Ordinal Depth Classification Using Region-Based Self-Attention
Minh Hieu Phan,
Son Lam Phung,
Abdesselam Bouzerdoum

Auto-TLDR; Region-based Self-Attention for Multi-scale Depth Estimation from a Single 2D Image
Similar papers
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
Delivering Meaningful Representation for Monocular Depth Estimation
Doyeon Kim, Donggyu Joo, Junmo Kim

Auto-TLDR; Monocular Depth Estimation by Bridging the Context between Encoding and Decoding
Abstract Slides Poster Similar
Dynamic Guided Network for Monocular Depth Estimation
Xiaoxia Xing, Yinghao Cai, Yiping Yang, Dayong Wen

Auto-TLDR; DGNet: Dynamic Guidance Upsampling for Self-attention-Decoding for Monocular Depth Estimation
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
PSDNet: A Balanced Architecture of Accuracy and Parameters for Semantic Segmentation

Auto-TLDR; Pyramid Pooling Module with SE1Cblock and D2SUpsample Network (PSDNet)
Abstract Slides Poster Similar
Real-Time Semantic Segmentation Via Region and Pixel Context Network
Yajun Li, Yazhou Liu, Quansen Sun
Auto-TLDR; A Dual Context Network for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Transitional Asymmetric Non-Local Neural Networks for Real-World Dirt Road Segmentation

Auto-TLDR; Transitional Asymmetric Non-Local Neural Networks for Semantic Segmentation on Dirt Roads
Abstract Slides Poster Similar
Attention Pyramid Module for Scene Recognition
Zhinan Qiao, Xiaohui Yuan, Chengyuan Zhuang, Abolfazl Meyarian
Auto-TLDR; Attention Pyramid Module for Multi-Scale Scene Recognition
Abstract Slides Poster Similar
Global-Local Attention Network for Semantic Segmentation in Aerial Images
Minglong Li, Lianlei Shan, Weiqiang Wang

Auto-TLDR; GLANet: Global-Local Attention Network for Semantic Segmentation
Abstract Slides Poster Similar
Progressive Scene Segmentation Based on Self-Attention Mechanism
Yunyi Pan, Yuan Gan, Kun Liu, Yan Zhang

Auto-TLDR; Two-Stage Semantic Scene Segmentation with Self-Attention
Abstract Slides Poster Similar
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Encoder-Decoder Based Convolutional Neural Networks with Multi-Scale-Aware Modules for Crowd Counting
Pongpisit Thanasutives, Ken-Ichi Fukui, Masayuki Numao, Boonserm Kijsirikul
Auto-TLDR; M-SFANet and M-SegNet for Crowd Counting Using Multi-Scale Fusion Networks
Abstract Slides Poster Similar
Boundary-Aware Graph Convolution for Semantic Segmentation
Hanzhe Hu, Jinshi Cui, Jinshi Hongbin Zha

Auto-TLDR; Boundary-Aware Graph Convolution for Semantic Segmentation
Abstract Slides Poster Similar
Enhanced Feature Pyramid Network for Semantic Segmentation
Mucong Ye, Ouyang Jinpeng, Ge Chen, Jing Zhang, Xiaogang Yu
Auto-TLDR; EFPN: Enhanced Feature Pyramid Network for Semantic Segmentation
Abstract Slides Poster Similar
Context-Aware Residual Module for Image Classification
Auto-TLDR; Context-Aware Residual Module for Image Classification
Abstract Slides Poster Similar
Deeply-Fused Attentive Network for Stereo Matching
Zuliu Yang, Xindong Ai, Weida Yang, Yong Zhao, Qifei Dai, Fuchi Li

