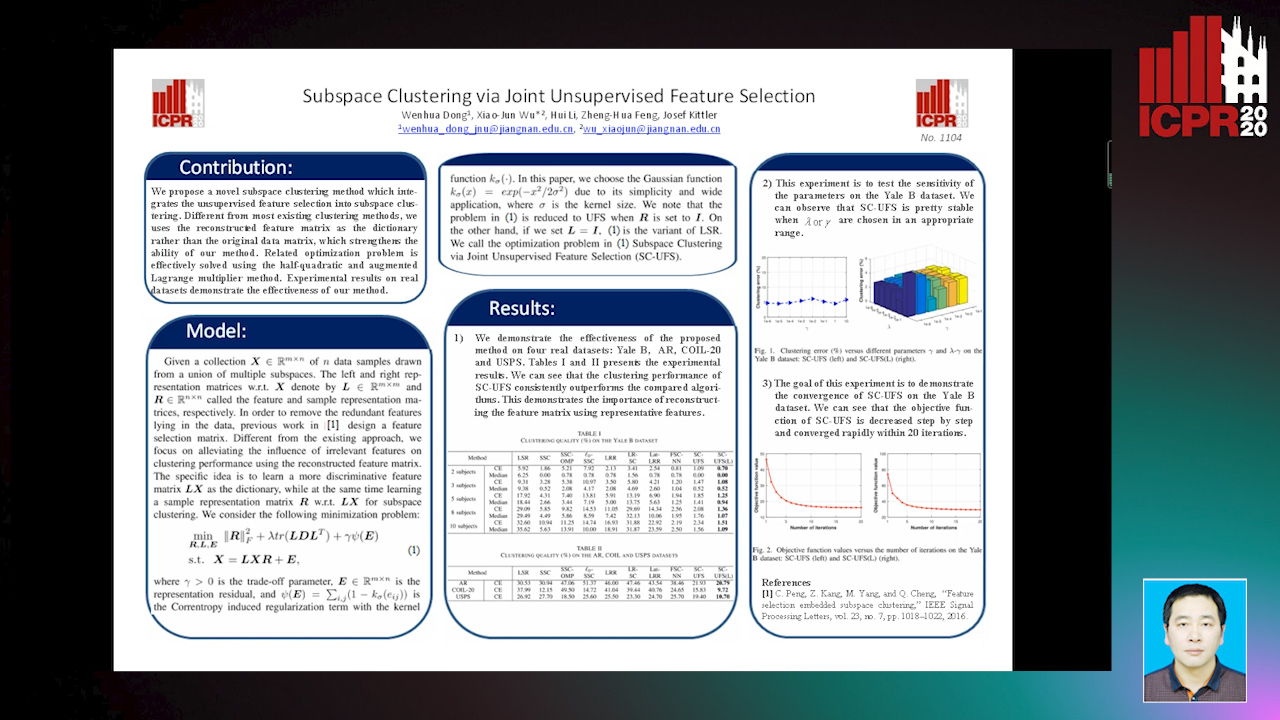
Auto-TLDR; Unsupervised Feature Selection for Subspace Clustering
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Learning to Segment Dynamic Objects Using SLAM Outliers
Dupont Romain, Mohamed Tamaazousti, Hervé Le Borgne

Auto-TLDR; Automatic Segmentation of Dynamic Objects Using SLAM Outliers Using Consensus Inversion
Abstract Slides Poster Similar
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
Scalable Direction-Search-Based Approach to Subspace Clustering
Auto-TLDR; Fast Direction-Search-Based Subspace Clustering
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
A Two-Step Approach to Lidar-Camera Calibration
Yingna Su, Yaqing Ding, Jian Yang, Hui Kong

Auto-TLDR; Closed-Form Calibration of Lidar-camera System for Ego-motion Estimation and Scene Understanding
Abstract Slides Poster Similar
Unconstrained Vision Guided UAV Based Safe Helicopter Landing
Arindam Sikdar, Abhimanyu Sahu, Debajit Sen, Rohit Mahajan, Ananda Chowdhury

Auto-TLDR; Autonomous Helicopter Landing in Hazardous Environments from Unmanned Aerial Images Using Constrained Graph Clustering
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Camera Calibration Using Parallel Line Segments

Auto-TLDR; Closed-Form Calibration of Surveillance Cameras using Parallel 3D Line Segment Projections
Abstract Slides Poster Similar
Temporal Pattern Detection in Time-Varying Graphical Models
Federico Tomasi, Veronica Tozzo, Annalisa Barla
Auto-TLDR; A dynamical network inference model that leverages on kernels to consider general temporal patterns
Abstract Slides Poster Similar
A Plane-Based Approach for Indoor Point Clouds Registration
Ketty Favre, Muriel Pressigout, Luce Morin, Eric Marchand

Auto-TLDR; A plane-based registration approach for indoor environments based on LiDAR data
Abstract Slides Poster Similar
Sparse-Dense Subspace Clustering
Shuai Yang, Wenqi Zhu, Yuesheng Zhu
Auto-TLDR; Sparse-Dense Subspace Clustering with Piecewise Correlation Estimation
Abstract Slides Poster Similar
Sketch-Based Community Detection Via Representative Node Sampling
Mahlagha Sedghi, Andre Beckus, George Atia
Auto-TLDR; Sketch-based Clustering of Community Detection Using a Small Sketch
Abstract Slides Poster Similar
A Globally Optimal Method for the PnP Problem with MRP Rotation Parameterization
Manolis Lourakis, George Terzakis
Auto-TLDR; A Direct least squares, algebraic PnP solver with modified Rodrigues parameters
Learning Dictionaries of Kinematic Primitives for Action Classification
Alessia Vignolo, Nicoletta Noceti, Alessandra Sciutti, Francesca Odone, Giulio Sandini
Auto-TLDR; Action Understanding using Visual Motion Primitives
Abstract Slides Poster Similar
Learning Embeddings for Image Clustering: An Empirical Study of Triplet Loss Approaches
Kalun Ho, Janis Keuper, Franz-Josef Pfreundt, Margret Keuper
Auto-TLDR; Clustering Objectives for K-means and Correlation Clustering Using Triplet Loss
Abstract Slides Poster Similar
Learning Non-Rigid Surface Reconstruction from Spatio-Temporal Image Patches
Matteo Pedone, Abdelrahman Mostafa, Janne Heikkilä

