Lane Detection Based on Object Detection and Image-To-Image Translation
Hiroyuki Komori,
Kazunori Onoguchi

Auto-TLDR; Lane Marking and Road Boundary Detection from Monocular Camera Images using Inverse Perspective Mapping
Similar papers
RONELD: Robust Neural Network Output Enhancement for Active Lane Detection
Zhe Ming Chng, Joseph Mun Hung Lew, Jimmy Addison Lee

Auto-TLDR; Real-Time Robust Neural Network Output Enhancement for Active Lane Detection
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
PolyLaneNet: Lane Estimation Via Deep Polynomial Regression
Talles Torres, Rodrigo Berriel, Thiago Paixão, Claudine Badue, Alberto F. De Souza, Thiago Oliveira-Santos
Auto-TLDR; Real-Time Lane Detection with Deep Polynomial Regression
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
Distortion-Adaptive Grape Bunch Counting for Omnidirectional Images
Ryota Akai, Yuzuko Utsumi, Yuka Miwa, Masakazu Iwamura, Koichi Kise
Auto-TLDR; Object Counting for Omnidirectional Images Using Stereographic Projection
Street-Map Based Validation of Semantic Segmentation in Autonomous Driving
Laura Von Rueden, Tim Wirtz, Fabian Hueger, Jan David Schneider, Nico Piatkowski, Christian Bauckhage

Auto-TLDR; Semantic Segmentation Mask Validation Using A-priori Knowledge from Street Maps
Abstract Slides Poster Similar
Real-Time End-To-End Lane ID Estimation Using Recurrent Networks
Ibrahim Halfaoui, Fahd Bouzaraa, Onay Urfalioglu

Auto-TLDR; Real-Time, Vision-Only Lane Identification Using Monocular Camera
Abstract Slides Poster Similar
Detecting Objects with High Object Region Percentage
Fen Fang, Qianli Xu, Liyuan Li, Ying Gu, Joo-Hwee Lim

Auto-TLDR; Faster R-CNN for High-ORP Object Detection
Abstract Slides Poster Similar
Multi-View Object Detection Using Epipolar Constraints within Cluttered X-Ray Security Imagery
Brian Kostadinov Shalon Isaac-Medina, Chris G. Willcocks, Toby Breckon

Auto-TLDR; Exploiting Epipolar Constraints for Multi-View Object Detection in X-ray Security Images
Abstract Slides Poster Similar
Uncertainty Guided Recognition of Tiny Craters on the Moon
Thorsten Wilhelm, Christian Wöhler

Auto-TLDR; Accurately Detecting Tiny Craters in Remote Sensed Images Using Deep Neural Networks
Abstract Slides Poster Similar
ACRM: Attention Cascade R-CNN with Mix-NMS for Metallic Surface Defect Detection
Junting Fang, Xiaoyang Tan, Yuhui Wang

Auto-TLDR; Attention Cascade R-CNN with Mix Non-Maximum Suppression for Robust Metal Defect Detection
Abstract Slides Poster Similar
Construction Worker Hardhat-Wearing Detection Based on an Improved BiFPN
Chenyang Zhang, Zhiqiang Tian, Jingyi Song, Yaoyue Zheng, Bo Xu

Auto-TLDR; A One-Stage Object Detection Method for Hardhat-Wearing in Construction Site
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
CASNet: Common Attribute Support Network for Image Instance and Panoptic Segmentation
Xiaolong Liu, Yuqing Hou, Anbang Yao, Yurong Chen, Keqiang Li

Auto-TLDR; Common Attribute Support Network for instance segmentation and panoptic segmentation
Abstract Slides Poster Similar
Deep Photo Relighting by Integrating Both 2D and 3D Lighting Information
Takashi Machida, Satoru Nakanishi
Auto-TLDR; DPR: Deep Photorelighting for Image Detection/Classification and Data Augmentation
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
DeepBEV: A Conditional Adversarial Network for Bird’s Eye View Generation
Auto-TLDR; A Generative Adversarial Network for Semantic Object Representation in Autonomous Vehicles
Abstract Slides Poster Similar
Sensor-Independent Pedestrian Detection for Personal Mobility Vehicles in Walking Space Using Dataset Generated by Simulation
Takahiro Shimizu, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Motoki Shino