Auto-TLDR; DF-Net: Deep Learning-based Network for Stereo Matching
Abstract Slides Poster Similar
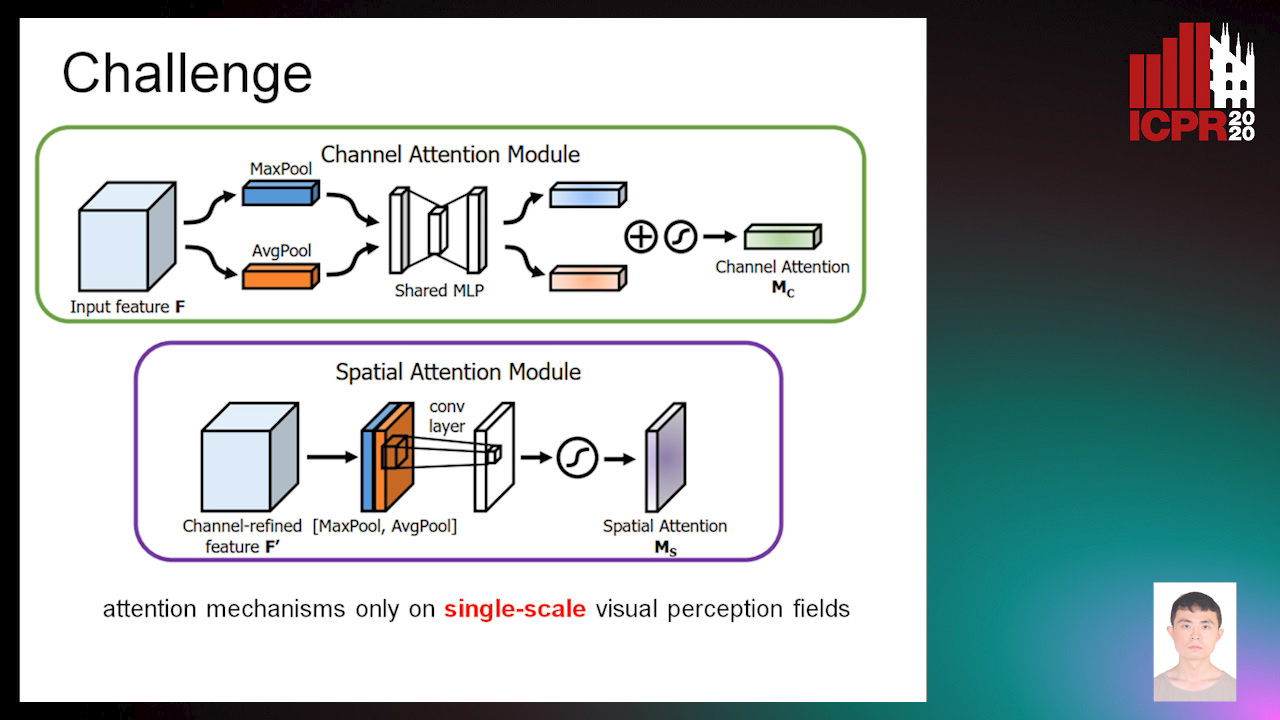
DARN: Deep Attentive Refinement Network for Liver Tumor Segmentation from 3D CT Volume
Yao Zhang, Jiang Tian, Cheng Zhong, Yang Zhang, Zhongchao Shi, Zhiqiang He
Auto-TLDR; Deep Attentive Refinement Network for Liver Tumor Segmentation from 3D Computed Tomography Using Multi-Level Features
Abstract Slides Poster Similar
A Lightweight Network to Learn Optical Flow from Event Data

Auto-TLDR; A lightweight pyramid network with attention mechanism to learn optical flow from events data
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Spatial-Related and Scale-Aware Network for Crowd Counting
Lei Li, Yuan Dong, Hongliang Bai
Auto-TLDR; Spatial Attention for Crowd Counting
Abstract Slides Poster Similar
GSTO: Gated Scale-Transfer Operation for Multi-Scale Feature Learning in Semantic Segmentation
Zhuoying Wang, Yongtao Wang, Zhi Tang, Yangyan Li, Ying Chen, Haibin Ling, Weisi Lin

Auto-TLDR; Gated Scale-Transfer Operation for Semantic Segmentation
Abstract Slides Poster Similar
Attention Stereo Matching Network
Doudou Zhang, Jing Cai, Yanbing Xue, Zan Gao, Hua Zhang

Auto-TLDR; ASM-Net: Attention Stereo Matching with Disparity Refinement
Abstract Slides Poster Similar
Multi-Direction Convolution for Semantic Segmentation
Dehui Li, Zhiguo Cao, Ke Xian, Xinyuan Qi, Chao Zhang, Hao Lu
Auto-TLDR; Multi-Direction Convolution for Contextual Segmentation
Efficient-Receptive Field Block with Group Spatial Attention Mechanism for Object Detection
Jiacheng Zhang, Zhicheng Zhao, Fei Su
Auto-TLDR; E-RFB: Efficient-Receptive Field Block for Deep Neural Network for Object Detection
Abstract Slides Poster Similar
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
Multiscale Attention-Based Prototypical Network for Few-Shot Semantic Segmentation
Yifei Zhang, Desire Sidibe, Olivier Morel, Fabrice Meriaudeau
Auto-TLDR; Few-shot Semantic Segmentation with Multiscale Feature Attention
Single Image Deblurring Using Bi-Attention Network

Auto-TLDR; Bi-Attention Neural Network for Single Image Deblurring
HANet: Hybrid Attention-Aware Network for Crowd Counting
Xinxing Su, Yuchen Yuan, Xiangbo Su, Zhikang Zou, Shilei Wen, Pan Zhou

