Median-Shape Representation Learning for Category-Level Object Pose Estimation in Cluttered Environments
Hiroki Tatemichi,
Yasutomo Kawanishi,
Daisuke Deguchi,
Ichiro Ide,
Hiroshi Murase,
Ayako Amma
Auto-TLDR; An Occlusion-Robust Pose Estimation Method from a Depth Image
Similar papers
Ω-GAN: Object Manifold Embedding GAN for Image Generation by Disentangling Parameters into Pose and Shape Manifolds
Yasutomo Kawanishi, Daisuke Deguchi, Ichiro Ide, Hiroshi Murase
Auto-TLDR; Object Manifold Embedding GAN with Parametric Sampling and Object Identity Loss
Abstract Slides Poster Similar
6D Pose Estimation with Correlation Fusion
Yi Cheng, Hongyuan Zhu, Ying Sun, Cihan Acar, Wei Jing, Yan Wu, Liyuan Li, Cheston Tan, Joo-Hwee Lim

Auto-TLDR; Intra- and Inter-modality Fusion for 6D Object Pose Estimation with Attention Mechanism
Abstract Slides Poster Similar
MixedFusion: 6D Object Pose Estimation from Decoupled RGB-Depth Features
Hangtao Feng, Lu Zhang, Xu Yang, Zhiyong Liu

Auto-TLDR; MixedFusion: Combining Color and Point Clouds for 6D Pose Estimation
Abstract Slides Poster Similar
RefiNet: 3D Human Pose Refinement with Depth Maps
Andrea D'Eusanio, Stefano Pini, Guido Borghi, Roberto Vezzani, Rita Cucchiara

Auto-TLDR; RefiNet: A Multi-stage Framework for 3D Human Pose Estimation
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
LFIR2Pose: Pose Estimation from an Extremely Low-Resolution FIR Image Sequence
Saki Iwata, Yasutomo Kawanishi, Daisuke Deguchi, Ichiro Ide, Hiroshi Murase, Tomoyoshi Aizawa
Auto-TLDR; LFIR2Pose: Human Pose Estimation from a Low-Resolution Far-InfraRed Image Sequence
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Self-Supervised Detection and Pose Estimation of Logistical Objects in 3D Sensor Data
Nikolas Müller, Jonas Stenzel, Jian-Jia Chen

Auto-TLDR; A self-supervised and fully automated deep learning approach for object pose estimation using simulated 3D data
Abstract Slides Poster Similar
Exploring Severe Occlusion: Multi-Person 3D Pose Estimation with Gated Convolution
Renshu Gu, Gaoang Wang, Jenq-Neng Hwang

Auto-TLDR; 3D Human Pose Estimation for Multi-Human Videos with Occlusion
Deep Photo Relighting by Integrating Both 2D and 3D Lighting Information
Takashi Machida, Satoru Nakanishi
Auto-TLDR; DPR: Deep Photorelighting for Image Detection/Classification and Data Augmentation
Abstract Slides Poster Similar
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
PEAN: 3D Hand Pose Estimation Adversarial Network
Linhui Sun, Yifan Zhang, Jing Lu, Jian Cheng, Hanqing Lu
Auto-TLDR; PEAN: 3D Hand Pose Estimation with Adversarial Learning Framework
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
Cross-Regional Attention Network for Point Cloud Completion

Auto-TLDR; Learning-based Point Cloud Repair with Graph Convolution
Abstract Slides Poster Similar
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
Orthographic Projection Linear Regression for Single Image 3D Human Pose Estimation
Yahui Zhang, Shaodi You, Theo Gevers

Auto-TLDR; A Deep Neural Network for 3D Human Pose Estimation from a Single 2D Image in the Wild
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
Learning to Implicitly Represent 3D Human Body from Multi-Scale Features and Multi-View Images
Zhongguo Li, Magnus Oskarsson, Anders Heyden
Auto-TLDR; Reconstruction of 3D human bodies from multi-view images using multi-stage end-to-end neural networks
Abstract Slides Poster Similar
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar
Two-Level Attention-Based Fusion Learning for RGB-D Face Recognition
Hardik Uppal, Alireza Sepas-Moghaddam, Michael Greenspan, Ali Etemad
Auto-TLDR; Fused RGB-D Facial Recognition using Attention-Aware Feature Fusion
Abstract Slides Poster Similar
Vision-Based Multi-Modal Framework for Action Recognition
Djamila Romaissa Beddiar, Mourad Oussalah, Brahim Nini
Auto-TLDR; Multi-modal Framework for Human Activity Recognition Using RGB, Depth and Skeleton Data
Abstract Slides Poster Similar
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Object-Oriented Map Exploration and Construction Based on Auxiliary Task Aided DRL
Junzhe Xu, Jianhua Zhang, Shengyong Chen, Honghai Liu

