Deep Photo Relighting by Integrating Both 2D and 3D Lighting Information
Takashi Machida,
Satoru Nakanishi
Auto-TLDR; DPR: Deep Photorelighting for Image Detection/Classification and Data Augmentation
Similar papers
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
SIDGAN: Single Image Dehazing without Paired Supervision
Pan Wei, Xin Wang, Lei Wang, Ji Xiang, Zihan Wang
Auto-TLDR; DehazeGAN: An End-to-End Generative Adversarial Network for Image Dehazing
Abstract Slides Poster Similar
UCCTGAN: Unsupervised Clothing Color Transformation Generative Adversarial Network
Shuming Sun, Xiaoqiang Li, Jide Li
Auto-TLDR; An Unsupervised Clothing Color Transformation Generative Adversarial Network
Abstract Slides Poster Similar
5D Light Field Synthesis from a Monocular Video
Kyuho Bae, Andre Ivan, Hajime Nagahara, In Kyu Park

Auto-TLDR; Synthesis of Light Field Video from Monocular Video using Deep Learning
Boundary Guided Image Translation for Pose Estimation from Ultra-Low Resolution Thermal Sensor
Kohei Kurihara, Tianren Wang, Teng Zhang, Brian Carrington Lovell
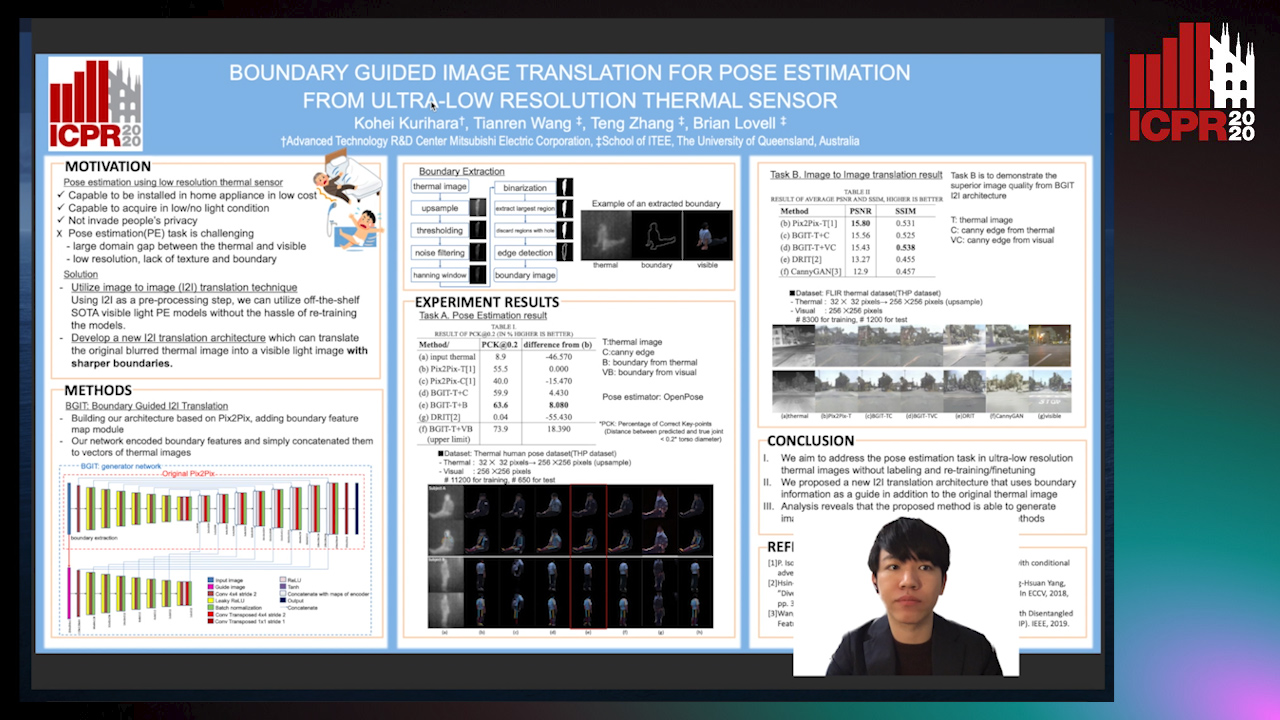
Auto-TLDR; Pose Estimation on Low-Resolution Thermal Images Using Image-to-Image Translation Architecture
Abstract Slides Poster Similar
Semantic-Guided Inpainting Network for Complex Urban Scenes Manipulation
Pierfrancesco Ardino, Yahui Liu, Elisa Ricci, Bruno Lepri, Marco De Nadai