Auto-TLDR; HANet: Hybrid Attention-Aware Network for Crowd Counting with Adaptive Compensation Loss
Do Not Treat Boundaries and Regions Differently: An Example on Heart Left Atrial Segmentation
Zhou Zhao, Elodie Puybareau, Nicolas Boutry, Thierry Geraud
Auto-TLDR; Attention Full Convolutional Network for Atrial Segmentation using ResNet-101 Architecture
Learning Non-Rigid Surface Reconstruction from Spatio-Temporal Image Patches
Matteo Pedone, Abdelrahman Mostafa, Janne Heikkilä

Auto-TLDR; Dense Spatio-Temporal Depth Maps of Deformable Objects from Video Sequences
Abstract Slides Poster Similar
DA-RefineNet: Dual-Inputs Attention RefineNet for Whole Slide Image Segmentation
Ziqiang Li, Rentuo Tao, Qianrun Wu, Bin Li
Auto-TLDR; DA-RefineNet: A dual-inputs attention network for whole slide image segmentation
Abstract Slides Poster Similar
DEN: Disentangling and Exchanging Network for Depth Completion
You-Feng Wu, Vu-Hoang Tran, Ting-Wei Chang, Wei-Chen Chiu, Ching-Chun Huang
Auto-TLDR; Disentangling and Exchanging Network for Depth Completion
Free-Form Image Inpainting Via Contrastive Attention Network
Xin Ma, Xiaoqiang Zhou, Huaibo Huang, Zhenhua Chai, Xiaolin Wei, Ran He
Auto-TLDR; Self-supervised Siamese inference for image inpainting
Deep Ordinal Regression with Label Diversity
Axel Berg, Magnus Oskarsson, Mark Oconnor

Auto-TLDR; Discrete Regression via Classification for Neural Network Learning
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
6D Pose Estimation with Correlation Fusion
Yi Cheng, Hongyuan Zhu, Ying Sun, Cihan Acar, Wei Jing, Yan Wu, Liyuan Li, Cheston Tan, Joo-Hwee Lim

Auto-TLDR; Intra- and Inter-modality Fusion for 6D Object Pose Estimation with Attention Mechanism
Abstract Slides Poster Similar
Two-Level Attention-Based Fusion Learning for RGB-D Face Recognition
Hardik Uppal, Alireza Sepas-Moghaddam, Michael Greenspan, Ali Etemad
Auto-TLDR; Fused RGB-D Facial Recognition using Attention-Aware Feature Fusion
Abstract Slides Poster Similar
PC-Net: A Deep Network for 3D Point Clouds Analysis
Zhuo Chen, Tao Guan, Yawei Luo, Yuesong Wang

Auto-TLDR; PC-Net: A Hierarchical Neural Network for 3D Point Clouds Analysis
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
ResFPN: Residual Skip Connections in Multi-Resolution Feature Pyramid Networks for Accurate Dense Pixel Matching
Rishav ., René Schuster, Ramy Battrawy, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Resolution Feature Pyramid Networks for Dense Pixel Matching
Orthographic Projection Linear Regression for Single Image 3D Human Pose Estimation
Yahui Zhang, Shaodi You, Theo Gevers

Auto-TLDR; A Deep Neural Network for 3D Human Pose Estimation from a Single 2D Image in the Wild
Abstract Slides Poster Similar
3D Semantic Labeling of Photogrammetry Meshes Based on Active Learning
Mengqi Rong, Shuhan Shen, Zhanyi Hu

Auto-TLDR; 3D Semantic Expression of Urban Scenes Based on Active Learning
Abstract Slides Poster Similar
Learning Natural Thresholds for Image Ranking
Somayeh Keshavarz, Quang Nhat Tran, Richard Souvenir

Auto-TLDR; Image Representation Learning and Label Discretization for Natural Image Ranking
Abstract Slides Poster Similar
Hierarchically Aggregated Residual Transformation for Single Image Super Resolution
Auto-TLDR; HARTnet: Hierarchically Aggregated Residual Transformation for Multi-Scale Super-resolution
Abstract Slides Poster Similar
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
BCAU-Net: A Novel Architecture with Binary Channel Attention Module for MRI Brain Segmentation
Yongpei Zhu, Zicong Zhou, Guojun Liao, Kehong Yuan
Auto-TLDR; BCAU-Net: Binary Channel Attention U-Net for MRI brain segmentation
Abstract Slides Poster Similar
PCANet: Pyramid Context-Aware Network for Retinal Vessel Segmentation
Yi Zhang, Yixuan Chen, Kai Zhang
Auto-TLDR; PCANet: Adaptive Context-Aware Network for Automated Retinal Vessel Segmentation
Abstract Slides Poster Similar