Auto-TLDR; Auxiliary Task Aided Deep Reinforcement Learning for Environment Exploration by Autonomous Robots
HP2IFS: Head Pose Estimation Exploiting Partitioned Iterated Function Systems
Carmen Bisogni, Michele Nappi, Chiara Pero, Stefano Ricciardi
Auto-TLDR; PIFS based head pose estimation using fractal coding theory and Partitioned Iterated Function Systems
Abstract Slides Poster Similar
Rotational Adjoint Methods for Learning-Free 3D Human Pose Estimation from IMU Data
Caterina Emilia Agelide Buizza, Yiannis Demiris

Auto-TLDR; Learning-free 3D Human Pose Estimation from Inertial Measurement Unit Data
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
5D Light Field Synthesis from a Monocular Video
Kyuho Bae, Andre Ivan, Hajime Nagahara, In Kyu Park

Auto-TLDR; Synthesis of Light Field Video from Monocular Video using Deep Learning
Incorporating Depth Information into Few-Shot Semantic Segmentation
Yifei Zhang, Desire Sidibe, Olivier Morel, Fabrice Meriaudeau

Auto-TLDR; RDNet: A Deep Neural Network for Few-shot Segmentation Using Depth Information
Abstract Slides Poster Similar
Towards Efficient 3D Point Cloud Scene Completion Via Novel Depth View Synthesis
Haiyan Wang, Liang Yang, Xuejian Rong, Ying-Li Tian

Auto-TLDR; 3D Point Cloud Completion with Depth View Synthesis and Depth View synthesis
Occlusion-Tolerant and Personalized 3D Human Pose Estimation in RGB Images

Auto-TLDR; Real-Time 3D Human Pose Estimation in BVH using Inverse Kinematics Solver and Neural Networks
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar
User-Independent Gaze Estimation by Extracting Pupil Parameter and Its Mapping to the Gaze Angle

Auto-TLDR; Gaze Point Estimation using Pupil Shape for Generalization
Abstract Slides Poster Similar
DEN: Disentangling and Exchanging Network for Depth Completion
You-Feng Wu, Vu-Hoang Tran, Ting-Wei Chang, Wei-Chen Chiu, Ching-Chun Huang
Auto-TLDR; Disentangling and Exchanging Network for Depth Completion
PA-FlowNet: Pose-Auxiliary Optical Flow Network for Spacecraft Relative Pose Estimation
Zhi Yu Chen, Po-Heng Chen, Kuan-Wen Chen, Chen-Yu Chan
Auto-TLDR; PA-FlowNet: An End-to-End Pose-auxiliary Optical Flow Network for Space Travel and Landing
Abstract Slides Poster Similar
Learning Semantic Representations Via Joint 3D Face Reconstruction and Facial Attribute Estimation
Zichun Weng, Youjun Xiang, Xianfeng Li, Juntao Liang, Wanliang Huo, Yuli Fu
Auto-TLDR; Joint Framework for 3D Face Reconstruction with Facial Attribute Estimation
Abstract Slides Poster Similar
Camera Calibration Using Parallel Line Segments

Auto-TLDR; Closed-Form Calibration of Surveillance Cameras using Parallel 3D Line Segment Projections
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
A Grid-Based Representation for Human Action Recognition
Soufiane Lamghari, Guillaume-Alexandre Bilodeau, Nicolas Saunier

Auto-TLDR; GRAR: Grid-based Representation for Action Recognition in Videos
Abstract Slides Poster Similar
A GAN-Based Blind Inpainting Method for Masonry Wall Images
Yahya Ibrahim, Balázs Nagy, Csaba Benedek
Auto-TLDR; An End-to-End Blind Inpainting Algorithm for Masonry Wall Images
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Joint Supervised and Self-Supervised Learning for 3D Real World Challenges
Antonio Alliegro, Davide Boscaini, Tatiana Tommasi

Auto-TLDR; Self-supervision for 3D Shape Classification and Segmentation in Point Clouds
Lane Detection Based on Object Detection and Image-To-Image Translation
Hiroyuki Komori, Kazunori Onoguchi