Auto-TLDR; CosPointPillars: A 3D Object Detection Method for Pedestrian Detection in Walking Spaces
Abstract Slides Poster Similar
Thermal Image Enhancement Using Generative Adversarial Network for Pedestrian Detection
Mohamed Amine Marnissi, Hajer Fradi, Anis Sahbani, Najoua Essoukri Ben Amara
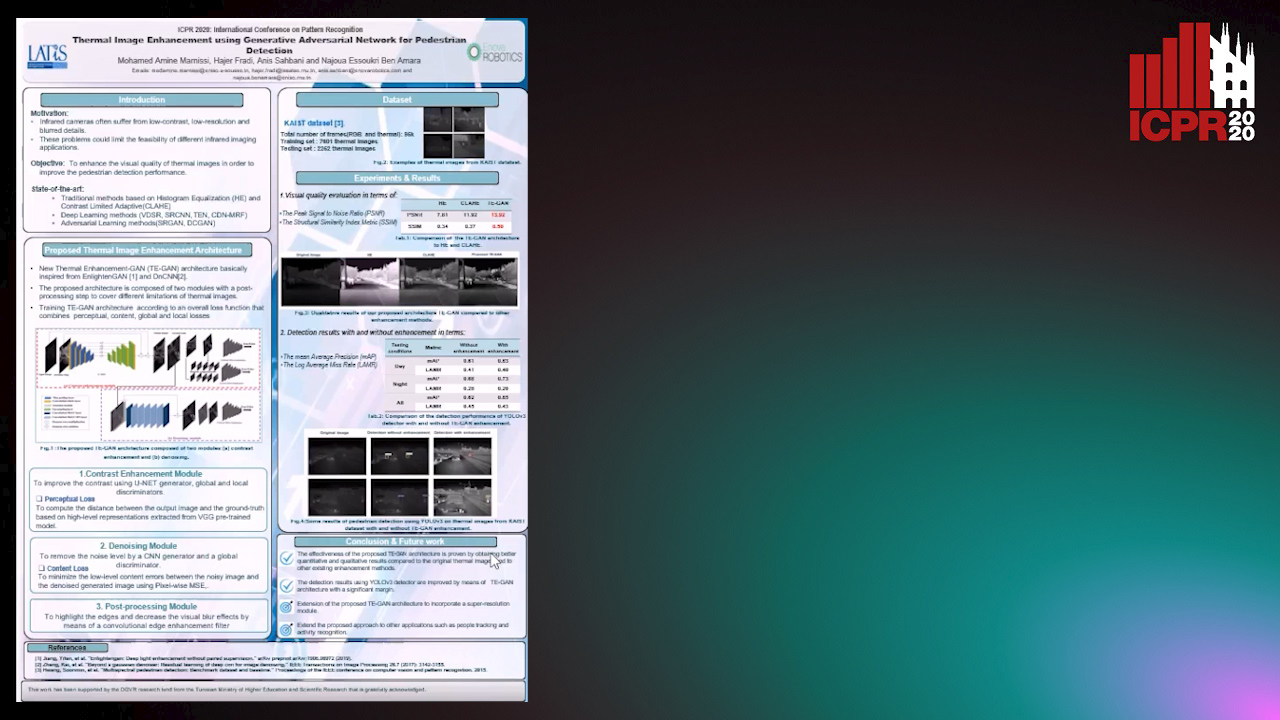
Auto-TLDR; Improving Visual Quality of Infrared Images for Pedestrian Detection Using Generative Adversarial Network
Abstract Slides Poster Similar
Machine-Learned Regularization and Polygonization of Building Segmentation Masks
Stefano Zorzi, Ksenia Bittner, Friedrich Fraundorfer

Auto-TLDR; Automatic Regularization and Polygonization of Building Segmentation masks using Generative Adversarial Network
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Enhancing Depth Quality of Stereo Vision Using Deep Learning-Based Prior Information of the Driving Environment
Weifu Li, Vijay John, Seiichi Mita
Auto-TLDR; A Novel Post-processing Mathematical Framework for Stereo Vision
Abstract Slides Poster Similar
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
End-To-End Deep Learning Methods for Automated Damage Detection in Extreme Events at Various Scales
Yongsheng Bai, Alper Yilmaz, Halil Sezen

Auto-TLDR; Robust Mask R-CNN for Crack Detection in Extreme Events
Abstract Slides Poster Similar
EAGLE: Large-Scale Vehicle Detection Dataset in Real-World Scenarios Using Aerial Imagery
Seyed Majid Azimi, Reza Bahmanyar, Corentin Henry, Kurz Franz

Auto-TLDR; EAGLE: A Large-Scale Dataset for Multi-class Vehicle Detection with Object Orientation Information in Airborne Imagery
Small Object Detection by Generative and Discriminative Learning
Yi Gu, Jie Li, Chentao Wu, Weijia Jia, Jianping Chen
Auto-TLDR; Generative and Discriminative Learning for Small Object Detection
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
SyNet: An Ensemble Network for Object Detection in UAV Images