Auto-TLDR; Semantic-Guided Inpainting of Complex Urban Scene Using Semantic Segmentation and Generation
Abstract Slides Poster Similar
GarmentGAN: Photo-Realistic Adversarial Fashion Transfer
Amir Hossein Raffiee, Michael Sollami

Auto-TLDR; GarmentGAN: A Generative Adversarial Network for Image-Based Garment Transfer
Abstract Slides Poster Similar
SECI-GAN: Semantic and Edge Completion for Dynamic Objects Removal
Francesco Pinto, Andrea Romanoni, Matteo Matteucci, Phil Torr
Auto-TLDR; SECI-GAN: Semantic and Edge Conditioned Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
Lane Detection Based on Object Detection and Image-To-Image Translation
Hiroyuki Komori, Kazunori Onoguchi

Auto-TLDR; Lane Marking and Road Boundary Detection from Monocular Camera Images using Inverse Perspective Mapping
Abstract Slides Poster Similar
Thermal Image Enhancement Using Generative Adversarial Network for Pedestrian Detection
Mohamed Amine Marnissi, Hajer Fradi, Anis Sahbani, Najoua Essoukri Ben Amara
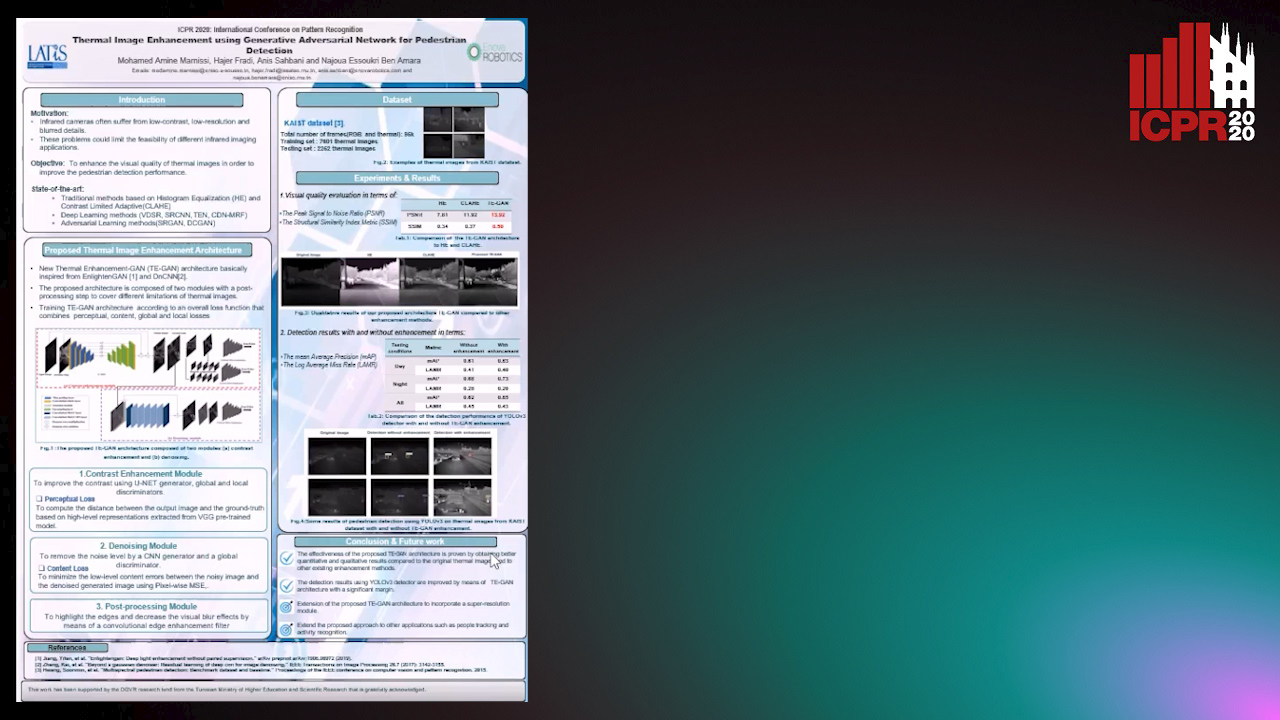
Auto-TLDR; Improving Visual Quality of Infrared Images for Pedestrian Detection Using Generative Adversarial Network
Abstract Slides Poster Similar
Mask-Based Style-Controlled Image Synthesis Using a Mask Style Encoder
Jaehyeong Cho, Wataru Shimoda, Keiji Yanai
Auto-TLDR; Style-controlled Image Synthesis from Semantic Segmentation masks using GANs
Abstract Slides Poster Similar
A GAN-Based Blind Inpainting Method for Masonry Wall Images
