6D Pose Estimation with Correlation Fusion
Yi Cheng,
Hongyuan Zhu,
Ying Sun,
Cihan Acar,
Wei Jing,
Yan Wu,
Liyuan Li,
Cheston Tan,
Joo-Hwee Lim

Auto-TLDR; Intra- and Inter-modality Fusion for 6D Object Pose Estimation with Attention Mechanism
Similar papers
MixedFusion: 6D Object Pose Estimation from Decoupled RGB-Depth Features
Hangtao Feng, Lu Zhang, Xu Yang, Zhiyong Liu

Auto-TLDR; MixedFusion: Combining Color and Point Clouds for 6D Pose Estimation
Abstract Slides Poster Similar
Two-Level Attention-Based Fusion Learning for RGB-D Face Recognition
Hardik Uppal, Alireza Sepas-Moghaddam, Michael Greenspan, Ali Etemad
Auto-TLDR; Fused RGB-D Facial Recognition using Attention-Aware Feature Fusion
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
Dynamic Guided Network for Monocular Depth Estimation
Xiaoxia Xing, Yinghao Cai, Yiping Yang, Dayong Wen

Auto-TLDR; DGNet: Dynamic Guidance Upsampling for Self-attention-Decoding for Monocular Depth Estimation
Abstract Slides Poster Similar
Incorporating Depth Information into Few-Shot Semantic Segmentation
Yifei Zhang, Desire Sidibe, Olivier Morel, Fabrice Meriaudeau

Auto-TLDR; RDNet: A Deep Neural Network for Few-shot Segmentation Using Depth Information
Abstract Slides Poster Similar
A Grid-Based Representation for Human Action Recognition
Soufiane Lamghari, Guillaume-Alexandre Bilodeau, Nicolas Saunier

Auto-TLDR; GRAR: Grid-based Representation for Action Recognition in Videos
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
Towards Efficient 3D Point Cloud Scene Completion Via Novel Depth View Synthesis
Haiyan Wang, Liang Yang, Xuejian Rong, Ying-Li Tian

Auto-TLDR; 3D Point Cloud Completion with Depth View Synthesis and Depth View synthesis
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Orthographic Projection Linear Regression for Single Image 3D Human Pose Estimation
Yahui Zhang, Shaodi You, Theo Gevers

Auto-TLDR; A Deep Neural Network for 3D Human Pose Estimation from a Single 2D Image in the Wild
Abstract Slides Poster Similar
Progressive Scene Segmentation Based on Self-Attention Mechanism
Yunyi Pan, Yuan Gan, Kun Liu, Yan Zhang

Auto-TLDR; Two-Stage Semantic Scene Segmentation with Self-Attention
Abstract Slides Poster Similar
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar
Multi-Stage Attention Based Visual Question Answering
Aakansha Mishra, Ashish Anand, Prithwijit Guha
Auto-TLDR; Alternative Bi-directional Attention for Visual Question Answering
Improving Visual Relation Detection Using Depth Maps
Sahand Sharifzadeh, Sina Moayed Baharlou, Max Berrendorf, Rajat Koner, Volker Tresp
Auto-TLDR; Exploiting Depth Maps for Visual Relation Detection
Abstract Slides Poster Similar
P2 Net: Augmented Parallel-Pyramid Net for Attention Guided Pose Estimation
Luanxuan Hou, Jie Cao, Yuan Zhao, Haifeng Shen, Jian Tang, Ran He
Auto-TLDR; Parallel-Pyramid Net with Partial Attention for Human Pose Estimation
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
MANet: Multimodal Attention Network Based Point-View Fusion for 3D Shape Recognition
Yaxin Zhao, Jichao Jiao, Ning Li
Auto-TLDR; Fusion Network for 3D Shape Recognition based on Multimodal Attention Mechanism
Abstract Slides Poster Similar
Median-Shape Representation Learning for Category-Level Object Pose Estimation in Cluttered Environments
Hiroki Tatemichi, Yasutomo Kawanishi, Daisuke Deguchi, Ichiro Ide, Hiroshi Murase, Ayako Amma
Auto-TLDR; An Occlusion-Robust Pose Estimation Method from a Depth Image
Abstract Slides Poster Similar
Exploring Severe Occlusion: Multi-Person 3D Pose Estimation with Gated Convolution
Renshu Gu, Gaoang Wang, Jenq-Neng Hwang

Auto-TLDR; 3D Human Pose Estimation for Multi-Human Videos with Occlusion
Ordinal Depth Classification Using Region-Based Self-Attention
Minh Hieu Phan, Son Lam Phung, Abdesselam Bouzerdoum