Auto-TLDR; SyNet: Combining Multi-Stage and Single-Stage Object Detection for Aerial Images
Polarimetric Image Augmentation
Marc Blanchon, Fabrice Meriaudeau, Olivier Morel, Ralph Seulin, Desire Sidibe

Auto-TLDR; Polarimetric Augmentation for Deep Learning in Robotics Applications
Iterative Bounding Box Annotation for Object Detection
Bishwo Adhikari, Heikki Juhani Huttunen
Auto-TLDR; Semi-Automatic Bounding Box Annotation for Object Detection in Digital Images
Abstract Slides Poster Similar
Multimodal End-To-End Learning for Autonomous Steering in Adverse Road and Weather Conditions
Jyri Sakari Maanpää, Josef Taher, Petri Manninen, Leo Pakola, Iaroslav Melekhov, Juha Hyyppä

Auto-TLDR; End-to-End Learning for Autonomous Steering in Adverse Road and Weather Conditions with Lidar Data
Abstract Slides Poster Similar
Scene Text Detection with Selected Anchors
Anna Zhu, Hang Du, Shengwu Xiong
Auto-TLDR; AS-RPN: Anchor Selection-based Region Proposal Network for Scene Text Detection
Abstract Slides Poster Similar
Semantic Segmentation for Pedestrian Detection from Motion in Temporal Domain

Auto-TLDR; Motion Profile: Recognizing Pedestrians along with their Motion Directions in a Temporal Way
Abstract Slides Poster Similar
Object Detection on Monocular Images with Two-Dimensional Canonical Correlation Analysis

Auto-TLDR; Multi-Task Object Detection from Monocular Images Using Multimodal RGB and Depth Data
Abstract Slides Poster Similar
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
MagnifierNet: Learning Efficient Small-Scale Pedestrian Detector towards Multiple Dense Regions
Qi Cheng, Mingqin Chen, Yingjie Wu, Fei Chen, Shiping Lin

Auto-TLDR; MagnifierNet: A Simple but Effective Small-Scale Pedestrian Detection Towards Multiple Dense Regions
Abstract Slides Poster Similar
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Small Object Detection Leveraging on Simultaneous Super-Resolution
Hong Ji, Zhi Gao, Xiaodong Liu, Tiancan Mei

Auto-TLDR; Super-Resolution via Generative Adversarial Network for Small Object Detection
Robust Pedestrian Detection in Thermal Imagery Using Synthesized Images
My Kieu, Lorenzo Berlincioni, Leonardo Galteri, Marco Bertini, Andrew Bagdanov, Alberto Del Bimbo

Auto-TLDR; Improving Pedestrian Detection in the thermal domain using Generative Adversarial Network
Abstract Slides Poster Similar
Real Time Fencing Move Classification and Detection at Touch Time During a Fencing Match
Cem Ekin Sunal, Chris G. Willcocks, Boguslaw Obara

Auto-TLDR; Fencing Body Move Classification and Detection Using Deep Learning
Semantic-Guided Inpainting Network for Complex Urban Scenes Manipulation
Pierfrancesco Ardino, Yahui Liu, Elisa Ricci, Bruno Lepri, Marco De Nadai

Auto-TLDR; Semantic-Guided Inpainting of Complex Urban Scene Using Semantic Segmentation and Generation
Abstract Slides Poster Similar
Detecting Marine Species in Echograms Via Traditional, Hybrid, and Deep Learning Frameworks
Porto Marques Tunai, Alireza Rezvanifar, Melissa Cote, Alexandra Branzan Albu, Kaan Ersahin, Todd Mudge, Stephane Gauthier
Auto-TLDR; End-to-End Deep Learning for Echogram Interpretation of Marine Species in Echograms
Abstract Slides Poster Similar
Multi-Scale Deep Pixel Distribution Learning for Concrete Crack Detection
Xuanyi Wu, Jianfei Ma, Yu Sun, Chenqiu Zhao, Anup Basu
Auto-TLDR; Multi-scale Deep Learning for Concrete Crack Detection
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
SIDGAN: Single Image Dehazing without Paired Supervision
Pan Wei, Xin Wang, Lei Wang, Ji Xiang, Zihan Wang
Auto-TLDR; DehazeGAN: An End-to-End Generative Adversarial Network for Image Dehazing
Abstract Slides Poster Similar