Yahya Ibrahim, Balázs Nagy, Csaba Benedek
Auto-TLDR; An End-to-End Blind Inpainting Algorithm for Masonry Wall Images
Abstract Slides Poster Similar
Cycle-Consistent Adversarial Networks and Fast Adaptive Bi-Dimensional Empirical Mode Decomposition for Style Transfer
Elissavet Batziou, Petros Alvanitopoulos, Konstantinos Ioannidis, Ioannis Patras, Stefanos Vrochidis, Ioannis Kompatsiaris
Auto-TLDR; FABEMD: Fast and Adaptive Bidimensional Empirical Mode Decomposition for Style Transfer on Images
Abstract Slides Poster Similar
Stylized-Colorization for Line Arts
Tzu-Ting Fang, Minh Duc Vo, Akihiro Sugimoto, Shang-Hong Lai
Auto-TLDR; Stylized-colorization using GAN-based End-to-End Model for Anime
Abstract Slides Poster Similar
Removing Raindrops from a Single Image Using Synthetic Data
Yoshihito Kokubo, Shusaku Asada, Hirotaka Maruyama, Masaru Koide, Kohei Yamamoto, Yoshihisa Suetsugu
Auto-TLDR; Raindrop Removal Using Synthetic Raindrop Data
Abstract Slides Poster Similar
Local Facial Attribute Transfer through Inpainting
Ricard Durall, Franz-Josef Pfreundt, Janis Keuper
Auto-TLDR; Attribute Transfer Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
Deep Realistic Novel View Generation for City-Scale Aerial Images
Koundinya Nouduri, Ke Gao, Joshua Fraser, Shizeng Yao, Hadi Aliakbarpour, Filiz Bunyak, Kannappan Palaniappan
Auto-TLDR; End-to-End 3D Voxel Renderer for Multi-View Stereo Data Generation and Evaluation
Abstract Slides Poster Similar
