GSTO: Gated Scale-Transfer Operation for Multi-Scale Feature Learning in Semantic Segmentation
Zhuoying Wang,
Yongtao Wang,
Zhi Tang,
Yangyan Li,
Ying Chen,
Haibin Ling,
Weisi Lin

Auto-TLDR; Gated Scale-Transfer Operation for Semantic Segmentation
Similar papers
Enhanced Feature Pyramid Network for Semantic Segmentation
Mucong Ye, Ouyang Jinpeng, Ge Chen, Jing Zhang, Xiaogang Yu
Auto-TLDR; EFPN: Enhanced Feature Pyramid Network for Semantic Segmentation
Abstract Slides Poster Similar
Global-Local Attention Network for Semantic Segmentation in Aerial Images
Minglong Li, Lianlei Shan, Weiqiang Wang

Auto-TLDR; GLANet: Global-Local Attention Network for Semantic Segmentation
Abstract Slides Poster Similar
Boundary-Aware Graph Convolution for Semantic Segmentation
Hanzhe Hu, Jinshi Cui, Jinshi Hongbin Zha

Auto-TLDR; Boundary-Aware Graph Convolution for Semantic Segmentation
Abstract Slides Poster Similar
PSDNet: A Balanced Architecture of Accuracy and Parameters for Semantic Segmentation

Auto-TLDR; Pyramid Pooling Module with SE1Cblock and D2SUpsample Network (PSDNet)
Abstract Slides Poster Similar
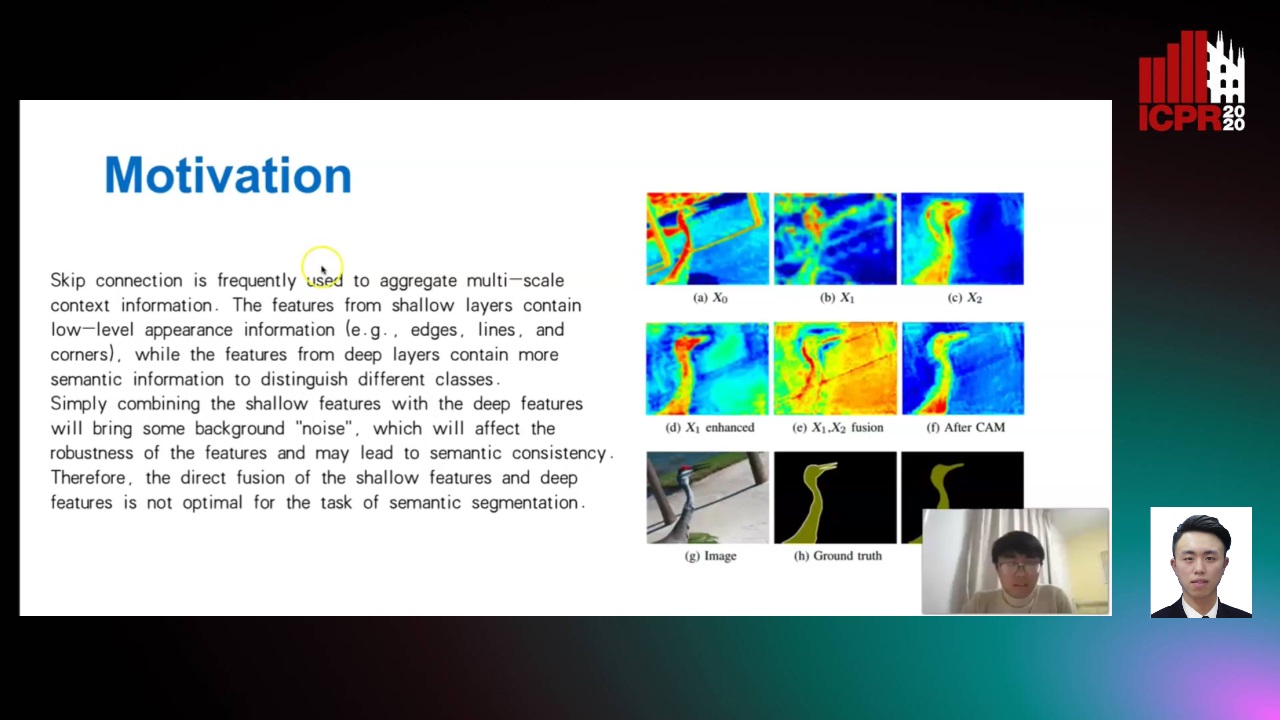
Multi-Direction Convolution for Semantic Segmentation
Dehui Li, Zhiguo Cao, Ke Xian, Xinyuan Qi, Chao Zhang, Hao Lu
Auto-TLDR; Multi-Direction Convolution for Contextual Segmentation
Fast and Accurate Real-Time Semantic Segmentation with Dilated Asymmetric Convolutions
Leonel Rosas-Arias, Gibran Benitez-Garcia, Jose Portillo-Portillo, Gabriel Sanchez-Perez, Keiji Yanai