Auto-TLDR; Dense Spatio-Temporal Depth Maps of Deformable Objects from Video Sequences
Abstract Slides Poster Similar
Efficient Game-Theoretic Hypergraph Matching
Auto-TLDR; Hypergraph Matching with Game-Theoretic Clustering
Abstract Slides Poster Similar
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Facetwise Mesh Refinement for Multi-View Stereo
Andrea Romanoni, Matteo Matteucci
Auto-TLDR; Facetwise Refinement of Multi-View Stereo using Delaunay Triangulations
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Learning Knowledge-Rich Sequential Model for Planar Homography Estimation in Aerial Video

Auto-TLDR; Sequential Estimation of Planar Homographic Transformations over Aerial Videos
Abstract Slides Poster Similar
Rotational Adjoint Methods for Learning-Free 3D Human Pose Estimation from IMU Data
Caterina Emilia Agelide Buizza, Yiannis Demiris

Auto-TLDR; Learning-free 3D Human Pose Estimation from Inertial Measurement Unit Data
Multi-View Object Detection Using Epipolar Constraints within Cluttered X-Ray Security Imagery
Brian Kostadinov Shalon Isaac-Medina, Chris G. Willcocks, Toby Breckon

Auto-TLDR; Exploiting Epipolar Constraints for Multi-View Object Detection in X-ray Security Images
Abstract Slides Poster Similar
Object Segmentation Tracking from Generic Video Cues
Amirhossein Kardoost, Sabine Müller, Joachim Weickert, Margret Keuper

Auto-TLDR; A Light-Weight Variational Framework for Video Object Segmentation in Videos
Abstract Slides Poster Similar
STaRFlow: A SpatioTemporal Recurrent Cell for Lightweight Multi-Frame Optical Flow Estimation
Pierre Godet, Alexandre Boulch, Aurélien Plyer, Guy Le Besnerais
Auto-TLDR; STaRFlow: A lightweight CNN-based algorithm for optical flow estimation
Abstract Slides Poster Similar
Sequential Non-Rigid Factorisation for Head Pose Estimation
Stefania Cristina, Kenneth Patrick Camilleri
Auto-TLDR; Sequential Shape-and-Motion Factorisation for Head Pose Estimation in Eye-Gaze Tracking
Abstract Slides Poster Similar
Multi-Scale Keypoint Matching
Auto-TLDR; Multi-Scale Keypoint Matching Using Multi-Scale Information
Abstract Slides Poster Similar
Inner Eye Canthus Localization for Human Body Temperature Screening
Claudio Ferrari, Lorenzo Berlincioni, Marco Bertini, Alberto Del Bimbo
Auto-TLDR; Automatic Localization of the Inner Eye Canthus in Thermal Face Images using 3D Morphable Face Model
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Can You Trust Your Pose? Confidence Estimation in Visual Localization
Luca Ferranti, Xiaotian Li, Jani Boutellier, Juho Kannala

Auto-TLDR; Pose Confidence Estimation in Large-Scale Environments: A Light-weight Approach to Improving Pose Estimation Pipeline
Abstract Slides Poster Similar
Uncertainty Guided Recognition of Tiny Craters on the Moon
Thorsten Wilhelm, Christian Wöhler

Auto-TLDR; Accurately Detecting Tiny Craters in Remote Sensed Images Using Deep Neural Networks
Abstract Slides Poster Similar
Calibration and Absolute Pose Estimation of Trinocular Linear Camera Array for Smart City Applications
Martin Ahrnbom, Mikael Nilsson, Håkan Ardö, Kalle Åström, Oksana Yastremska-Kravchenko, Aliaksei Laureshyn

Auto-TLDR; Trinocular Linear Camera Array Calibration for Traffic Surveillance Applications
Abstract Slides Poster Similar
Fast Subspace Clustering Based on the Kronecker Product
Lei Zhou, Xiao Bai, Liang Zhang, Jun Zhou, Edwin Hancock
Auto-TLDR; Subspace Clustering with Kronecker Product for Large Scale Datasets
Abstract Slides Poster Similar
How to Define a Rejection Class Based on Model Learning?
Sarah Laroui, Xavier Descombes, Aurelia Vernay, Florent Villiers, Francois Villalba, Eric Debreuve
Auto-TLDR; An innovative learning strategy for supervised classification that is able, by design, to reject a sample as not belonging to any of the known classes
Abstract Slides Poster Similar
Leveraging a Weakly Adversarial Paradigm for Joint Learning of Disparity and Confidence Estimation
Matteo Poggi, Fabio Tosi, Filippo Aleotti, Stefano Mattoccia

Auto-TLDR; Joint Training of Deep-Networks for Outlier Detection from Stereo Images
Abstract Slides Poster Similar
Soft Label and Discriminant Embedding Estimation for Semi-Supervised Classification
Fadi Dornaika, Abdullah Baradaaji, Youssof El Traboulsi
Auto-TLDR; Semi-supervised Semi-Supervised Learning for Linear Feature Extraction and Label Propagation
Abstract Slides Poster Similar