Semi-Supervised Outdoor Image Generation Conditioned on Weather Signals
Sota Kawakami, Kei Okada, Naoko Nitta, Kazuaki Nakamura, Noboru Babaguchi
Auto-TLDR; Semi-supervised Generative Adversarial Network for Prediction of Weather Signals from Outdoor Images
Abstract Slides Poster Similar
Efficient Shadow Detection and Removal Using Synthetic Data with Domain Adaptation
Rui Guo, Babajide Ayinde, Hao Sun
Auto-TLDR; Shadow Detection and Removal with Domain Adaptation and Synthetic Image Database
Novel View Synthesis from a 6-DoF Pose by Two-Stage Networks
Xiang Guo, Bo Li, Yuchao Dai, Tongxin Zhang, Hui Deng
Auto-TLDR; Novel View Synthesis from a 6-DoF Pose Using Generative Adversarial Network
Abstract Slides Poster Similar
Ω-GAN: Object Manifold Embedding GAN for Image Generation by Disentangling Parameters into Pose and Shape Manifolds
Yasutomo Kawanishi, Daisuke Deguchi, Ichiro Ide, Hiroshi Murase
Auto-TLDR; Object Manifold Embedding GAN with Parametric Sampling and Object Identity Loss
Abstract Slides Poster Similar
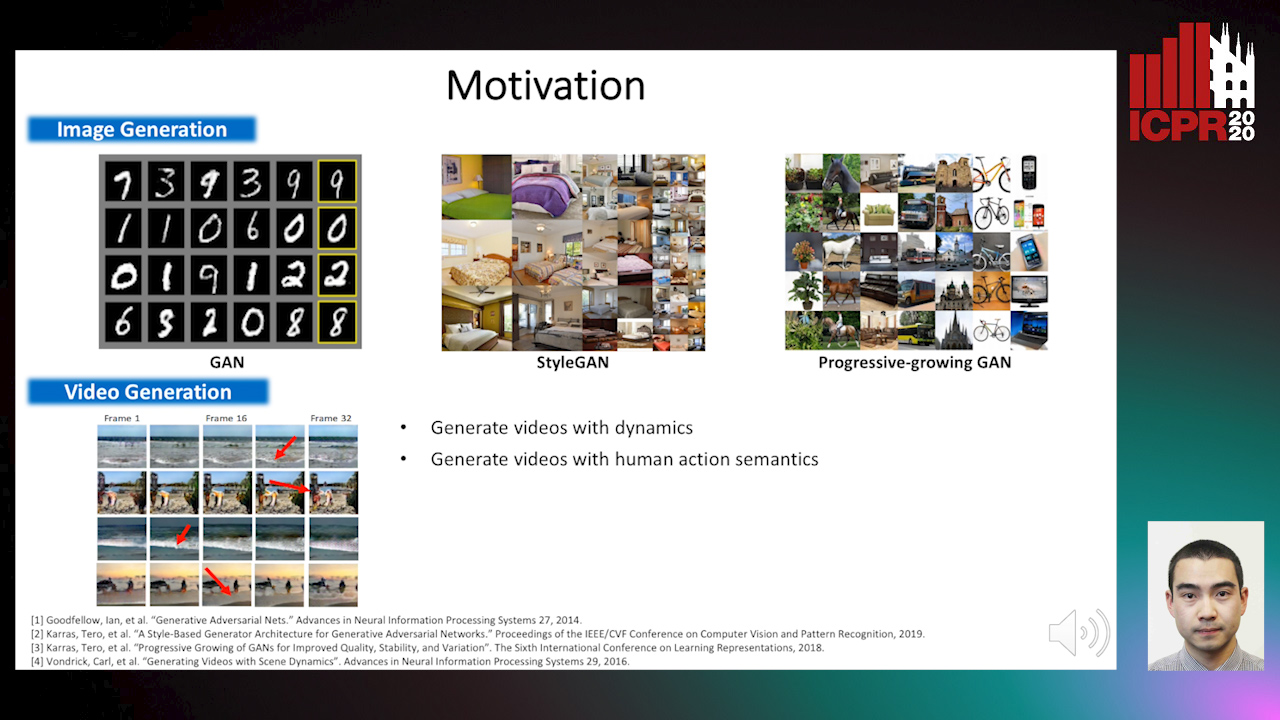
Let's Play Music: Audio-Driven Performance Video Generation
Hao Zhu, Yi Li, Feixia Zhu, Aihua Zheng, Ran He
Auto-TLDR; APVG: Audio-driven Performance Video Generation Using Structured Temporal UNet
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Towards Efficient 3D Point Cloud Scene Completion Via Novel Depth View Synthesis
Haiyan Wang, Liang Yang, Xuejian Rong, Ying-Li Tian