Auto-TLDR; Region-based Self-Attention for Multi-scale Depth Estimation from a Single 2D Image
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
RefiNet: 3D Human Pose Refinement with Depth Maps
Andrea D'Eusanio, Stefano Pini, Guido Borghi, Roberto Vezzani, Rita Cucchiara

Auto-TLDR; RefiNet: A Multi-stage Framework for 3D Human Pose Estimation
What and How? Jointly Forecasting Human Action and Pose
Yanjun Zhu, Yanxia Zhang, Qiong Liu, Andreas Girgensohn

Auto-TLDR; Forecasting Human Actions and Motion Trajectories with Joint Action Classification and Pose Regression
Abstract Slides Poster Similar
Enhanced Vote Network for 3D Object Detection in Point Clouds

Auto-TLDR; A Vote Feature Enhancement Network for 3D Bounding Box Prediction
Abstract Slides Poster Similar
Vision-Based Multi-Modal Framework for Action Recognition
Djamila Romaissa Beddiar, Mourad Oussalah, Brahim Nini
Auto-TLDR; Multi-modal Framework for Human Activity Recognition Using RGB, Depth and Skeleton Data
Abstract Slides Poster Similar
Pose-Aware Multi-Feature Fusion Network for Driver Distraction Recognition
Mingyan Wu, Xi Zhang, Linlin Shen, Hang Yu
Auto-TLDR; Multi-Feature Fusion Network for Distracted Driving Detection using Pose Estimation
Abstract Slides Poster Similar
PEAN: 3D Hand Pose Estimation Adversarial Network
Linhui Sun, Yifan Zhang, Jing Lu, Jian Cheng, Hanqing Lu
Auto-TLDR; PEAN: 3D Hand Pose Estimation with Adversarial Learning Framework
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Deeply-Fused Attentive Network for Stereo Matching
Zuliu Yang, Xindong Ai, Weida Yang, Yong Zhao, Qifei Dai, Fuchi Li

Auto-TLDR; DF-Net: Deep Learning-based Network for Stereo Matching
Abstract Slides Poster Similar
Efficient-Receptive Field Block with Group Spatial Attention Mechanism for Object Detection
Jiacheng Zhang, Zhicheng Zhao, Fei Su
Auto-TLDR; E-RFB: Efficient-Receptive Field Block for Deep Neural Network for Object Detection
Abstract Slides Poster Similar
Attentive Hybrid Feature Based a Two-Step Fusion for Facial Expression Recognition
Jun Weng, Yang Yang, Zichang Tan, Zhen Lei
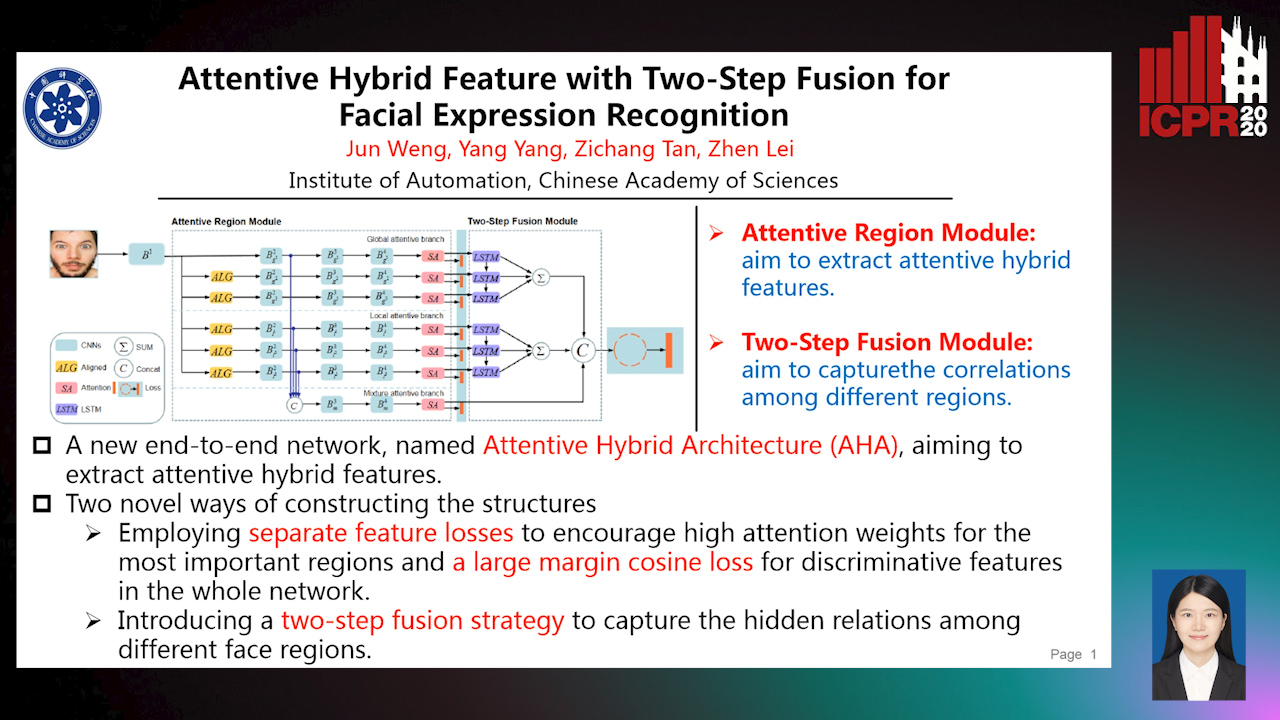
Auto-TLDR; Attentive Hybrid Architecture for Facial Expression Recognition
Abstract Slides Poster Similar
Joint Face Alignment and 3D Face Reconstruction with Efficient Convolution Neural Networks
Keqiang Li, Huaiyu Wu, Xiuqin Shang, Zhen Shen, Gang Xiong, Xisong Dong, Bin Hu, Fei-Yue Wang
Auto-TLDR; Mobile-FRNet: Efficient 3D Morphable Model Alignment and 3D Face Reconstruction from a Single 2D Facial Image
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Boundary-Aware Graph Convolution for Semantic Segmentation
Hanzhe Hu, Jinshi Cui, Jinshi Hongbin Zha