Auto-TLDR; FASSD-Net: Dilated Asymmetric Pyramidal Fusion for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Semantic Segmentation Refinement Using Entropy and Boundary-guided Monte Carlo Sampling and Directed Regional Search
Zitang Sun, Sei-Ichiro Kamata, Ruojing Wang, Weili Chen
Auto-TLDR; Directed Region Search and Refinement for Semantic Segmentation
Abstract Slides Poster Similar
Real-Time Semantic Segmentation Via Region and Pixel Context Network
Yajun Li, Yazhou Liu, Quansen Sun
Auto-TLDR; A Dual Context Network for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Efficient High-Resolution High-Level-Semantic Representation Learning for Human Pose Estimation
Auto-TLDR; Spatial enhanced separated temporal spatial convolutional neural network
Abstract Slides Poster Similar
Transitional Asymmetric Non-Local Neural Networks for Real-World Dirt Road Segmentation

Auto-TLDR; Transitional Asymmetric Non-Local Neural Networks for Semantic Segmentation on Dirt Roads
Abstract Slides Poster Similar
Attention Pyramid Module for Scene Recognition
Zhinan Qiao, Xiaohui Yuan, Chengyuan Zhuang, Abolfazl Meyarian
Auto-TLDR; Attention Pyramid Module for Multi-Scale Scene Recognition
Abstract Slides Poster Similar
Efficient-Receptive Field Block with Group Spatial Attention Mechanism for Object Detection
Jiacheng Zhang, Zhicheng Zhao, Fei Su
Auto-TLDR; E-RFB: Efficient-Receptive Field Block for Deep Neural Network for Object Detection
Abstract Slides Poster Similar
Learning a Dynamic High-Resolution Network for Multi-Scale Pedestrian Detection
Mengyuan Ding, Shanshan Zhang, Jian Yang

Auto-TLDR; Learningable Dynamic HRNet for Pedestrian Detection
Abstract Slides Poster Similar
Single Image Deblurring Using Bi-Attention Network

Auto-TLDR; Bi-Attention Neural Network for Single Image Deblurring
Encoder-Decoder Based Convolutional Neural Networks with Multi-Scale-Aware Modules for Crowd Counting
Pongpisit Thanasutives, Ken-Ichi Fukui, Masayuki Numao, Boonserm Kijsirikul
Auto-TLDR; M-SFANet and M-SegNet for Crowd Counting Using Multi-Scale Fusion Networks
Abstract Slides Poster Similar
SFPN: Semantic Feature Pyramid Network for Object Detection
Auto-TLDR; SFPN: Semantic Feature Pyramid Network to Address Information Dilution Issue in FPN
Abstract Slides Poster Similar
Deeply-Fused Attentive Network for Stereo Matching
Zuliu Yang, Xindong Ai, Weida Yang, Yong Zhao, Qifei Dai, Fuchi Li

Auto-TLDR; DF-Net: Deep Learning-based Network for Stereo Matching
Abstract Slides Poster Similar
A Boundary-Aware Distillation Network for Compressed Video Semantic Segmentation
Auto-TLDR; A Boundary-Aware Distillation Network for Video Semantic Segmentation
Abstract Slides Poster Similar
CASNet: Common Attribute Support Network for Image Instance and Panoptic Segmentation
Xiaolong Liu, Yuqing Hou, Anbang Yao, Yurong Chen, Keqiang Li

Auto-TLDR; Common Attribute Support Network for instance segmentation and panoptic segmentation
Abstract Slides Poster Similar
Enhancing Semantic Segmentation of Aerial Images with Inhibitory Neurons
Ihsan Ullah, Sean Reilly, Michael Madden
Auto-TLDR; Lateral Inhibition in Deep Neural Networks for Object Recognition and Semantic Segmentation
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
Spatial-Related and Scale-Aware Network for Crowd Counting
Lei Li, Yuan Dong, Hongliang Bai
Auto-TLDR; Spatial Attention for Crowd Counting
Abstract Slides Poster Similar
Progressive Scene Segmentation Based on Self-Attention Mechanism
Yunyi Pan, Yuan Gan, Kun Liu, Yan Zhang