Auto-TLDR; 3D Point Cloud Completion with Depth View Synthesis and Depth View synthesis
The Role of Cycle Consistency for Generating Better Human Action Videos from a Single Frame
Auto-TLDR; Generating Videos with Human Action Semantics using Cycle Constraints
Abstract Slides Poster Similar
MBD-GAN: Model-Based Image Deblurring with a Generative Adversarial Network
Auto-TLDR; Model-Based Deblurring GAN for Inverse Imaging
Abstract Slides Poster Similar
Towards Artifacts-Free Image Defogging
Gabriele Graffieti, Davide Maltoni
Auto-TLDR; CurL-Defog: Learning Based Defogging with CycleGAN and HArD
A NoGAN Approach for Image and Video Restoration and Compression Artifact Removal
Mameli Filippo, Marco Bertini, Leonardo Galteri, Alberto Del Bimbo
Auto-TLDR; Deep Neural Network for Image and Video Compression Artifact Removal and Restoration
Robust Pedestrian Detection in Thermal Imagery Using Synthesized Images
My Kieu, Lorenzo Berlincioni, Leonardo Galteri, Marco Bertini, Andrew Bagdanov, Alberto Del Bimbo

Auto-TLDR; Improving Pedestrian Detection in the thermal domain using Generative Adversarial Network
Abstract Slides Poster Similar
Continuous Learning of Face Attribute Synthesis
Ning Xin, Shaohui Xu, Fangzhe Nan, Xiaoli Dong, Weijun Li, Yuanzhou Yao
Auto-TLDR; Continuous Learning for Face Attribute Synthesis
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Median-Shape Representation Learning for Category-Level Object Pose Estimation in Cluttered Environments
Hiroki Tatemichi, Yasutomo Kawanishi, Daisuke Deguchi, Ichiro Ide, Hiroshi Murase, Ayako Amma
Auto-TLDR; An Occlusion-Robust Pose Estimation Method from a Depth Image
Abstract Slides Poster Similar
Free-Form Image Inpainting Via Contrastive Attention Network
Xin Ma, Xiaoqiang Zhou, Huaibo Huang, Zhenhua Chai, Xiaolin Wei, Ran He
Auto-TLDR; Self-supervised Siamese inference for image inpainting
Improving Image Matching with Varied Illumination
Auto-TLDR; Optimizing Feature Matching for Stereo Image Pairs by Stereo Illumination
Abstract Slides Poster Similar
Attributes Aware Face Generation with Generative Adversarial Networks
Zheng Yuan, Jie Zhang, Shiguang Shan, Xilin Chen
Auto-TLDR; AFGAN: A Generative Adversarial Network for Attributes Aware Face Image Generation
Abstract Slides Poster Similar
Automatical Enhancement and Denoising of Extremely Low-Light Images
Yuda Song, Yunfang Zhu, Xin Du
Auto-TLDR; INSNet: Illumination and Noise Separation Network for Low-Light Image Restoring
Abstract Slides Poster Similar
VITON-GT: An Image-Based Virtual Try-On Model with Geometric Transformations
Matteo Fincato, Federico Landi, Marcella Cornia, Fabio Cesari, Rita Cucchiara
Auto-TLDR; VITON-GT: An Image-based Virtual Try-on Architecture for Fashion Catalogs
Abstract Slides Poster Similar
High Resolution Face Age Editing
Xu Yao, Gilles Puy, Alasdair Newson, Yann Gousseau, Pierre Hellier
Auto-TLDR; An Encoder-Decoder Architecture for Face Age editing on High Resolution Images
Abstract Slides Poster Similar
Ghost Target Detection in 3D Radar Data Using Point Cloud Based Deep Neural Network
Mahdi Chamseddine, Jason Rambach, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Point Based Deep Learning for Ghost Target Detection in 3D Radar Point Clouds
Abstract Slides Poster Similar
Adaptive Image Compression Using GAN Based Semantic-Perceptual Residual Compensation
Ruojing Wang, Zitang Sun, Sei-Ichiro Kamata, Weili Chen
Auto-TLDR; Adaptive Image Compression using GAN based Semantic-Perceptual Residual Compensation
Abstract Slides Poster Similar
Detail Fusion GAN: High-Quality Translation for Unpaired Images with GAN-Based Data Augmentation
Ling Li, Yaochen Li, Chuan Wu, Hang Dong, Peilin Jiang, Fei Wang

Auto-TLDR; Data Augmentation with GAN-based Generative Adversarial Network
Abstract Slides Poster Similar
Surface Material Dataset for Robotics Applications (SMDRA): A Dataset with Friction Coefficient and RGB-D for Surface Segmentation
Donghun Noh, Hyunwoo Nam, Min Sung Ahn, Hosik Chae, Sangjoon Lee, Kyle Gillespie, Dennis Hong
Auto-TLDR; A Surface Material Dataset for Robotics Applications
Abstract Slides Poster Similar
Polarimetric Image Augmentation
Marc Blanchon, Fabrice Meriaudeau, Olivier Morel, Ralph Seulin, Desire Sidibe

Auto-TLDR; Polarimetric Augmentation for Deep Learning in Robotics Applications
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
Global Image Sentiment Transfer
Jie An, Tianlang Chen, Songyang Zhang, Jiebo Luo
Auto-TLDR; Image Sentiment Transfer Using DenseNet121 Architecture
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Derivation of Geometrically and Semantically Annotated UAV Datasets at Large Scales from 3D City Models
Sidi Wu, Lukas Liebel, Marco Körner

Auto-TLDR; Large-Scale Dataset of Synthetic UAV Imagery for Geometric and Semantic Annotation
Abstract Slides Poster Similar
Residual Learning of Video Frame Interpolation Using Convolutional LSTM
Auto-TLDR; Video Frame Interpolation Using Residual Learning and Convolutional LSTMs
Abstract Slides Poster Similar