Auto-TLDR; Lane Marking and Road Boundary Detection from Monocular Camera Images using Inverse Perspective Mapping
Abstract Slides Poster Similar
A Cross Domain Multi-Modal Dataset for Robust Face Anti-Spoofing
Qiaobin Ji, Shugong Xu, Xudong Chen, Shan Cao, Shunqing Zhang
Auto-TLDR; Cross domain multi-modal FAS dataset GREAT-FASD and several evaluation protocols for academic community
Abstract Slides Poster Similar
PointSpherical: Deep Shape Context for Point Cloud Learning in Spherical Coordinates
Hua Lin, Bin Fan, Yongcheng Liu, Yirong Yang, Zheng Pan, Jianbo Shi, Chunhong Pan, Huiwen Xie

Auto-TLDR; Spherical Hierarchical Modeling of 3D Point Cloud
Abstract Slides Poster Similar
EdgeNet: Semantic Scene Completion from a Single RGB-D Image
Aloisio Dourado, Teofilo De Campos, Adrian Hilton, Hansung Kim

Auto-TLDR; Semantic Scene Completion using 3D Depth and RGB Information
Abstract Slides Poster Similar
Boundary Guided Image Translation for Pose Estimation from Ultra-Low Resolution Thermal Sensor
Kohei Kurihara, Tianren Wang, Teng Zhang, Brian Carrington Lovell
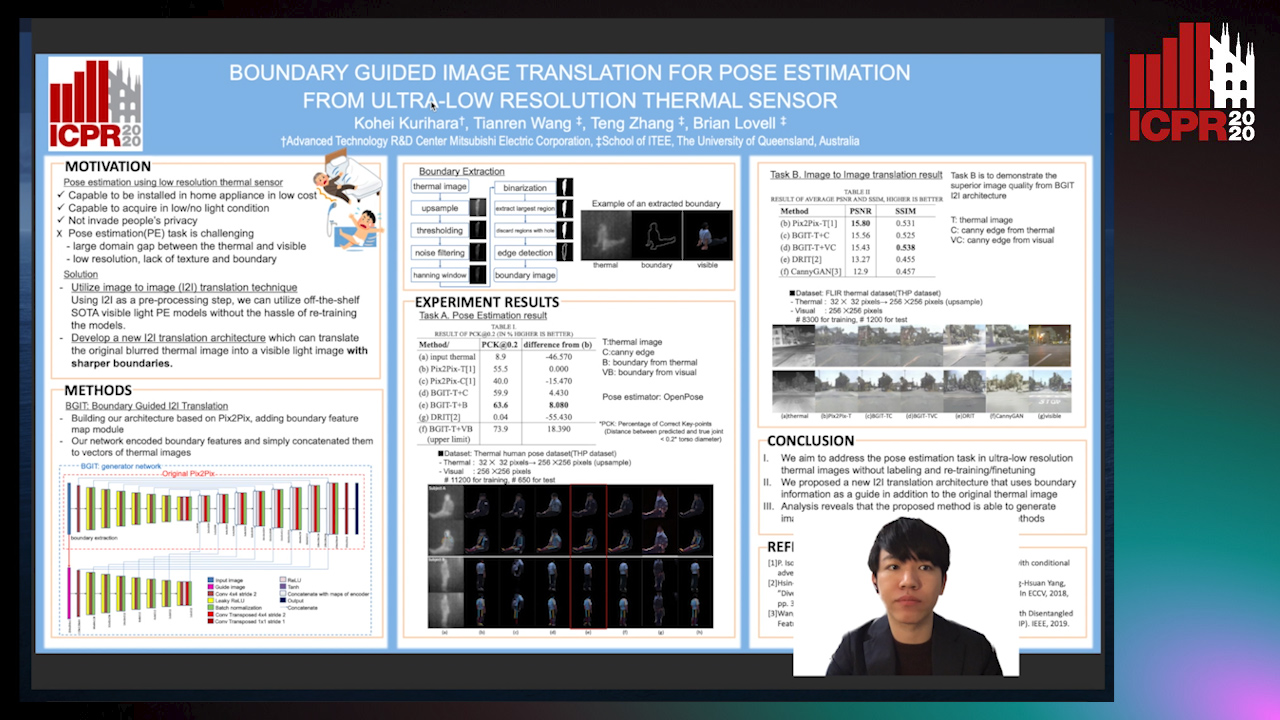
Auto-TLDR; Pose Estimation on Low-Resolution Thermal Images Using Image-to-Image Translation Architecture
Abstract Slides Poster Similar
Distortion-Adaptive Grape Bunch Counting for Omnidirectional Images
Ryota Akai, Yuzuko Utsumi, Yuka Miwa, Masakazu Iwamura, Koichi Kise
Auto-TLDR; Object Counting for Omnidirectional Images Using Stereographic Projection
Do We Really Need Scene-Specific Pose Encoders?
Auto-TLDR; Pose Regression Using Deep Convolutional Networks for Visual Similarity