Auto-TLDR; Two-Stage Semantic Scene Segmentation with Self-Attention
Abstract Slides Poster Similar
Context-Aware Residual Module for Image Classification
Auto-TLDR; Context-Aware Residual Module for Image Classification
Abstract Slides Poster Similar
DARN: Deep Attentive Refinement Network for Liver Tumor Segmentation from 3D CT Volume
Yao Zhang, Jiang Tian, Cheng Zhong, Yang Zhang, Zhongchao Shi, Zhiqiang He
Auto-TLDR; Deep Attentive Refinement Network for Liver Tumor Segmentation from 3D Computed Tomography Using Multi-Level Features
Abstract Slides Poster Similar
Attention Stereo Matching Network
Doudou Zhang, Jing Cai, Yanbing Xue, Zan Gao, Hua Zhang

Auto-TLDR; ASM-Net: Attention Stereo Matching with Disparity Refinement
Abstract Slides Poster Similar
Accurate Cell Segmentation in Digital Pathology Images Via Attention Enforced Networks
Zeyi Yao, Kaiqi Li, Guanhong Zhang, Yiwen Luo, Xiaoguang Zhou, Muyi Sun
Auto-TLDR; AENet: Attention Enforced Network for Automatic Cell Segmentation
Abstract Slides Poster Similar
CT-UNet: An Improved Neural Network Based on U-Net for Building Segmentation in Remote Sensing Images
Huanran Ye, Sheng Liu, Kun Jin, Haohao Cheng
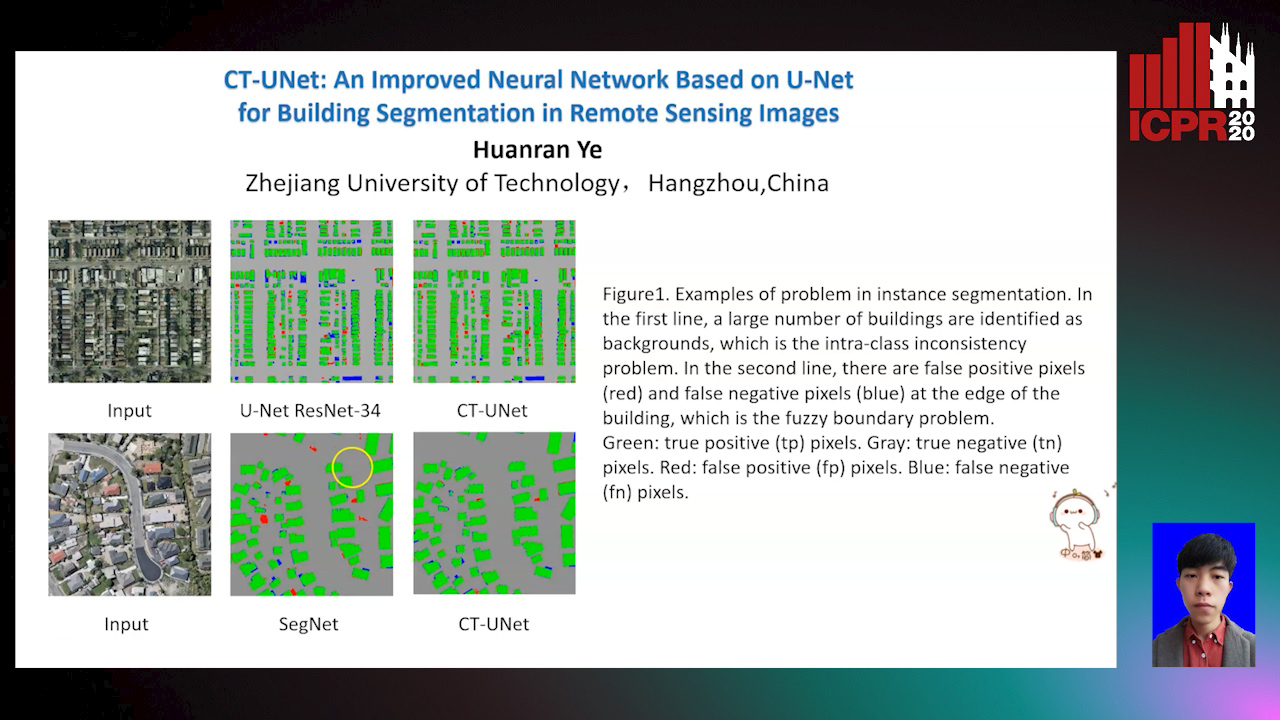
Auto-TLDR; Context-Transfer-UNet: A UNet-based Network for Building Segmentation in Remote Sensing Images
Abstract Slides Poster Similar
P2 Net: Augmented Parallel-Pyramid Net for Attention Guided Pose Estimation
Luanxuan Hou, Jie Cao, Yuan Zhao, Haifeng Shen, Jian Tang, Ran He
Auto-TLDR; Parallel-Pyramid Net with Partial Attention for Human Pose Estimation
Abstract Slides Poster Similar
UHRSNet: A Semantic Segmentation Network Specifically for Ultra-High-Resolution Images
Auto-TLDR; Ultra-High-Resolution Segmentation with Local and Global Feature Fusion
Multiscale Attention-Based Prototypical Network for Few-Shot Semantic Segmentation
Yifei Zhang, Desire Sidibe, Olivier Morel, Fabrice Meriaudeau
Auto-TLDR; Few-shot Semantic Segmentation with Multiscale Feature Attention
Do Not Treat Boundaries and Regions Differently: An Example on Heart Left Atrial Segmentation
Zhou Zhao, Elodie Puybareau, Nicolas Boutry, Thierry Geraud
Auto-TLDR; Attention Full Convolutional Network for Atrial Segmentation using ResNet-101 Architecture
Bidirectional Matrix Feature Pyramid Network for Object Detection
Auto-TLDR; BMFPN: Bidirectional Matrix Feature Pyramid Network for Object Detection
Abstract Slides Poster Similar
Cross-Domain Semantic Segmentation of Urban Scenes Via Multi-Level Feature Alignment
Bin Zhang, Shengjie Zhao, Rongqing Zhang
Auto-TLDR; Cross-Domain Semantic Segmentation Using Generative Adversarial Networks
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Weakly Supervised Body Part Segmentation with Pose Based Part Priors
Zhengyuan Yang, Yuncheng Li, Linjie Yang, Ning Zhang, Jiebo Luo
Auto-TLDR; Weakly Supervised Body Part Segmentation Using Weak Labels
Joint Semantic-Instance Segmentation of 3D Point Clouds: Instance Separation and Semantic Fusion
Auto-TLDR; Joint Semantic Segmentation and Instance Separation of 3D Point Clouds
Abstract Slides Poster Similar
Dynamic Guided Network for Monocular Depth Estimation
Xiaoxia Xing, Yinghao Cai, Yiping Yang, Dayong Wen