Auto-TLDR; Boundary-Aware Graph Convolution for Semantic Segmentation
Abstract Slides Poster Similar
Self-Supervised Detection and Pose Estimation of Logistical Objects in 3D Sensor Data
Nikolas Müller, Jonas Stenzel, Jian-Jia Chen

Auto-TLDR; A self-supervised and fully automated deep learning approach for object pose estimation using simulated 3D data
Abstract Slides Poster Similar
Object Detection on Monocular Images with Two-Dimensional Canonical Correlation Analysis

Auto-TLDR; Multi-Task Object Detection from Monocular Images Using Multimodal RGB and Depth Data
Abstract Slides Poster Similar
Integrating Historical States and Co-Attention Mechanism for Visual Dialog
Tianling Jiang, Yi Ji, Chunping Liu
Auto-TLDR; Integrating Historical States and Co-attention for Visual Dialog
Abstract Slides Poster Similar
Attention-Oriented Action Recognition for Real-Time Human-Robot Interaction
Ziyang Song, Ziyi Yin, Zejian Yuan, Chong Zhang, Wanchao Chi, Yonggen Ling, Shenghao Zhang
Auto-TLDR; Attention-Oriented Multi-Level Network for Action Recognition in Interaction Scenes
Abstract Slides Poster Similar
Dual Path Multi-Modal High-Order Features for Textual Content Based Visual Question Answering
Yanan Li, Yuetan Lin, Hongrui Zhao, Donghui Wang
Auto-TLDR; TextVQA: An End-to-End Visual Question Answering Model for Text-Based VQA
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
FastCompletion: A Cascade Network with Multiscale Group-Fused Inputs for Real-Time Depth Completion
Ang Li, Zejian Yuan, Yonggen Ling, Wanchao Chi, Shenghao Zhang, Chong Zhang
Auto-TLDR; Efficient Depth Completion with Clustered Hourglass Networks
Abstract Slides Poster Similar
PC-Net: A Deep Network for 3D Point Clouds Analysis
Zhuo Chen, Tao Guan, Yawei Luo, Yuesong Wang

Auto-TLDR; PC-Net: A Hierarchical Neural Network for 3D Point Clouds Analysis
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Do We Really Need Scene-Specific Pose Encoders?
Auto-TLDR; Pose Regression Using Deep Convolutional Networks for Visual Similarity
Multi-Scale Cascading Network with Compact Feature Learning for RGB-Infrared Person Re-Identification
Can Zhang, Hong Liu, Wei Guo, Mang Ye
Auto-TLDR; Multi-Scale Part-Aware Cascading for RGB-Infrared Person Re-identification
Abstract Slides Poster Similar
S-VoteNet: Deep Hough Voting with Spherical Proposal for 3D Object Detection
Yanxian Chen, Huimin Ma, Xi Li, Xiong Luo

Auto-TLDR; S-VoteNet: 3D Object Detection with Spherical Bounded Box Prediction
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Delivering Meaningful Representation for Monocular Depth Estimation
Doyeon Kim, Donggyu Joo, Junmo Kim

Auto-TLDR; Monocular Depth Estimation by Bridging the Context between Encoding and Decoding
Abstract Slides Poster Similar