Auto-TLDR; DGNet: Dynamic Guidance Upsampling for Self-attention-Decoding for Monocular Depth Estimation
Abstract Slides Poster Similar
Ordinal Depth Classification Using Region-Based Self-Attention
Minh Hieu Phan, Son Lam Phung, Abdesselam Bouzerdoum

Auto-TLDR; Region-based Self-Attention for Multi-scale Depth Estimation from a Single 2D Image
Abstract Slides Poster Similar
PRF-Ped: Multi-Scale Pedestrian Detector with Prior-Based Receptive Field
Yuzhi Tan, Hongxun Yao, Haoran Li, Xiusheng Lu, Haozhe Xie
Auto-TLDR; Bidirectional Feature Enhancement Module for Multi-Scale Pedestrian Detection
Abstract Slides Poster Similar
Hierarchically Aggregated Residual Transformation for Single Image Super Resolution
Auto-TLDR; HARTnet: Hierarchically Aggregated Residual Transformation for Multi-Scale Super-resolution
Abstract Slides Poster Similar
Nighttime Pedestrian Detection Based on Feature Attention and Transformation
Gang Li, Shanshan Zhang, Jian Yang
Auto-TLDR; FAM and FTM: Enhanced Feature Attention Module and Feature Transformation Module for nighttime pedestrian detection
Abstract Slides Poster Similar
Triplet-Path Dilated Network for Detection and Segmentation of General Pathological Images
Jiaqi Luo, Zhicheng Zhao, Fei Su, Limei Guo
Auto-TLDR; Triplet-path Network for One-Stage Object Detection and Segmentation in Pathological Images
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
Dual-Attention Guided Dropblock Module for Weakly Supervised Object Localization
Junhui Yin, Siqing Zhang, Dongliang Chang, Zhanyu Ma, Jun Guo
Auto-TLDR; Dual-Attention Guided Dropblock for Weakly Supervised Object Localization
Abstract Slides Poster Similar
PCANet: Pyramid Context-Aware Network for Retinal Vessel Segmentation
Yi Zhang, Yixuan Chen, Kai Zhang
Auto-TLDR; PCANet: Adaptive Context-Aware Network for Automated Retinal Vessel Segmentation
Abstract Slides Poster Similar
Incorporating Depth Information into Few-Shot Semantic Segmentation
Yifei Zhang, Desire Sidibe, Olivier Morel, Fabrice Meriaudeau

Auto-TLDR; RDNet: A Deep Neural Network for Few-shot Segmentation Using Depth Information
Abstract Slides Poster Similar
Object Detection Model Based on Scene-Level Region Proposal Self-Attention
Yu Quan, Zhixin Li, Canlong Zhang, Huifang Ma
Auto-TLDR; Exploiting Semantic Informations for Object Detection
Abstract Slides Poster Similar